

35. Измерительные приборы квд.
Прибор дифференциально-трансформаторный вторичный автоматический КВД1 предназначен для измерения и регулирования избыточного, вакуумметрического давления, расхода, уровня и других величин, которые могут быть преобразованы в комплексную взаимную индуктивность.
1.4. Прибор КВД1 работает в комплекте с взаимозаменяемыми датчиками, осуществляющими преобразование измеряемых величин в комплексную взаимную индуктивность от 0 до 10 или 10—0—10 mН.
Измерительная схема прибора квд1
Прибор с дифференциально-трансформаторной схемой КВД1 работает в комплекте с датчиками, имеющими специальную дифференциально-трансформаторную катушку с подвижным сердечником (плунжером), выполненным из электротехнической стали.
Перемещение сердечника дифференциально-трансформаторного датчика осуществляется чувствительным элементом и зависит от величины измеряемого параметра.
В прибор встроена аналогичная дифференциально-трансформаторная катушка. Сердечник в катушке перемещается при помощи лрофилированного кулачка, поворот которого осуществляется реверсивным двигателем.
Первичные обмотки обеих катушек соединены последовательно и питаются от специальной обмотки силового трансформатора усилителя напряжением 24 V.
Вторичные обмотки состоят из двух секций, включаемых навстречу друг другу. Вторичные обмотки прибора и датчика соединены по дифференциальной схеме. На выход схемы включен усилитель.
При питании напряжением первичных обмоток дифференциально-трансформаторных катушек во вторичных обмотках индуктируется переменное напряжение, величина и фаза которого зависят от положения плунжеров в катушках.
При рассогласованных положениях плунжеров в катушках напряжения, индуктируемые во вторичных обмотках, не будут равны друг другу.
В этом случае на вход усилителя будет подаваться напряжение рассогласования, величина и фаза которого зависят от положения плунжеров в катушках.
Это напряжение, усиленное усилителем, приводит во вращение двигатель, который при помощи кулачка перемещает плунжер в катушке прибора до того момента, пока разность напряжений не •станет равной нулю.
Таким образом, каждому положению сердечника дифференциально-трансформаторной катушки первичного прибора, определяемому величиной измеряемого параметра, соответствует определенное положение сердечника вторичного прибора КВД1, и, следовательно, определенное положение шкалы прибора КВД1 относительно неподвижного указателя.
Для удобства наладки и эксплуатации комплекта в дифференциально-трансформаторной катушке прибора КВД1 предусмотрена третья дополнительная обмотка, служащая для корректировки нулевого положения сердечника.
Эта обмотка располагается в средней части дифференциально-трансформаторной катушки прибора, шунтируется переменным сопротивлением R1=100 Ом и включается последовательно со вторичными обмотками прибора и датчика. Перемещением движка потенциометра R1 изменяется величина дополнительного напряжения, подаваемого на вход усилителя.
Делитель (R2, R3), шунтирующий вторичную обмотку дифференциально-трансформаторной катушки, служит для регулировки диапазона измерения. Максимальное напряжение, подаваемое на вход усилителя, должно быть 400 mV.
Для контроля исправности прибора в схеме предусмотрен переключатель В2, при включении которого замыкаются накоротко концы вторичной обмотки катушки датчика и обмотки корректировки нуля.
В этом случае на усилитель поступает напряжение только со вторичной обмотки катушки.
Усиленное напряжение обеспечивает вращение двигателя, при котором плунжер устанавливается в нейтральное положение. При этом напряжение, снимаемое с катушки, будет равно нулю (двигатель остановится), что соответствует положению начальной отметки шкалы против неподвижного указателя
36. ИНДУКТИВНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ. КОНСТРУКЦИЯ, ПРИНЦИП ДЕЙСТВИЯ, ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ, ДОСТОИНСТВА И НЕДОСТАТКИ.
Принцип действия: изменение взаимного расположения подвижного магнитопровода по отношению к неподвижному и возникающей в следствие этого изменении индуктивности обмотки, расположенной на неподвижном магнитопроводе и на изменении ее сопротивления.
Достоинства:
линейность ф-ии преобразования на значительном участке диапазона (диф. преобразователь);
простая конструкция;
возможность измерять сверхмалые перемещения с высокой точностью и чувствительностью.
Недостатки:
в случае одинарного инд. преобразователя – нелинейность ф-ии преобразования;
наличие аддитивной погрешности, обусловленной влиянием температуры на сопротивление обмотки преобразователя;
влияние колебаний частоты питающей сети на результат измерения;
влияние колебаний напряжения питающей сети на изменение магнитного сопротивления и чувствительность магнитного преобразователя.
Конструкция одинарного инд. преобразователя изображена на рис.1 а), дифференциального - рис.1 б).

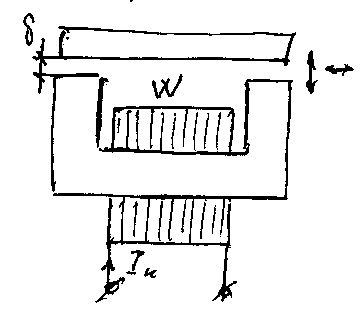

Рисунок 2 – Выходной ток преобразователя.
Индуктивность преобразователя:
 ,
,
где
![]() -
число витков катушки;
-
число витков катушки;![]() -
магнитный поток;
-
магнитный поток;
![]() -ток
в обмотке;
-ток
в обмотке;![]() - напряженность магнитного поля;
- напряженность магнитного поля;![]() - длинна электромагнитной линии;
- длинна электромагнитной линии;![]() - магнитное сопротивление (зависит от
материала маг. магнитопровода),
- магнитное сопротивление (зависит от
материала маг. магнитопровода),
![]() -магнитная проницаемость,
-магнитная проницаемость,
![]() - длинна эл. линии по стали,
- длинна эл. линии по стали,
![]() - магнитная проницаемость материала
магнитопровода.
- магнитная проницаемость материала
магнитопровода.
Полное сопротивление преобразователя:
![]() ,
,
где
![]() -
площадь перекрытия якорем полюсов
неподвижного магнитопровода.
-
площадь перекрытия якорем полюсов
неподвижного магнитопровода.
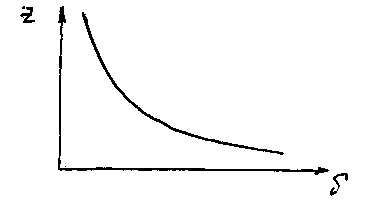
Рисунок 3 – Сопротивление преобразователя.
Чувствительность:
Поэтому в конце диапазона измерять малые перемещения не представляется возможным.
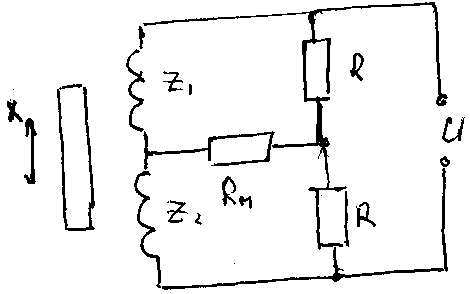
Рисунок 4 – Схема включение ДИП.
37. КЛАССИФИКАЦИЯ ИНДУКТИВНЫХ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ. ОБЛАСТЬ ПРИМЕНЕНИЯ, ИСТОЧНИКИ ПОГРЕШНОСТЕЙ И СПОСОБЫ ИХ СНИЖЕНИЯ.
Классификация:
одинарный индуктивный преобразователь перемещения, рис1, а);
дифференциальный индуктивный преобразователь перемещения. Рис. 2 б).
а) б)
Область применения:
Индуктивные измерительные преобразователи применяются для измерения малых линейных и угловых перемещений, по этой причине могут использоваться как промежуточные преобразователи при измерении других физических величин так или иначе преобразованных в перемещение.
Источники погрешностей и способы их снижения:
изменение температуры приводит к изменению активного сопротивления обмоток, а также к изменению магнитной проницаемости магнитопровода – температурная погрешность – устраняются при ДИП или мостовых схемах включения;
колебание питающего напряжения приводит к изменению магнитной проницаемости магнитопровода – погрешность измен. питающего напряжения – устраняется при мостовой схеме включения;
колебание частоты сети питания – погрешность от изм. частоты пит. напряжения – стабилизация частоты питания.
Дрейф «0» в мостовой измерительной схеме – применение дополнительных элементов.