

38. Дифференциальный индуктивный измерительный преобразователь. Конструкция, принцип действия, параметры и характеристики, достоинства и недостатки
Принцип действия основан на 1) изменении индуктивности катушки, 2) изменении сопротивления обмотки при относительном перемещении подвижного магнитопровода (якоря) по отношению к неподвижному магнитопроводу с катушкой.
И ндуктивный
преобразователь – катушка индуктивности,
полное сопротивление которой изменяется
при взаимном относительном перемещении
элементов магнитопровода.
ндуктивный
преобразователь – катушка индуктивности,
полное сопротивление которой изменяется
при взаимном относительном перемещении
элементов магнитопровода.
 ;
;
![]()
Функция преобразования: z=f(δ). Z=j·ω·L==j·ω·w2·S·μ0/2δ
Коэффициент магнитной проницаемости μ0=4π·10-7 Гн/м; H – напряженность магнитного поля; l – длина магнитной линии; δ – магнитный зазор; S - площадь перекрытия якорем полюсов неподвижного магнитопровода; lст – длина средней силовой линии по стальным участкам; μст – магнитная проницаемость железа магнитопровода.
![]()
![]()
(чувствительность зависит от δ – недостаток)
Д ифференциальный
индуктивный преобразователь состоит
из 2х одинаковых одинарных преобразователей,
которые имеют общий подвижный элемент.
ифференциальный
индуктивный преобразователь состоит
из 2х одинаковых одинарных преобразователей,
которые имеют общий подвижный элемент.
При перемещении якоря одна L1↑ а другая L2↓.
Якорь в среднем положении: δ1=δ2, x=0; z1=z2=z0
при перемещении якоря: x=var; z1=z0+Δz1; z2=z0+Δz2
изменение z: Δz1=Δz2= Δz при Δδ→0
режим х.х.: R→∞;
 ;
;
 Sсх.хх.=U/2
Sсх.хх.=U/2
Преимущества:
- возможность измерить сверхмалые перемещения с высокой чувствительностью и точностью;
- простота технической реализации.
- линейность ф-ции преобразования на значительном участке диапазона
Недостатки:
- влияние температуры среды на активное сопротивление обмотки, что выражается аддитивной погрешностью;
- значительная сила притяжения подвижного магнитопровода к неподвижному, что вызывает дополнительную погрешность.
Все эти недостатки устраняются в диф. ИП при мостовой схеме включения.
Преимущества диф. ИП:
- линейность выходной характеристики на значительном участке диапазона измерений;
- незначительная сила притяжения якоря;
- практически полная компенсация аддитивной погрешности;
- чувствительность в 2 раза выше чувствительности одинарного преобразователя;
- высокая стабильность нулевой точки.
Недостатки:
- влияние колебаний частоты питающей сети;
- изменение напряжения питания приводит к изменению магнитного сопротивления и чувствительности индукционного преобразователя;
- влияние температуры окружающей среды на изменение магнитной проницаемости материала магнитопровода (мультипликативная погрешность).
Источники погрешности ИП:
1) температурная (аддитивная) (Rст=var, μст=var). Изменение μст вызывает дополнительную мультипликативную погрешность. Устраняется полностью (аддитивная) и частично (мультипликативная) мостовой схемой;
2) изменение напряжения питания
Uпит=var (μст=var → Rм=var → S=var)
(аддит.) (мульт.)
3) w=var → Rм=var→ S=var
4) нестабильность нулевого положения якоря:
U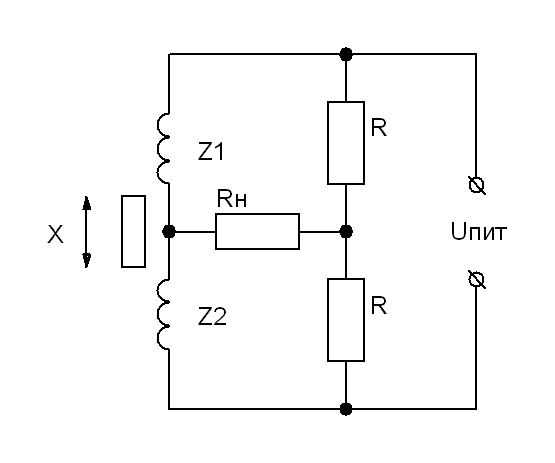 вых=0
среднее положение; Uвых≠0 –
аддитивная.
вых=0
среднее положение; Uвых≠0 –
аддитивная.
Схема ДИП
39. Трансформаторные измерительные преобразователи. Конструкция, принцип действия, параметры и характеристики, достоинства и недостатки.
Взаимоиндукция между обмотками:
![]()
Ф2 - магнитный поток во второй обмотке;
ω – круговая частота;
![]()
![]()
![]() (1)
(1)
μ0 – магнитная проницаемость материала магнитопровода; Sx – площадь перекрытия неподвижного магнитопровода подвижным магнитопроводом (якорем) при его относительном перемещении.
Анализ выражения (1) показывает что колебание частоты питающего, а также температуры ОС вызывает дополнительные погрешности при измерении перемещений. Конструктивно диапазон измерения перемещения ограничивается размерами полюсов и током намагничивания, зависящих от зазора δ.
Принцип действия трансформаторных преобразователей основан на изменении индуктивности двух обмоток при изменении конечных размеров магнитной системы (зазор между якорем и полюсами).
Возможна реализация двух вариантов трансформаторного преобразователя:
на изменении величины магнитного зазора между якорем и полюсами δ (гиперболическая зависимость);
при постоянном магнитном зазоре относительное перемещение якоря по отношению к магнитопроводу неподвижному (Sx=var) (линейная зависимость).
Недостатки одинарных трансформаторных преобразователей:
влияние колебаний частоты питающего напряжения;
влияние температуры окружающей среды;
сложно обеспечить симметрию при относительном перемещении, что вызывает дополнительную погрешность.
О днако
все эти недостатки могут быть устранены
конструкцией диф. трансформаторного
преобразователя (ДТП) плоской или
цилиндрической конструкции.
днако
все эти недостатки могут быть устранены
конструкцией диф. трансформаторного
преобразователя (ДТП) плоской или
цилиндрической конструкции.
ДТП представляет собой 2 одинарных трансформаторных преобразователя и 1 общий подвижный магнитопровод. При перемещении якоря происходит компенсирующее изм. магнит. зазора в 2-х симметричных магн. системах, что вызывает изменение Евых (ДТП с плоско-паралельным перемещением якоря). Вторая конструкция ДТП предусматривает продольное перемещение якоря, мех. связанного с объектом, перемещение которого следует измерить. В первичном ДТП имеется 3 обмотки: одна первичная (запитана переменным током) и две вторичных, включены встречно.
Плоский ДТП
U1=пост. ток δ↓ L1↑ jωL1↑ I1↓ E2↓; E2 = f(I1)
В исходном положении δ1=δ2=δ0
δ0 - магнитный зазор при среднем положении якоря.
В случае, когда начальный зазор δ0 намного превосходит изменение Δδ, ДПТ имеет практически линейную функцию преобразования.
В ДТП происходит изменение магнитных зазоров δ1 и δ2 на одну и ту же величину ∆δ, которая определяет величину выходной ЭДС Е2:
δ1= δ0- Δδ
δ2= δ0+ Δδ
где δ0 – магнитный зазор между якорем и магнитопроводом при отсутствии перемещения
![]() - функция
преобразования ДТП. (2)
- функция
преобразования ДТП. (2)
Анализ (2) показывает пропорциональную зависимость Е2 от Δδ при постоянстве величин, входящих в выражение
Цилиндрический преобразователь:
Е2=2·kт·lх,
kт – коэффициент трансформации между обмотками w1 и w2, lх – линейное перемещение (осевое).
Конструкция ДТП позволяет определить кроме величины и направление перемещения.
Основная погрешность ДТП: γ0=±0,1-0,2%; чувствительность для плоского ДТП:
![]()
S зависит от δ0, чем меньше δ0, тем больше S.
Преимущества ДТП:
высокая чувствительность за счет большого числа витков во второй обмотке;
в отличие от одинарного ТП, возможность определять напряжение перемещения по фазовому углу;
высокое выходное сопротивление вторичной обмотки позволяет легко согласовать ДТП с последующими радиоэлектронными приборами;
использование диф. конструкции ТП и ее включение в мостовую измерительную схему позволяет практически полностью скомпенсировать составляющие погрешности и свести ее к минимуму.
Область применения ДТП:
Измерение уровня
Измерение усилий
Измерение давлений
Измерение перемещений механизмов
Измерение угловых перемещений
Источники погрешностей ТП:
Температурная. Колебания температуры ОС вызывают изменения сопротивления обмоток
Влияние колебаний частоты питающего напряжения
Влияние колебаний величины напряжения
Непостоянство зазора δ0 между подвижным якорем и магнитопроводами при отсутствии перемещений.
Использование дифференциальной конструкции ТП и ее включение в мостовую схему позволяет практически полностью скомпенсировать составляющие погрешности и свести ее к минимальному значению.