

Цифровой компаратор. N-битный цифровой компаратор
Цифровая электроника стр 321
Регистры. Сдвиговые регистры. Блокировка чтения/записи в регистр.
Свои лекции и цифр электроника стр 329 и основы цифр схемот стр 157
Регистр — последовательное или параллельное логическое устройство, используемое для хранения n-разрядных двоичных чисел и выполнения преобразований над ними.
Регистр представляет собой упорядоченную последовательность триггеров, обычно D, число которых соответствует числу разрядов в слове. С каждым регистром обычно связано комбинационное цифровое устройство, с помощью которого обеспечивается выполнение некоторых операций над словами.
Фактически любое цифровое устройство можно представить в виде совокупности регистров, соединённых друг с другом при помощи комбинационных цифровых устройств.
Основой построения регистров являются D-триггеры, RS-триггеры.
Сдвигающие (последовательные) регистры
Последовательные (сдвигающие) регистры представляют собою цепочку разрядных схем, связанных цепями переноса. Основной режим работы — сдвиг разрядов кода от одного триггера к другому на каждый импульс тактового сигнала. В однотактных регистрах со сдвигом на один разряд вправо слово сдвигается при поступлении синхросигнала. Вход и выход последовательные (англ. Data Serial Right, DSR).
Согласно требованиям синхронизации в сдвигающих регистрах, не имеющих логических элементов в межразрядных связях, нельзя применять одноступенчатые триггеры, управляемые уровнем, поскольку некоторые триггеры могут за время действия разрешающего уровня синхросигнала переключиться неоднократно, что недопустимо. Появление в межразрядных связях логических элементов, и тем более, логических схем неединичной глубины упрощает выполнение условий работоспособности регистров и расширяет спектр типов триггеров, пригодных для этих схем. Многотактные сдвигающие регистры управляются несколькими синхропоследовательностями. Из их числа наиболее известны двухтактные с основным и дополнительным регистрами, построенными на простых одноступенчатых триггерах, управляемых уровнем. По такту С1 содержимое основного регистра переписывается в дополнительный, а по такту С2 возвращается в основной, но уже в соседние разряды, что соответствует сдвигу слова. По затратам оборудования и быстродействию этот вариант близок к однотактному регистру с двухступенчатыми триггерами.
Регистры с параллельным и последовательным чтением/записью
В книжках. Лекция 4. И свои лекции.
Принцип работы статических микросхем памяти (SRAM)
Цифр электроника. Интернет
Принцип работы динамических микросхем памяти (DRAM)
Цифр электроника. Интернет
Принцип работы ПЗУ. Адресация данных в памяти.
В обеих основах и цифр электронике. Интернет.
Принцип работы FLASH памяти
Основы схемотехники. Интернет.
Принцип работы и характеристики АЦП, основные виды АЦП
Стр 382 цифр электроника. Основы схемотехники глава 19. Свои лекции. Лекция 7.
Характеристики работы АЦП, шумы квантования, частота дискретизации.
Разрешение АЦП — минимальное изменение величины аналогового сигнала, которое может быть преобразовано данным АЦП — связано с его разрядностью. В случае единичного измерения без учёта шумов разрешение напрямую определяется разрядностью АЦП.
Разрядность
АЦП характеризует количество дискретных
значений, которые преобразователь может
выдать на выходе. В двоичных АЦП измеряется
в битах,
в троичных АЦП измеряется в тритах.
Например, двоичный 8-ми разрядный АЦП,
способен выдать 256 дискретных значений
(0…255), поскольку ![]() ,
троичный 8-ми разрядный АЦП, способен
выдать 6561 дискретное значение, поскольку
,
троичный 8-ми разрядный АЦП, способен
выдать 6561 дискретное значение, поскольку ![]() .
.
Разрешение по напряжению равно разности напряжений, соответствующих максимальному и минимальному выходному коду, делённой на количество выходных дискретных значений.
Ошибки квантования
Ошибки квантования являются следствием ограниченного разрешения АЦП. Этот недостаток не может быть устранён ни при каком типе аналого-цифрового преобразования. Абсолютная величина ошибки квантования при каждом отсчёте находится в пределах от нуля до половины МЗР.
Как
правило, амплитуда входного сигнала
много больше, чем МЗР. В этом случае
ошибка квантования не коррелирована с
сигналом и имеет равномерное
распределение.
Её среднеквадратическое
значение совпадает
с среднеквадратичным
отклонением распределения,
которое равно ![]() .
В случае 8-битного АЦП это составит
0,113 % от полного диапазона сигнала.
.
В случае 8-битного АЦП это составит
0,113 % от полного диапазона сигнала.
Шум квантования — ошибки, возникающие при оцифровке аналогового сигнала. В зависимости от типа аналого-цифрового преобразования могут возникать из-за округления (до определённого разряда) сигнала или усечения (отбрасывания младших разрядов) сигнала.
[править]Математическое описание
[править]Модель
Шум
квантования можно представить как
аддитивный дискретный сигнал ![]() ,
учитывающий ошибки квантования. Если
,
учитывающий ошибки квантования. Если ![]() —
входной сигнал квантователя, а
—
входной сигнал квантователя, а ![]() —
егопередаточная
функция,
то имеем следующую линейную модель шума
квантования:
—
егопередаточная
функция,
то имеем следующую линейную модель шума
квантования:
![]()
Линейная модель используется для аналитического исследования свойств шума квантования.
[править]Детерминированные оценки
Детерминированные оценки позволяют определить абсолютные границы шума квантования:
![]() ,
,
где ![]() —
число разрядов квантования (сигнала
),
—
число разрядов квантования (сигнала
), ![]() —
шаг квантования
—
шаг квантования ![]() —
при округлении
—
при округлении ![]() —
при усечении.
—
при усечении.
[править]Вероятностные оценки
Вероятностные
оценки основаны на представлении ошибок
квантования (сигнала ![]() )
как случайного шумоподобного процесса.
Допущения, вводимые относительно шума
квантования:
)
как случайного шумоподобного процесса.
Допущения, вводимые относительно шума
квантования:
Последовательность является стационарным случайным процессом
Последовательность
не коррелирована с
квантуемым сигналом ![]()
Любые два отсчёта последовательности не коррелированы, то есть шум квантования является процессом типа «белый шум».
Распределение вероятности ошибок квантования является равномерным по диапазону ошибок квантования.
В
таком случае математическое
ожидание ![]() и дисперсия
и дисперсия ![]() шума
квантования определяется следующим
образом (при квантовании
используется дополнительный
код):
шума
квантования определяется следующим
образом (при квантовании
используется дополнительный
код):
![]()
![]()
Частота дискретизации
Аналоговый сигнал является непрерывной функцией времени, в АЦП он преобразуется в последовательность цифровых значений. Следовательно, необходимо определить частоту выборки цифровых значений из аналогового сигнала. Частота, с которой производятся цифровые значения, получила название частота дискретизации АЦП.
Непрерывно меняющийся сигнал с ограниченной спектральной полосой подвергается оцифровке (то есть значения сигнала измеряются через интервал времени T — период дискретизации) и исходный сигнал может быть точно восстановлен из дискретных во времени значений путём интерполяции. Точность восстановления ограничена ошибкой квантования. Однако в соответствии с теоремой Котельникова — Шеннона точное восстановление возможно только если частота дискретизации выше, чем удвоенная максимальная частота в спектре сигнала.
Поскольку реальные АЦП не могут произвести аналого-цифровое преобразование мгновенно, входное аналоговое значение должно удерживаться постоянным по крайней мере от начала до конца процесса преобразования (этот интервал времени называют время преобразования). Эта задача решается путём использования специальной схемы на входе АЦП —устройства выборки-хранения (УВХ). УВХ, как правило, хранит входное напряжение на конденсаторе, который соединён со входом через аналоговый ключ: при замыкании ключа происходит выборка входного сигнала (конденсатор заряжается до входного напряжения), при размыкании — хранение. Многие АЦП, выполненные в виде интегральных микросхемсодержат встроенное УВХ.
АЦП последовательного типа
Лекция 7 цифр электроника 382
АЦП с двойным интегрированием
Лекция 7 цифр электр 382
Сумматор. Полусумматор. Последовательный и параллельный сумматор
Цифр электр. Глава 14. Свои лекции.
Вычитатель. Полувычитатель.
Цифр электр. Глава 14. Свои лекции.
Умножитель. Последовательное и параллельное умножение.
Цифр электр. Глава 14. Свои лекции.
Делитель. Повышение скорости деления чисел.
????????????????????????????
АЛУ. Устройство, команды АЛУ.
Цифр элек. 414. Лекция 13.
Аккумулятор.
Цифр элек. 417. Лекция 13 (середина).
Структура и основные элементы микропроцессора (на примере 8086, SAB 8080A или аналога)
Цифр элек. Глава 15.
Структура и основные элементы микроконтроллера (на примере ATmega128, ATTiny2313). Отличия микроконтроллера от микропроцессора.
Свои лекции. Лекция 16. Интернет. Угрюмов 252.
Назначение сторожевого таймера в микроконтроллере. Если, несмотря на все принятые меры, МК все же «завис», то на случай выхода из этого состояния все современные контроллеры имеют встроенный модуль сторожевого таймера. Принцип действия сторожевого таймера показан на рис. 4.11.
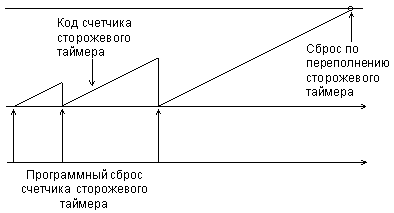 Рис.
4.11.
Принцип действия сторожевого
таймера.
Основу сторожевого
таймера составляет
многоразрядный счетчик. При сбросе МК
счетчик обнуляется. После перехода МК
в активный режим работы значение
счетчика начинает увеличиваться
независимо от выполняемой программы.
При достижении счетчиком максимального
кода генерируется сигнал внутреннего
сброса, и МК начинает выполнять рабочую
программу сначала.
Для
исключения сброса по переполнению сторожевого
таймера рабочая
программа МК должна периодически
сбрасывать счетчик. Сброс счетчикасторожевого
таймера осуществляется
путем исполнения специальной команды
(например, CLRWDT) или посредством записи
некоторого указанного кода в один из
регистров специальных функций. Тогда
при нормальном, предусмотренном
разработчиком, порядке исполнения
рабочей программы переполнения
счетчика сторожевого
таймера не
происходит, и он не оказывает влияния
на работу МК. Однако, если исполнение
рабочей программы было нарушено,
например, вследствие «зависания», то
велика вероятность того, что счетчик
не будет сброшен вовремя. Тогда произойдет
сброс по переполнению сторожевого
таймера,
и нормальный ход выполнения рабочей
программы будет восстановлен.
Модули сторожевых
таймеров конкретных
МК могут иметь различные особенности:
Рис.
4.11.
Принцип действия сторожевого
таймера.
Основу сторожевого
таймера составляет
многоразрядный счетчик. При сбросе МК
счетчик обнуляется. После перехода МК
в активный режим работы значение
счетчика начинает увеличиваться
независимо от выполняемой программы.
При достижении счетчиком максимального
кода генерируется сигнал внутреннего
сброса, и МК начинает выполнять рабочую
программу сначала.
Для
исключения сброса по переполнению сторожевого
таймера рабочая
программа МК должна периодически
сбрасывать счетчик. Сброс счетчикасторожевого
таймера осуществляется
путем исполнения специальной команды
(например, CLRWDT) или посредством записи
некоторого указанного кода в один из
регистров специальных функций. Тогда
при нормальном, предусмотренном
разработчиком, порядке исполнения
рабочей программы переполнения
счетчика сторожевого
таймера не
происходит, и он не оказывает влияния
на работу МК. Однако, если исполнение
рабочей программы было нарушено,
например, вследствие «зависания», то
велика вероятность того, что счетчик
не будет сброшен вовремя. Тогда произойдет
сброс по переполнению сторожевого
таймера,
и нормальный ход выполнения рабочей
программы будет восстановлен.
Модули сторожевых
таймеров конкретных
МК могут иметь различные особенности:
в ряде МК векторы внешнего сброса и сброса по переполнению сторожевого таймера совпадают. Это не позволяет выявить причину сброса программным путем и затрудняет написание рабочей программы. Более высокоуровневые МК имеют либо различные векторы сброса, либо отмечают событие сброса по переполнению сторожевого таймера установкой специального бита в одном из регистров специальных функций;
в некоторых МК при переходе в один из режимов пониженного энергопотребления, когда рабочая программа не выполняется, автоматически приостанавливается работа сторожевого таймера. В других МК сторожевой таймер имеет независимый тактовый генератор, который продолжает функционировать и в режиме ожидания. В этом случае необходимо периодически выводить МК из состояния ожидания для сбросасторожевого таймера. В PIC-контроллерах фирмы Microchip выработка таких сбросов может быть запрещена путем записи нуля в специальный бит конфигурации WDTE.
Использование сторожевого таймера существенно повышает способность к самовосстановлению системы на основе МК.