

Вопрос 32) Линейный режим работы поворотного трансформатора.
Известно, что синус малого угла равен самому углу. Поэтому с погрешность 0,1% можно считать, что СКПТ обеспечит линейную зависимость U = ka в диапазоне a = ±4,5о. Если допустить погрешность 1%, диапазон увеличится доa= ±14о. Однако в гораздо более широком интервале углов линейную зависимость U = ka реализует функция
![]()
При k = 0,5 ее можно представить в виде степенного ряда
члены которого быстро убывают. С погрешность 1% можно ограничиться только линейным коэффициентом этого ряд в диапазоне углов ±60о.
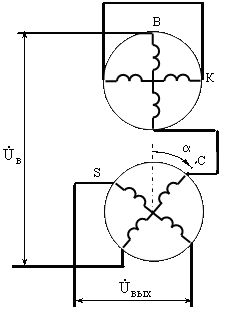
Рис.1. Схема ЛПТ с первичным симметрированием
Подбором коэффициента в пределах k = 0,52¸0,56 точность аппроксимации можно довести до 99, 9% в диапазоне углов ±55о.
Наиболее распространенная схема линейного поворотного трансформатора представлена на рис.1, из которой видно, что это схема с первичным симметрированием. Следовательно, можно принять Фq = 0 и при анализе процессов в ПТ учитывать только продольный поток Фd.
Если пренебречь внутренним падением напряжения в обмотках

Отсюда
Выходной сигнал

Из последней формулы видно, что при проектировании СКПТ следует коэффициент трансформации выбирать в пределах 0,52¸0,56.
Вопрос 33.Поворотный трансформатор-построитель
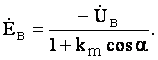
Схему поворотного трансформатора-построителя, показанную на рис. 1, применяют для определения гипотенузы (как по величине, так и по углу) прямоугольного треугольника по двум заданным катетам. Обмотки статора сс и сс присоединяют к однофазной сети через делитель напряжения R, позволяющий устанавливать навходе обмоток требуемые величины напряжений Uci и Us,. На зажимы одной из роторных обмоток подключают вольтметр, шкала которого при необходимости градуируется непосредственно в линейных мерах. Вторая роторная обмотка питает обмотку управления У исполнительного асинхронного двигателя ЯД. Обмотку возбуждения В этого двигателя подключают через конденсатор к той же сети, что и статорные обмотки поворотного трансформатора. Роторы исполнительного двигателя и поворотного трансформатора связаны механически через редуктор. Схема работает следующим образом. Требуется определить гипотенузу а прямоугольного треугольника (рис. 2, а) по известным катетам и с. Эти катеты задаем в схему в виде напряжений f/ei и С/сг. приложенных к обмоткам поворотного трансформатора:

Рис. 1. Схема поворотного трансформатора-построителя
М. д. с. обмоток CiCa и С3С4 создают неподвижные в пространстве, пульсирующие по осям обмоток магнитные потоки Ф и (рис2,6).модули которых при отсутствии насыщения магнитопровода будут пропорциональны вызвавшим их напряжениям Ui и f/c2- В результате геометрического сложения этих потоков возникает результирующий магнитный поток Ф3, расположенный в пространстве относительно обмоток сс и СдС* под теми же углами, что и гипотенуза а исходного треугольника. Очевидно, что величины
 Рис.
2. Пространственная диаграмма потоков
в поворотном трансформаторе-построителе
Рис.
2. Пространственная диаграмма потоков
в поворотном трансформаторе-построителе
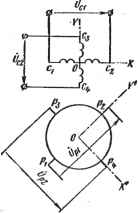
Рис. 3. Поворотный трансформатор как преобразователь координат
потоков Фс1< Фс2, Фа пропорциональны сторонам Cji, Са и а треугольника. Магнитный поток Ф наводит в обмотках ротора э. д. с. £р, и £р2.
Э. д. с. Ера обмотки рзР4 создает на зажимах обмотки управления исполнительного двигателя напряжение U. Ротор двигателя начинает вращаться и через редуктор поворачивать ротор поворотного трансформатора. Когда обмотка рр займет положение, при котором ее ось будет перпендикулярна оси магнитного потока Фд, э. д. с. этой обмотки станет равной нулю и ротор исполнительного двигателя остановится. При этом ось обмотки рр совпадет С осью потока Фд и вольтметр покажет напряжение максимально возможной величины, которое и будет пропорционально гипотенузе а исходного треугольника. Угол поворота ротора будет определять угловое положение гипотенузы относительно катетов.
Выполненная поворотным трансформатором операция соответствует определению величины вектора и его аргумента по заданным составляющим в прямоугольной (декартовой) системе координат. Это означает, что поворотный трансформатор-построитель может выполнять преобразование от декартовых к полярным координатам.
С помощью поворотного трансформатора можно легко решатьзадачу преобразования от одной декартовой системы координат к другой при прврроте их осей (рис. 3). Совместим оси координат ОХ и 0Y исходной системы с обмотками статора, а повернутую на угол 9 систему координат ОХ и 0Y - с осями обмоток ротора. При подаче на обмотки статора сс и сс напряжений Ux и значения напряжений на обмотках ротора будут определяться взаимоиндукцией с обеими статорными обмотками. Можно записать
fpi=£7 (с1 sin е -ьcos е);
tp2=t7 (ci cos e - L/ sin e).
Полученные соотношения дают с точностью до масштабного коэффициента известные формулы преобразования координат. Следует отметить, что симметрирование поворотного трансформатора в схеме построителя осуществляется за счет того, что каждая статорная обмотка- является не только индуктирующей по отношению к обмоткам ротора, но и компенсирующей по отношению к другой статорной обмотке.