

27 Магнитоиндукционный датчик скорости движения. Конструкция, принцип действия.
Дм2 применяется в аппаратуре АУК-1М
Конструкция данного датчика приведена на рисунке 1
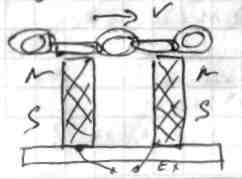
Преимущества:1 возможность работы в сложных условиях эксплуатации;2 малые затраты на техн.обслуживание;3 простота конструкции.
Недостатки: 1 невысокая точность; 2 нелинейность выходной характеристики.
28. Допплеровские ультразвуковые расходомеры
Рассматриваемые расходомеры основаны на измерении, зависящем от расхода допплеровской разности частот f1-f2 возникающей при отражении акустических колебаний неоднородностями потока. Разность f1 — f2 зависит от скорости v частицы, отражающей акустические колебания и скорости с распространения этих колебаний в соответствии с уравнением
![]() (1)
(1)
где f1 и f2 — исходная и отраженная частоты акустических колебаний соответственно; а' — угол между вектором скорости v частицы отражателя и направлением исходного луча; а" — угол между тем же вектором v и направлением луча отраженного. При симметричном расположении излучающего и приемного пьезоэлементов (рис. 1) относительно скорости v или, что то же, оси трубы углы а' и а" равны друг другу. Тогда из предыдущего уравнения получим
![]()
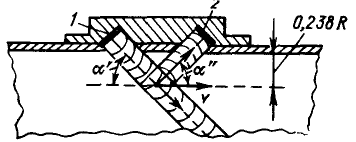 рис.1:
схема доплеровского преобразователя
расхода1 – излучающий;2 – принимающий
пьезоэлемнт
рис.1:
схема доплеровского преобразователя
расхода1 – излучающий;2 – принимающий
пьезоэлемнт
Таким образом, измеряемая разность частот может служить для измерения скорости v частицы отражателя, т.е для измерения местной скорости потока. Это сближает допплеровские ультразвуковые расходомеры с другими расходомерами, основанными на измерении местной скорости. Для их применения нужно знать соотношение между скоростью v частицы отражателя и средней скоростью потока v0. Последняя для турбулентных потоков находится на расстоянии 0,242r, где r — радиус трубы.
При небольших диаметрах труб (менее 50—100 мм) встречаются допплеровские расходомеры, у которых длины излучающего и приемного пьезоэлементов равны внутреннему диаметру трубы. Они реагируют не на одну, а на несколько местных скоростей частиц, находящихся в диаметральной плоскости сечения трубы.. Градуировочная характеристика расходомера, охватывающая как ламинарную, так и турбулентную область, показана на рис. 2. Так как отношение средних скоростей по сечению vc и по диаметру vD для ламинарного режима меньше (vc/vD — 0,75), чем для турбулентного (vc/vD = 0,92-7-0,95), то наклон характеристики для последнего режима меньше, чем для первого. При уменьшении расхода ламинарный режим начинается с числа Re = 2320, а при увеличении расхода он из-за недостаточно длинного прямого участка сохраняется и при больших числах Re. Для исключения неопределенности показаний в переходной зоне пьезоэлементы в средней части длиною I = 0.36D были экранированы. Благодаря этому отношение vc/vD в ламинарной зоне резко возросло и практически стало таким же, как и у турбулентной зоны, и наклон градуировочной прямой стал одинаковым в обеих зонах. Для предотвращения образования вихрей в сравнительно больших карманах, где установлены пьезоэлементы, свободное пространство в них заполнено фольгой из полистирола, имеющего одинаковое с водой акустическое сопротивление. Без фольги градуировочная зависимость в турбулентной зоне отклоняется от прямой / и принимает вид кривой 2.
Теперь в большинстве случаев пьезоэлементы у допплеровских расходомеров помещают снаружи трубы. Это особенно необходимо в случае измерения загрязненных и абразивных веществ, но при этом надо считаться с дополнительными погрешностями, обусловленными в частности преломлением луча в стенке трубы.
По сравнению с другими ультразвуковыми расходомерами допплеровские имеют наименьшую точность ввиду того, что выходной сигнал представляет целый спектр частот, возникающих вследствие сдвига исходной частоты не одной частицей — отражателем, а рядом частиц, имеющих различные скорости. Поэтому относительная погрешность измерения расхода обычно не менее 2—3 %.
Они применяются главным образом для измерения расхода различных гидросмесей, в том числе пульп, суспензий и эмульсий, содержащих частицы, отличающиеся по плотности от окружающего вещества. Но и естественных неоднородностей (в том числе газовых пузырей), имеющихся в различных жидкостях, бывает достаточно для проявления эффекта Допплера.
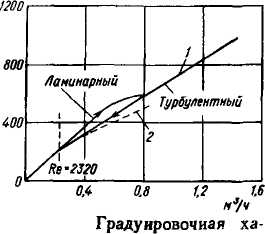
Градуировочная характеристика
29. УЛЬТРОЗВУКОВЫЕ ЧАСТОТНО-ВРЕМЕННЫЕ РАСХОДОМЕРЫ
Метод, основанный на разности времен распространения ультразвуковых волн, направленных за потоком и против него (рис. 2). Ультразвуковые колебания перемещаются подвижной средой. Поверхностью отражения для импульса зондирования является естественная внутренняя поверхность трубопровода или специальный экран непосредственно в измеряемой среде. При этом средняя скорость измеренной среды может определяться на основании эффекта сноса ультразвукового колебания подвижной средой и изменения времени прохождения луча как векторная разность скоростей ультразвуковых колебаний по направлению движения измерительной среды и против нее.
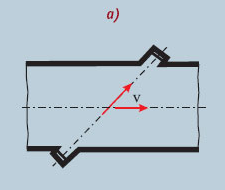
Рисунок 2
Измерительные схемы основаны на измерении разности времен, разности частот прохождения ультразвуковых сигналов, обусловленных скоростью потока.
1) Времяимпульсная
— измеряется разность продолжительности
прохождения коротких импульсов, которые
направлены по потоку и против него (рис.
2, а) [14]:
![]() где
Q — расход;
B(Re, ρ, μ, t, P, ε, D) — функция,
зависящая от параметров измеряемой
среды и параметров трубопровода;
L —
путь ультразвукового луча;
Re — число
Рейнольдса измеряемой среды;
ρ —
плотность измеряемой среды;
μ — вязкость измеряемой среды;
t — температура измеряемой среды;
P
— давление измеряемой среды;
ε —
шероховатость трубопровода;ε
D
— диаметр трубопровода;
c — скорость
ультразвука в измеряемой среде;
—
угол ввода ультразвукового луча
относительно вертикали;β
где
Q — расход;
B(Re, ρ, μ, t, P, ε, D) — функция,
зависящая от параметров измеряемой
среды и параметров трубопровода;
L —
путь ультразвукового луча;
Re — число
Рейнольдса измеряемой среды;
ρ —
плотность измеряемой среды;
μ — вязкость измеряемой среды;
t — температура измеряемой среды;
P
— давление измеряемой среды;
ε —
шероховатость трубопровода;ε
D
— диаметр трубопровода;
c — скорость
ультразвука в измеряемой среде;
—
угол ввода ультразвукового луча
относительно вертикали;β
2) Частотная —
измеряется разность частот повторения
коротких импульсов или пакетов УЗ
колебаний, которые направлены по потоку
и против него:
![]()
30. МЕТОДЫ ОЦЕНКИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ.
Абсолютная погрешность – это разница между текущим значением измеряемой величины ХП и действительным значением ФВ Хд:
![]()
Относительная погрешность определяется по формуле:
![]()
Приведенная погрешность по формуле:
![]()
где Хн – нормирующее значение (предел шкалы).
Соответствие класс точности устанавливается путем определения основных погрешностей при сравнении показаний поверяемого прибора с показаниями более точного, образцового прибора (метод сличия).
Данное средство измерения а класса точности А поверяют по образцовому прибору δ класса точности Б.
При поверке измерительных приборов должно выполнятся условие:
Б<А; Б=А/3*(XНП/ХНО)
где XНП и ХНО – соответственно нормирующее значение шкалы поверяемого и образцового прибора.
Кроме этого условия, необходимо учитывать при поверке систему образцового прибора и вариацию его показаний, которая не должна превышать половины допускаемой основной погрешности.
Если погрешность
поверяемого прибора
![]() ,
то поверяемое средство а соответствует
своему классу точности А. Если хотя бы
одна из погрешностей поверяемого
прибора
,
то поверяемое средство а соответствует
своему классу точности А. Если хотя бы
одна из погрешностей поверяемого
прибора
![]() , то поверяемый прибор не соответствует
своему классу точности. Если – между
, то поверяемый прибор не соответствует
своему классу точности. Если – между
![]() ,
то для необходимо провести дополнительные
испытания для установления класса
точности.
,
то для необходимо провести дополнительные
испытания для установления класса
точности.
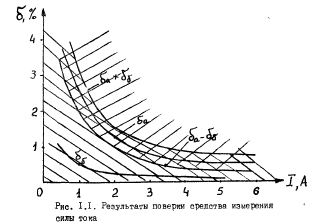
Результаты поверки средства измерения силы тока
При оценке случайных погрешностей:
1) определяют закон распределения;
2) Определяют коррелируемые и некоррелируемые погрешности;
3) Используя энтропийный коэффициент определяют среднее квадратическое отклонение для каждой погрешности:
![]()
где
![]() - приведенная погрешность,
- приведенная погрешность,
![]() - энтропийный коэффициент;
- энтропийный коэффициент;
4) Суммируют коррелируемые погрешности алгебраически:
![]()
5) Суммируют некоррелируемые погрешности геометрически:
![]()
6) Определяется закон распределения суммарной погрешности, ее энтропийный коэффициент и суммарная приведенная погрешность (ОБРАТНО КАК В ПУНКТЕ 3).