

Генераторный
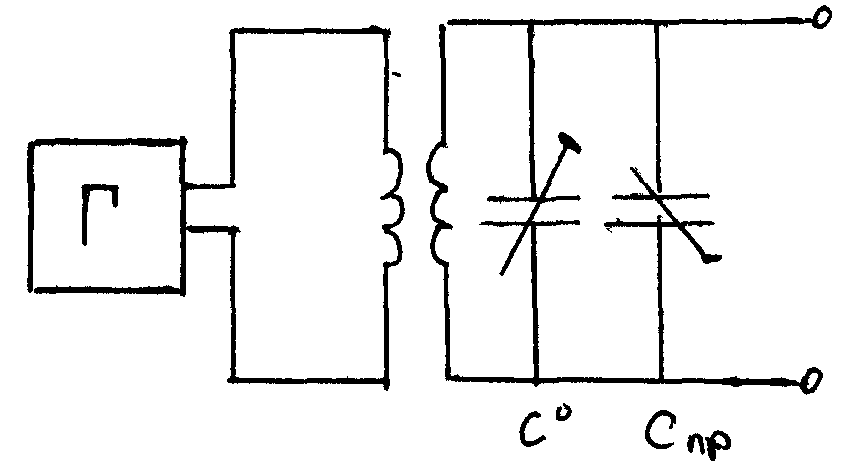
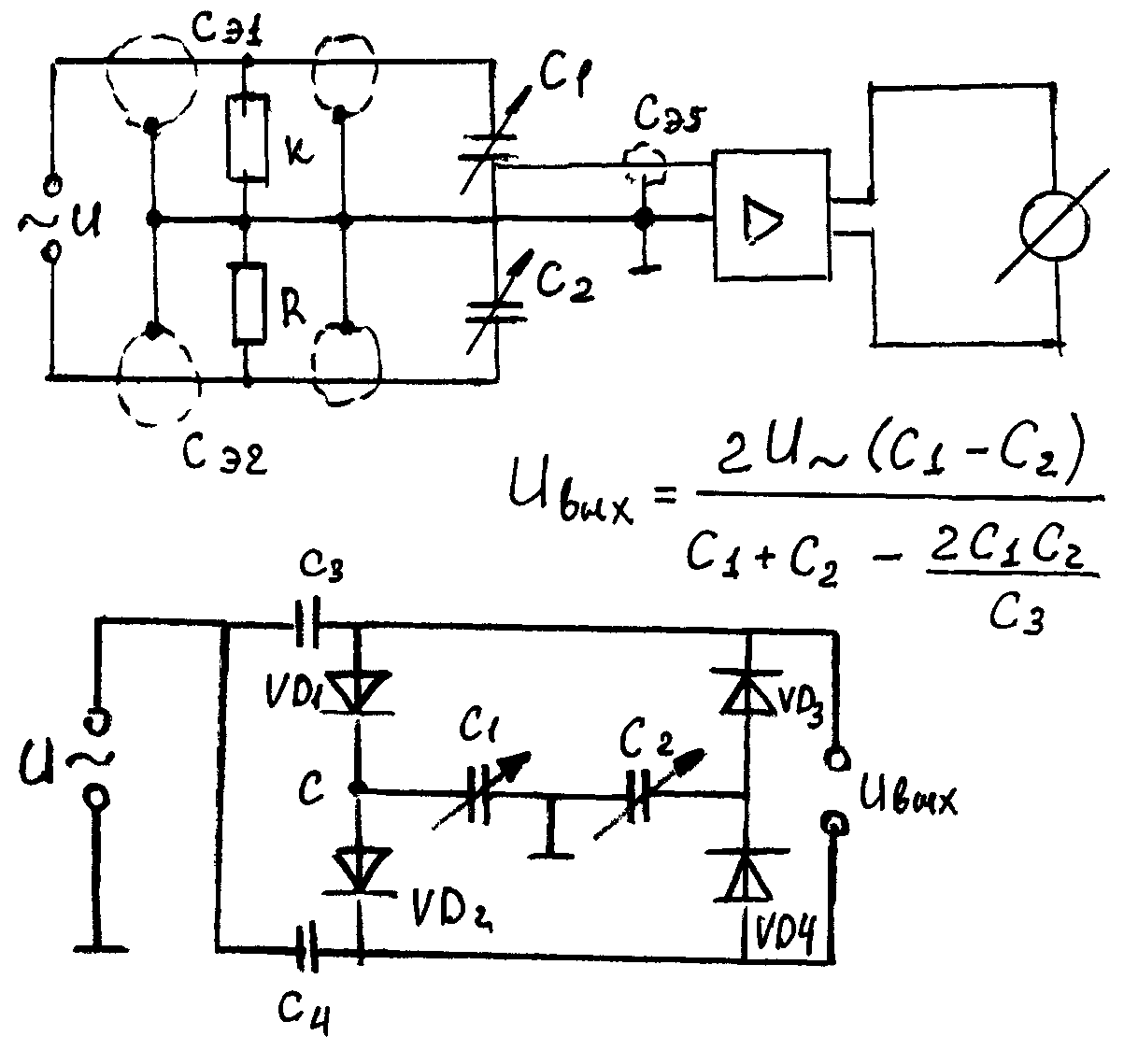 2.
Мостовая
измерительная
(схема как правило применяется для
дифференциальных мостовых преобразователей).
2.
Мостовая
измерительная
(схема как правило применяется для
дифференциальных мостовых преобразователей).
Преимущественно мостовых схем включения является высоко чувствительность и малая погрешность.
Преимущества ёмкостных:
Возможность измерения быстропротекающих процессов.
Возможность создания измерительных преобразователей с требуемой функцией преобразования.
Незначительная сила притяжения между обмотками, что не вызывает дополнительные погрешности.
Недостатки:
Сложность технической реализации.
Влияние запылённости и загрязнённости шахтной атмосферы.
Погрешности ёмкостных ип.
1. Температурная – связана с изменением линейных размеров при колебаниях температуры ( аддитивная погрешность).
Аддитивная погрешность как правило устраняется дифференциальной схемой включения.
2. Обусловленная внешним током утечки.
Для устранения этого вида погрешности необходимо уменьшить внутреннее сопротивление преобразователя и увеличивать частоту питания с 50Гц до
5 – 6кГц.
3. Влияние ёмкости экранов соединительных проводов при измерении влажности и вибрации.
Влияние этой паразитной ёмкости может быть устранено в мостовой измерительной схеме.
Серийно выпускаемые ёмкостные уровнемеры которые позволяют измерять уровень жидкости в резервуарах до 5 – 6 тонн. Типы ГРУЗ (РУС).
Индуктивные измерительные преобразователи перемещения.
Принцип действия основан:
На изменении индуктивности катушки.
На изменении активного сопротивления обмотки.
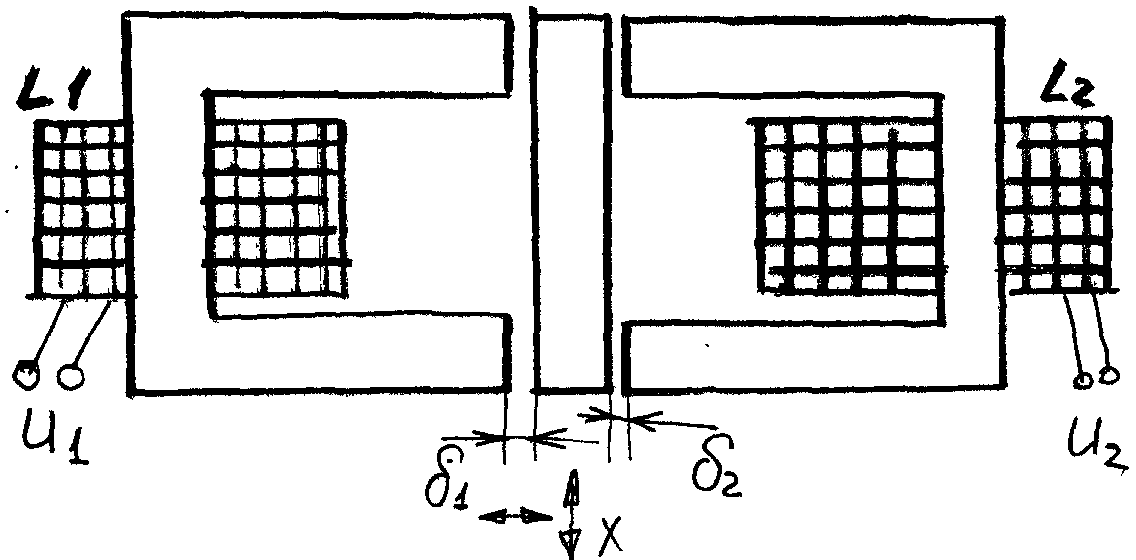
Индуктивный преобразователь представляет собой катушку индуктивности полное сопротивление которой изменяется при взаимном перемещении элементов магнитопровода.
![]()
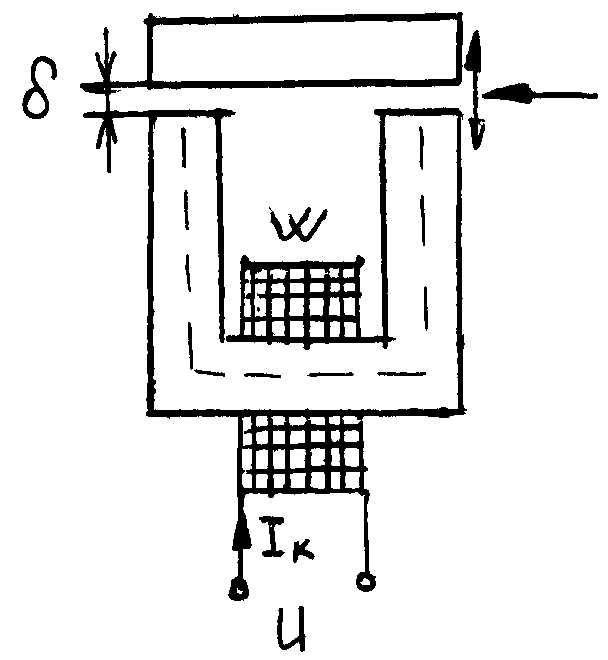
Н – напряжённость магнитного поля
![]()
μ0 – магнитная проницаемость магнитопровода,
S – площадь перекрытия.
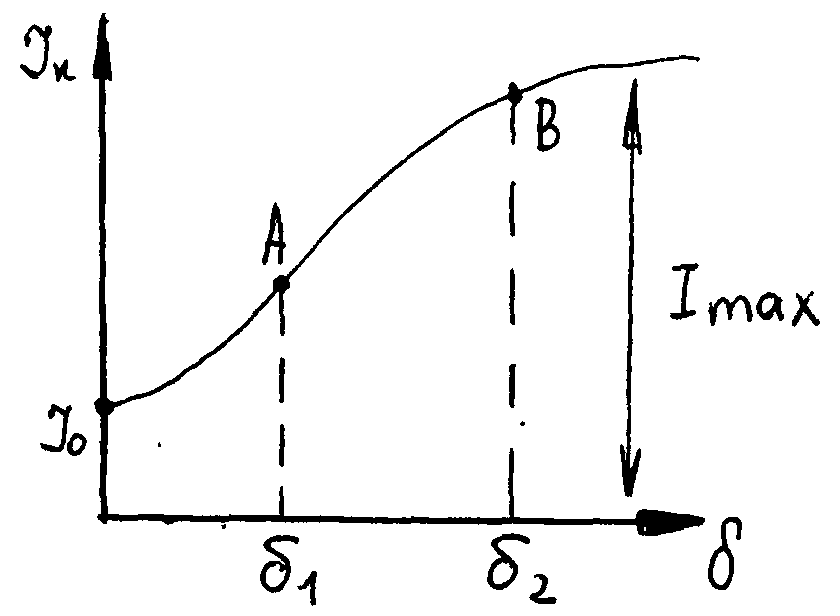
![]()
С увеличением расстояния перемещения δ уменьшается чувствительность.
На величину Z оказывает влияние площадь перекрытия подвижного магнитопровода неподвижное и величина зазора.
Преимущество использования индуктивного преобразователя:
Простота конструкции.
Возможность измерения сверх перемещений с высокой чувствительностью.
Недостатки:
Нелинейная функция преобразования.
Наличие аддитивной погрешности вызванное влиянием температуры на активное сопротивление обмотки.
Значительная сила притяжения подвижного магнитопровода к неподвижному, что вызывает дополнительную погрешность.
Все недостатки индуктивных ИП могут быть устранены в дифференциальном индуктивном преобразователе имеющем определённую схему включения.
 Преимущество дифференциальных
индуктивных преобразователей:
Преимущество дифференциальных
индуктивных преобразователей:
Линейность функции преобразования на значительном участке диапазона измерения.
Значительно меньшая сила притяжения действующая на якорь.
Выходное напряжение преобразователя меньше всего зависит от величины и частоты питающего, т.е. при отсутствии перемещения нулевой точки обладает большой стабильностью характеристик.
По сравнению с одинарным дифференциальный имеет чувствительность выше в 2 раза.
Значительно снижается аддитивная погрешность.
Недостатки:
Влияние колебаний частоты питающей сети.
Изменение напряжения питания вызывает изменение магнитного сопротивления и чувствительности измерительного преобразователя.
Колебания температуры окружающей среды вызывает изменение магнитной проницаемости материала магнитопровода а следовательно вызывает аддитивную погрешность.
Схема замещения:
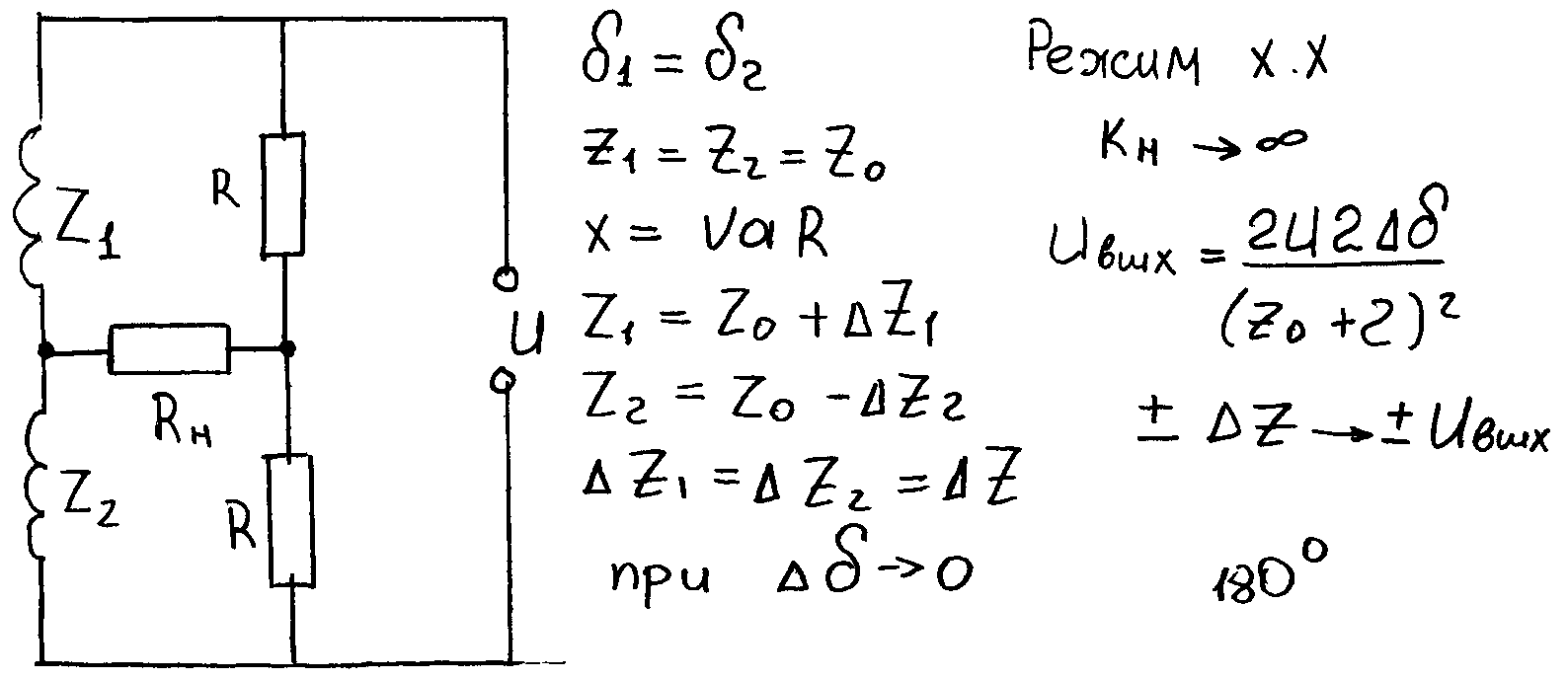
Чувствительность:
