

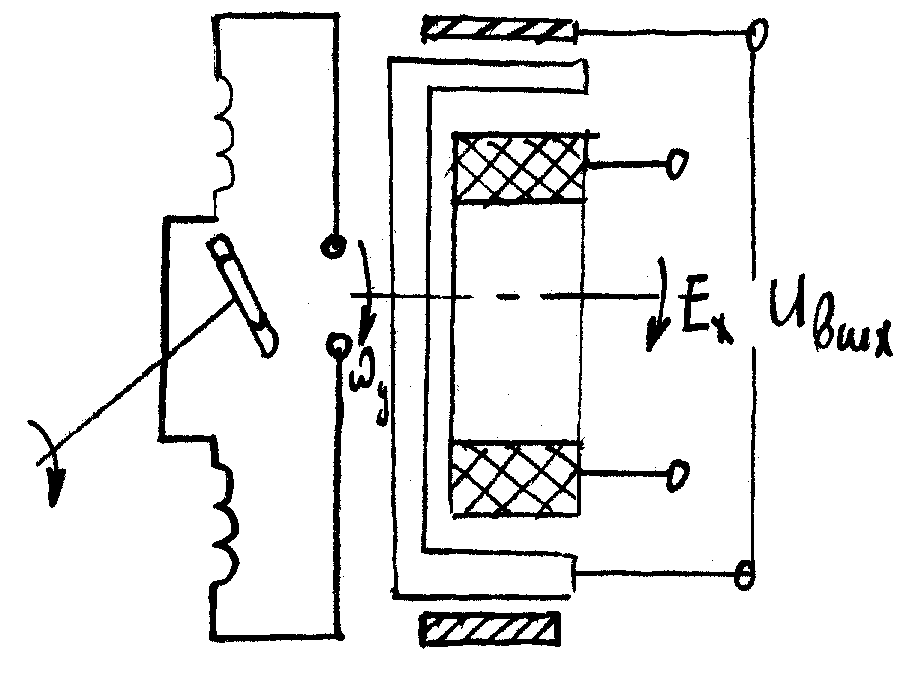
Радиоактивный датчик положения.
источник гамма излучения;
объект;
газоразрядный счётчик;
блок формирования выходных импульсов луча от источника гамма излучения.
В рабочем объёме газоразрядного счётчика каждый гамма квант ионизирует находящийся в нём квант и в цепи протекает импульс тока. С увеличением интенсивности излучения повышается частота импульсов. В блоке 4 формируется частотно – импульсный сигнал таким образом, что на выходе импульсы имеют постоянную длительность.
Выходным сигналом преобразователя является среднее значение импульсного преобразователя:
![]()
τх – период повторения импульсов на выходе.
Преимущества:
имеет стабильную рабочую характеристику;
работает в сложных условиях эксплуатации .
Недостаток – опасен для обслуживающего персонала.
Ультразвуковые и радиолокационные датчики.
Lx = 0.5VτX
V – скорость распространения упругих колебаний
Преимущества:
Высокая точность контроля положения объекта;
Сосредоточенность аппаратуры в одном месте при изменении перемещения на десятки метров;
Возможность работы при неблагоприятных условиях эксплуатации.
Недостаток:
Из – за невозможности использовать излучатель широкой диаграммы ………… поля устойчивости.
Преобразователи скорости и ускорения.
В угольной промышленности применяются преобразователи скорости реализующие операцию дифференциального сигнала линейного или условного перемещения т.е. идёт реализация
![]()
где lX , φX – линейное и угловое перемещение.
Дифференцирование линейного или углового перемещения может осуществляться либо в самом преобразователе либо с использованием дифференциальных звеньев.
Для измерения скорости широко применяют тахогенераторы и индукционные преобразователи.
Для тахогенераторов постоянного тока ЭДС на зажимах зависят от коэффициента усиления и углового перемещения
![]() (1)
(1)
Широко применяются тахогенераторы с возбуждением от постоянного магнитного поля.
 Преимущества:
Преимущества:
Линейная функция преобразования;
Большой диапазон измерения скорости;
Недостаток:
Наличие щёточного коллекторного узла со скользящим контактом и низкая надёжность.
Кроме этого применяются синхронный и асинхронный. Их особенностью
является то, что он не имеет щёточного коллекторного узла.
Синхронный тахогенератор состоит из статора и индуктора выполненного из постоянного магнита. На зажимах статорной обмотки задаётся ЭДС. В соответствии с уравнением (1) по мере изменения ЭДС изменяется частота выходного сигнала по уравнению:
![]()
P – число пар полюсов.
Преимущества:
Выходной сигнал в частотной форме;
Для его использования не требуется применение преобразователя.
У асинхронного тахогенератора в статоре размещена обмотка возбуждения
которая получает питание от сети переменного тока. Внутри статора имеется полый алюминиевый ротор охватывающий обмотку.
При вращении ротора со скоростью ωX, в нём наводятся вихревые токи с частотой сети и величиной пропорциональной угловой скорости вращения. В свою очередь магнитное поле вихревых токов возбуждает ЭДС величина которой определяется из выражения (1) а частота равна частоте напряжения сети и не зависит от угловой скорости вращения ротора.
Недостатки асинхронного тахогенератора:
Для обеспечения заданной точности измерения скорости требуется стабилизация питания напряжения. Он относится к линейному усилительному звену.