

3.4 Сравнительный анализ настроек пи-регулятора при различных методах расчета
После проведения расчета ПИ-регулятора тремя различными способами нужно выбрать оптимальные настройки, для этого сведем результаты расчетов в таблицу 3. Переходные процессы, полученные различными методами, представлены на рисунке 16.
Основному условию
оптимальности
![]() соответствуют настройки регулятора,
полученные методом РАФХ.
соответствуют настройки регулятора,
полученные методом РАФХ.
Таблица 5 Сравнительный анализ настроек ПИ-регулятора
Параметр сравнения |
Метод расчета |
||
РАФХ |
Циглера-Никольса |
Инженерный |
|
Коэффициент усиления |
6,326 |
10,622 |
4,435 |
Время интегрирования , с |
3,073 |
1,891 |
17,216 |
Степень колебательности |
∞ |
∞ |
∞ |
Интегральный квадратичный критерий |
0,259 |
0,155 |
12,486 |
Вывод:
процессом, обеспечивающим минимум
квадратичного критерия и обладающим
степенью колебательности не ниже
заданной (![]() ),
является процесс, полученный при
настройках регулятора, рассчитанных
по методу Циглера-Никольса. Оптимальными
настройками будут:
),
является процесс, полученный при
настройках регулятора, рассчитанных
по методу Циглера-Никольса. Оптимальными
настройками будут:
![]() и
и
![]() с.
с.
Передаточная функция ПИ-регулятора будет иметь вид:
![]()
4 Параметрическая оптимизация системы с пид-регулятором
4.1 Метод расширенных амплитудно-фазовых характеристик
Передаточная функция ПИД-регулятора определяется по формуле:
![]() (43)
(43)
где — коэффициент усиления регулятора;
— время интегрирования;
![]() — время
дифференцирования.
— время
дифференцирования.
Расчетные формулы для настроек ПИД-регулятора:
 (44)
(44)
где — коэффициент усиления регулятора, ;
— передаточный коэффициент интегральной составляющей, ;
![]() — степень
колебательности;
— степень
колебательности;
— расширенная амплитудно-частотная характеристика (РАЧХ) объекта , определяется по формуле;
![]() ; (45)
; (45)
— расширенная фазо-частотная характеристика (РФЧХ) объекта (рисунок 8) определяется по формуле:
![]() , (46)
, (46)
где
![]() — рабочая частота.
— рабочая частота.
Таким образом, мы
имеем систему (44) двух уравнений с
четырьмя неизвестными
,
,![]() и
.
В связи с этим необходимо зафиксировать
два параметра, после чего отыскивать
решения. В расчете изначально фиксируется
время дифференцирования
и
.
В связи с этим необходимо зафиксировать
два параметра, после чего отыскивать
решения. В расчете изначально фиксируется
время дифференцирования
![]() ,где
,где
![]() .
.
Для расчета оптимальных настроек регулятора зададимся рядом значений для С2:
С20 = 15, С21 = 30, С22 = 35,
На первом шаге
выберем
![]() .
В этом случае ПИД-регулятор является
ПИ-регулятором, следовательно для него
будут справедливы все настройки
относящиеся к ПИ-регулятору за исключением
дополнительного параметра-времени
предварения.
.
В этом случае ПИД-регулятор является
ПИ-регулятором, следовательно для него
будут справедливы все настройки
относящиеся к ПИ-регулятору за исключением
дополнительного параметра-времени
предварения.
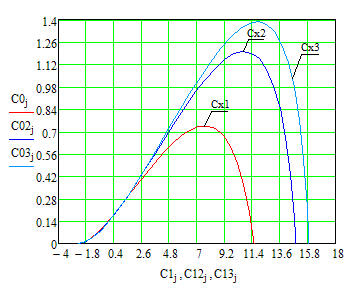
Рисунок 18 - Кривые равной колебательности
Программная реализация алгоритма в среде MathCAD представлена в приложении 8
Для дальнейшего расчета будем увеличивать значение до тех пор пока не добьемся получения оптимальных настроек. Результаты расчетов сведем в таблицу 6.
Таблица 6 Настройки ПИД-регулятора
Параметр сравнения |
Сx1 |
Cx2 |
Cx3 |
15 |
30 |
35 |
|
Коэффициент усиления |
9,95 |
13,076 |
14,35 |
Время интегрирования , с |
1,801 |
1,013 |
0,906 |
Степень колебательности |
0,392 |
∞ |
∞ |
Интегральный квадратичный критерий |
0,108 |
0,064 |
0,059 |
Рабочая частота
|
0,195 |
0,22 |
0,232 |
Проведя сравнительный анализ всех настроек, можно сделать вывод о том, что наиболее оптимальными являются настройки соответствующие времени дифференцирования равному 35 с, , так как при полученных настройках получается процесс, обеспечивающий минимум квадратичного критерия и обладающий степенью колебательности не ниже заданной m=0.29.
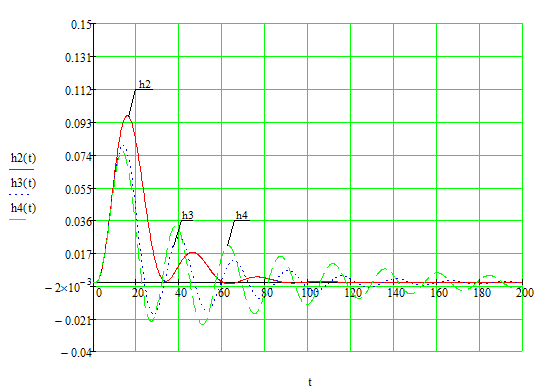
Рисунок 19 – Сравнение переходных характеристик замкнутой системы при различныхоптимальных настройках
Программная реализация алгоритма в среде MathCAD представлена в приложении 6