Индуктивные датчики приближения формы «Клашка» (электроника и автоматизация).
Это бесконтактно работающее датчики вращения приводов и элементов машин не подвергающиеся механическому износу. Как правило монтируются в качестве концевых выключателей но могут по своим прочностным характеристикам (полная заливка корпуса) и благодаря большой допустимой рабочей частоте применяется, например, как импульсные преобразователи учёта числа оборотов. Индуктивные датчики приближения применяются там где требуется большая частота включения и скорость срабатывания, при высокой надёжности эксплуатации в агрессивных средах и длительном сроке эксплуатации.
Z

G – выпрямитель,
S – колебательный контур.
Катушка S выполнена в виде открытого ферритового сердечника свободная сторона которого образует активную поверхность датчика приближения. Гетеродин О вырабатывает высокочастотные колебания с переменным магнитным полем. Колебания излучаются на открытой стороне ферритового сердечника. При попадании в поле металла В из колебательного контура S поглощается энергия поля Z на вихревые токи и пере магниченные в металле В. При достаточном приближении к металлу колебания гетеродина приближается и датчик включается и на выходе усилителя V появляется рабочий сигнал А. Диапазон срабатывания индукционного датчика определяется величиной переменного магнитного поля Z и размерами самого датчика.
Технические характеристики датчика:
1) При работе с программами контролерами:
а) диапазон питающего напряжения: 8 – 30В (постоянный ток),
б) частота срабатывания датчика до 3кГц,
в) имеется выходная защита от перепутывания полярности проводов при
включении датчика и защита от к.з.
г) содержит двухполюсный нормально открытый контакт с дополнительной
токовой нагрузкой 5 – 60мА, или трех полюсный нормально открытый
контакт с дополнительной токовой нагрузкой до 200 или 400мА.
д) допускается утопленный монтаж.
2) Для работы со средствами защиты (второй класс датчиков):
а) диапазон питающего напряжения 90 – 280В (переменное напряжение),
б) имеются те же защиты и плюс ещё и светодиод,
в) комплектуются двухполюсники с нормально открытым контактом с
дополнительной токовой нагрузкой 10 – 240мА.
д) допускается утопленный монтаж ,
е) конструктивно выполненные в виде цилиндра с диаметром от 18мм и
более, при длине образующей от 34 мм, с диапазоном температур
(-30 до +80).
Тензорезисторные ип.
Принцип действия основан на изменении сопротивления проводника при деформации сжатия или растяжками.
![]()
По конструкции тензорезисторные преобразователи бывают:
проволочные,
плёночные,
фольговые.
Как правило в проволочных резисторах применяются константан. Применение этого материала позволяет добиться нестабильности породы 1%.
Полупроводниковые
– используют монокристаллы кремния и
германия.
![]()
где R0 – сопротивление тензорезистора при отсутствии деформации,
ST – тензо чувствительность (ST =50…150),
Е – деформация.
Стандартные сопротивления тензорезисторов по ГОСТ 50; 100; 200; 400; 800 Ом.
Проволочные тензорезисторы используют с микро проводом диаметром от 20 - 50 мк.м.
Полупроводниковые – выполняются на специальной подножке от 5х20 миллиметров при толщине 4 – 12 микрон.
Преимущества проволочных тензорезисторов:
Простота конструкции,
Возможность измерения давлений усилий достаточно высокой точности..
Недостатки:
Предпочтительно измерять большие усилия,
Изменение сопротивления проводника существенно зависит от температуры окружающий среды.
Преимущества полупроводниковых:
Возможность измерения малых усилий и давлений.
Недостатки:
Значительная температурная погрешность,
Большой разброс параметров и характеристик,
Сложность конструкции,
Нелинейная характеристика.
Основной погрешностью проволочных резисторов является погрешность определяемое из условия:
![]()
Δt – изменение температуры окружающей среды,
S
Соответственно
коэффициенты удлинения деталей
и
тензорезистора
под действием температуры,![]()
α – коэффициент линейного температурного расширения.
Одним из способов снижения использования материалов имеющих низкий коэффициент расширения.
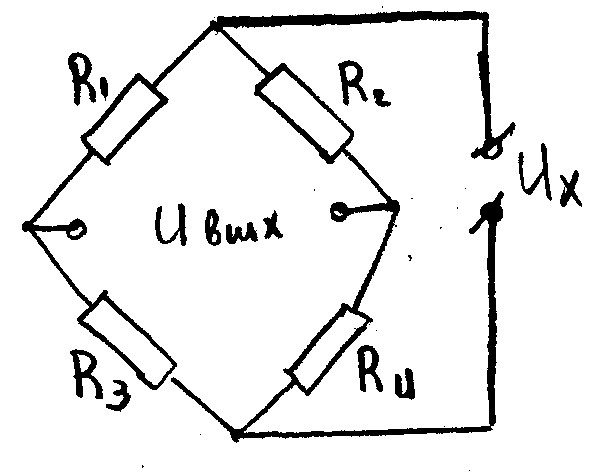
Для полупроводниковых терморезисторов температурная погрешность также является основной, для того чтобы её учесть применяют следующие формы.
С помощью этой схемы устраняется
действие аддитивной температурной
погрешности: т.к. выходной сигнал не
превышает
10
– 20 мВ обязательно устанавливается
усилитель. Если искробезопастное
питание мостовой
схемы не постоянно, то возникает другая
мультипликативная погрешность.