

3.2 Параметрическая оптимизация методом незатухающих колебаний (метод Циглера-Никольса)
Данный метод является приближенным методом расчета оптимальных настроек/
Расчет идет из основного уравнения:
![]() (29)
(29)
где
![]() (30)
(30)
Из (29) получаем:
 (31)
(31)
где
![]() — критическая частота, соответствующая
предельным настройкам П-регулятора.
— критическая частота, соответствующая
предельным настройкам П-регулятора.
![]() — фазо-частотная
характеристика (ФЧХ) объекта (рисунок
11):
— фазо-частотная
характеристика (ФЧХ) объекта (рисунок
11):
![]()
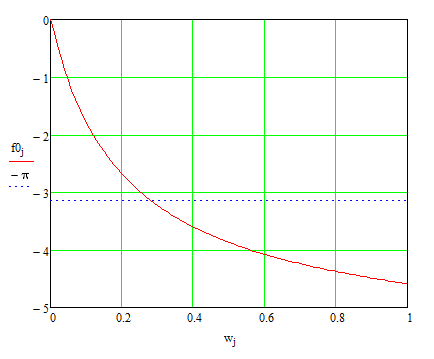
Рисунок 12 - Фазо-частотная характеристика объекта
Решая второе уравнение системы (31), находим, что
![]() (32)
(32)
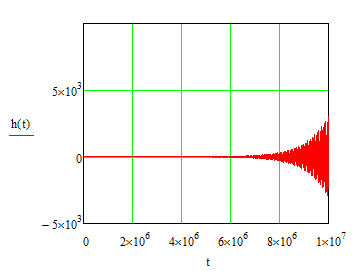
Рисунок 13 – Переходная характеристика замкнутой АСР с П-регулятором
Также для проверки
правильности найденного значения
![]() построим АФХ разомкнутой системы.
построим АФХ разомкнутой системы.
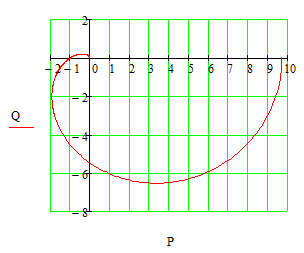
Рисунок 14 - Амплитудо – фазовая характеристика разомкнутой системы
Затем, подставив выражение (32) в первое уравнение системы (31), находим:
![]()
Рабочие настройки ПИ-регулятора определяются по следующим формулам Циглера-Никольса [2]:
![]() (33)
(33)
Тогда параметры ПИ-регулятора будут определяться как:
1. коэффициент усиления:
![]()
2. время интегрирования:
![]()
3. время изодрома:
![]()
Подставив полученные настройки в (16), получим передаточную функцию ПИ-регулятора:
![]()
Передаточная функция замкнутой системы с ПИ-регулятором определяется как:
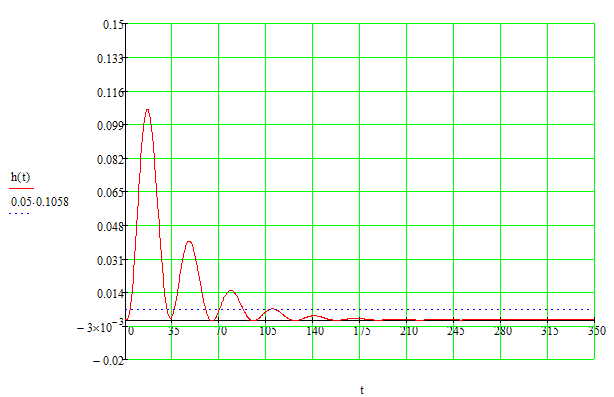
Рисунок 15 - Переходный процесс замкнутой системы
Определим параметры качества переходного процесса:
1. время регулирования:
![]()
2. интегральный квадратичный критерий:
![]() (34)
(34)
3.3 Параметрическая оптимизация инженерным методом
В практике наладочных работ широко используют приближённые формулы для определения оптимальных параметров настройки регулятора в зависимости от параметров моделей объектов управления и различных критериев оптимальности.
Наиболее длительную
проверку временем выдержали формулы
(таблица 7.13 [4]), опубликованные Всесоюзным
теплотехническим институтом
им. Ф.Э. Дзержинского (ВТИ). В качестве
критерия параметрической оптимизации
в формулах ВТИ приняты степень затухания
![]() и интегральная квадратичная оценка
качества
,
близкая к минимуму.
и интегральная квадратичная оценка
качества
,
близкая к минимуму.
Выбор формул ВТИ
основан на определении коэффициента
усиления объекта управления
![]() и вычислении отношения
и вычислении отношения
![]() (38)
(38)
где
![]() — транспортное запаздывание объекта
управления;
— транспортное запаздывание объекта
управления;
![]() — постоянная
времени объекта управления.
— постоянная
времени объекта управления.
В данном методе необходимо построить переходную характеристику объекта управления (рисунок 14). Для этого нужно произвести обратное преобразование Лапласа передаточной функции объекта управления.
![]() (39)
(39)
Коэффициент усиления объекта управления:
![]() (40)
(40)
Для определения и нужно построить касательную к переходной характеристике в точке перегиба (рисунок 14).
Для нахождения точки перегиба нужно решить уравнение:
![]()

Рисунок 16 - Переходная характеристика объекта управления
![]() и
и
![]() .
.
Так как отношение,![]() то имеют место формулы:
то имеют место формулы:
![]() (41)
(41)
Тогда остальные настройки ПИ-регулятора будут определяться как:
1. коэффициент усиления:
![]()
2. время интегрирования:
![]()
Подставив полученные настройки в (16), получим передаточную функцию ПИ-регулятора:
![]()
Передаточная функция замкнутой системы с ПИ-регулятором определяется как:
![]()
Из передаточной функции путем обратного преобразования Лапласа получаем переходный процесс.
Определим параметры качества переходного процесса:
интегральный квадратичный критерий:
![]()
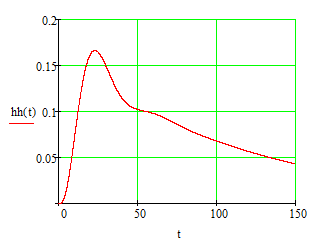
Рисунок 17 - Переходный процесс замкнутой системы
Программная реализация алгоритма в среде MathCAD представлена в приложении 5