

26.Автонастройка электропривода переменного тока. Идентификация, адаптация. Силовая схема. Элементы системы векторного управления.
Автоматическая настройка в системах управления асинхронного электропривода включает в себя внедрение преобразователей частоты, которые включают в свои функциональные возможности самонастройку регуляторов (автонастройка).
Для проведения автонастройки необходимо знать паспортные данные устанавливаемого двигателя. Затем в преобразователе выбирается режим автонастройки и после подачи команды запуска, процесс автонастройки системы запускается. Процесс длится 75 с и состоит из трех равных интервалов по 25 с. На первом интервале на каждую фазу двигателя последовательно подается постоянное напряжение, при этом ток нарастает ступенчато до 72% и затем до 92% от номинального тока двигателя. Полученные данные о величине и характере изменения тока позволяют определить значение активного сопротивления статора двигателя, а также провести настройку регуляторов тока преобразователя. На втором интервале ток в фазах А,В и С – синусоидальный с амплитудой 5% Iн двигателя, с частотой 4 Гц и смещен относительно нулевой оси на 15% Iн. Такой вид тока выбран с целью недопущения вращения оси ротора асинхронного двигателя. Полученные данные о токе могут быть использованы для нахождения значений индуктивностей статора и ротора, а также взаимной индуктивности. Третий интервал – ток в фазах А, В и С – синусоидальный с амплитудой 2.5% Iн двигателя, частотой 8 Гц и смещен относительно нулевой оси на 70% Iн. При этом ось ротора асинхронного двигателя остается неподвижной. Информация о токе используется для уточнения рассчитываемых значений индуктивности статора и ротора, а также взаимной индуктивности.
После проведения автонастройки и определения параметров двигателя, настраивается математическая модель асинхронного двигателя. В процессе проведения автонастройки определяются следующие параметры: активное сопротивление ротора, индуктивное сопротивление ротора, индуктивность рассеяния двигателя, коэффициенты регулятора тока и т.д.
Существуют следующие виды автонастройки:
1)Автонастройка без вращения – применяется только для векторного управления.
2)Автанастройка без вращения - служит для определения межфазного сопротивления. Может применятся в любом режиме регулирования. Такая настройка может использоваться для улучшения характеристик регулирования при большой длине кабеля, при изменении длины кабеля, а также в случае, когда двигатель и инвертор различаются по мощности.
Идентификация системы управления:

Векторное управление:
• Векторное регулирование магнитного потока
• Управление, ориентированное по полю
• Управление по вектору главного потокосцепления двигателя
• Управление по вектору потокосцепления статора
• Управление по вектору потокосцепления ротора
• Частотно-токовое векторное управление
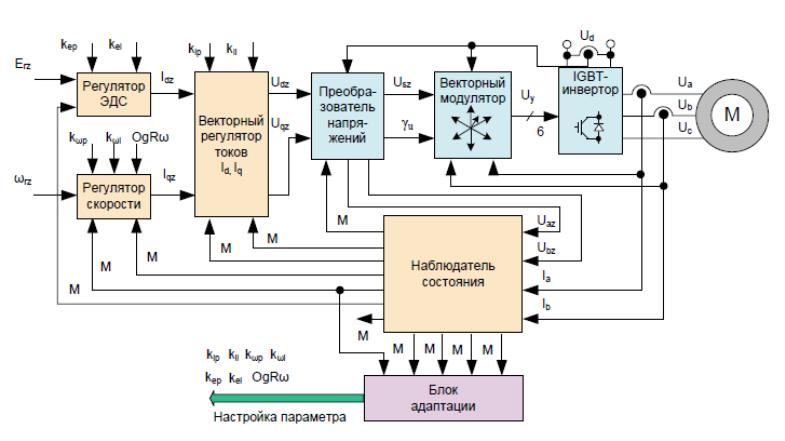
Элементы системы векторного управления:
27. Одно- и двухфазные асинхронные двигатели. Передаточные функции и структурные схемы двухфазного асинхронного двигателя.
Однофазные асинхронные двигатели - машины небольшой мощности, которые по конструктивному исполнению напоминают аналогичные трехфазные электродвигатели с короткозамкнутым ротором.
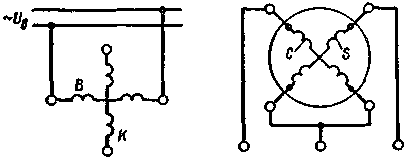
Однофазные асинхронные двигатели отличаются от трехфазных двигателей устройством статора, где в пазах магнитопровода находится двухфазная обмотка, состоящая из основной, или рабочей, фазы с фазной зоной 120 эл. град и выводами к зажимам с обозначениями С1 и С2, и вспомогательной, или пусковой, фазы с фазной зоной 60 эл. град и выводами к зажимам с обозначениями В1 и В2 (рис. 1).
Магнитные оси этих фаз обмотки смещены относительно друг друга па угол 0 = 90 эл. град. Одна рабочая фаза, присоединенная к питающей сети переменного напряжения, не может вызвать вращения ротора, так как ток ее возбуждает переменное магнитное поле с неподвижной осью симметрии, характеризуемое гармонически изменяющейся во времени магнитной индукцией.
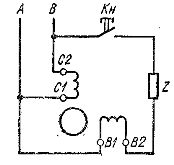
Рис. 1. Схема включения однофазного асинхронного двигателя с короткозамкнутым ротором.
Это поле можно представить двумя составляющими - одинаковыми круговыми магнитными полями прямой и обратной последовательностей, вращающимися с магнитными индукциями, вращающимися в противоположные стороны с одной и той же скоростью. Однако при предварительном разгоне ротора в необходимом направлении он при включенной рабочей фазе продолжает вращаться в том же направлении.
По этой причине пуск однофазного двигателя начинают с разгона ротора путем нажатия пусковой кнопки, вызывающего возбуждение токов в обеих фазах обмотки статора, которые сдвинуты по фазе на величину, зависящую от параметров фазосдвигающего устройства Z, выполненного в виде резистора, индуктивной катушки или конденсатора, и элементов электрических цепей, в которые входят рабочая и пусковая фазы обмотки статора. Эти токи побуждают в машине вращающееся магнитное поле с магнитной индукцией в воздушном зазоре, которая периодически и монотонно изменяется в пределах максимального и минимального значений, а конец ее вектора описывает эллипс.
Это эллиптическое вращающееся магнитное поле находит в проводниках короткозамкнутой обмотки ротора ЭДС и токи, которые, взаимодействуя с этим полем, обеспечивают разгон ротора однофазного двигателя в направлении вращения поля, и он в.течение нескольких секунд достигает почти номинальной скорости.
Отпускание пусковой кнопки переводит электродвигатель с двухфазного режима на однофазный, поддерживаемый в дальнейшем соответствующей составляющей переменного магнитного поля, которая при своем вращении несколько опережает вращающийся ротор из-за скольжения.
Своевременное отключение пусковой фазы обмотки статора однофазного асинхронного двигателя от питающей сети необходимо в связи с ее конструктивным исполнением, предусматривающим кратковременный режим работы - обычно до 3 с, что исключает длительное пребывание ее под нагрузкой в связи с недопустимым перегревом, сгоранием изоляции и выходом из строя.
Повышение надежности эксплуатации однофазных асинхронных двигателей обеспечивают встраиванием в корпус машин центробежного выключателя с размыкающими контактами, присоединенными к зажимам с обозначениями ВЦ и В2, и теплового реле с аналогичными контактами, имеющими выводы с обозначениями РТ и С1 (рис. 2, в, г).
Центробежный выключатель автоматически отключает пусковую фазу обмотки статора, присоединенную к зажимам с обозначениями В1 и В2 при достижении ротором скорости, близкой к номинальной, а тепловое реле — обе фазы обмотки статора от питающей сети, когда нагрев их окажется выше допустимого.
Перемена направления вращения ротора достигается изменением направления тока в одной из фаз обмотки статора при пуске путем переключения пусковой кнопки и перестановки металлической пластины на зажимах электродвигателя (рис. 2, а, б) или только перестановкой двух аналогичных пластин (рис. 2, в, г).
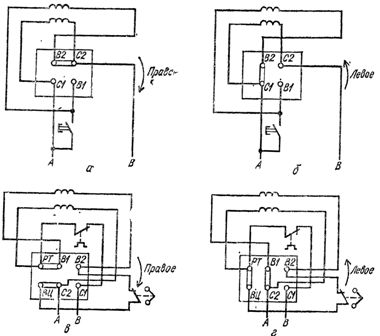
Рис. 2. Маркировка зажимов фаз обмотки статора однофазного асинхронного двигателя с короткозамкнутым ротором и их соединение для вращения ротороа: а, в - правого, б, г - левого.
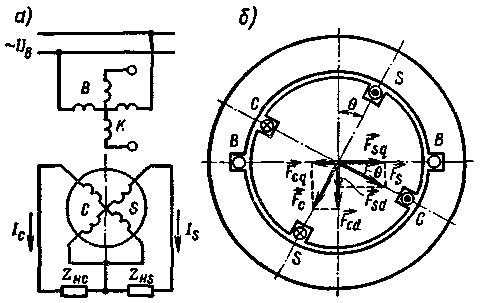
Двухфазные асинхронные двигатели
В двухфазных асинхронных двигателях обе фазы обмотки статора с фазными зонами по 90 эл. град являются рабочими. Они расположены в пазах магнитопровода статора так, что их магнитные оси образуют угол 90 эл. град. Эти фазы обмотки статора отличаются друг от друга не только числом витков, но и номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы.
В одной из фаз обмотки статора постоянно находится конденсатор Ср (рис. 3, а), который в условиях номинального режима двигателя обеспечивает возбуждение кругового вращающегося магнитного поля. Емкость этого конденсатора определяют по формуле:
Cр = I1sinφ1 / 2πfUn2
где I1 и φ1- соответственно ток и сдвиг фаз между напряжением и током цепи фазы обмотки статора без конденсатора при круговом вращающемся магнитном поле,
I и U - соответственно частота переменного тока и напряжение питающей сети, n-коэффициент трансформации - отношение эффективных чисел витков фаз обмотки статора соответственно с конденсатором и без него, определяемое по формуле
n = kоб2 w2 / kоб1 w1
где kоб2 и kоб1 - обмоточные коэффициенты соответствующих фаз обмотки статора с числом витков w2 и w1.
Напряжение на зажимах конденсатора Uc, включенного последовательно с фазой обмотки статорадвухфазного асинхронного двигателя, при круговом вращающемся магнитном поле выше напряжения сети U и определяется так:
Uc = U √1 + n2
Переход к нагрузке двигателя, отличной от номинальной, сопровождается изменением вращающегося магнитного поля, которое вместо кругового становится эллиптическим. Это ухудшает рабочие свойства двигателя, а при пуске снижает начальный пусковой момент до Мп < 0,3Mном, ограничивая этим применение двигателей с постоянно включенным конденсатором только в установках с легкими условиями пуска.
Для повышения начального пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Сп (рис. 3, б), емкость которого намного больше емкости рабочего конденсатора и зависит от кратности начального пускового момента, которая может быть доведена до двух и более.

Рис. 3. Схемы включения двухфазных асинхронных двигателей с короткозамкнутым ротором: а - спостоянно присоединенным конденсатором, б - с рабочим и пусковым конденсаторами.
После разгона ротора до скорости 0,6 - 0,7 номинальной пусковой конденсатор отключают для избежания перехода кругового вращающегося магнитного поля в эллиптическое, ухудшающее рабочие характеристики двигателя.
Пусковой режим таких конденсаторных двигателей характеризуется такими показателями: kп = 1,7 - 2,4 и ki = 4 - 6.
Конденсаторные двигатели отличаются лучшими энергетическими показателями, чем однофазные двигатели с пусковой фатой обмотки статора, я коэффициент мощности их, благодаря применению конденсаторов, выше, чем у трехфазных двигателей одинаковой мощности.
Вопрос №30
Асинхронный тахогенератор
Ответ:
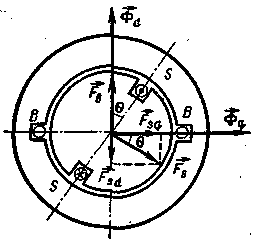
Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой - генераторной обмотки (ГО) снимается выходное напряжение (рис. 1).
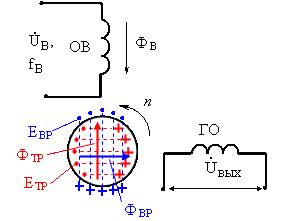
Рис. 1. К вопросу о принципе действия асинхронного тахогенератора
Принцип действия асинхронного тахогенератора заключается в следующем. (Для упрощения качественного анализа примем полый ротор состоящим из конечного числа витков, замкнутых на торцах).
При питании обмотки возбуждения переменным током частоты fВ возникает пульсирующий магнитный поток ФВ, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС - ЕТ (показана внутри ротора) и ЭДС вращения - ЕВР(показана снаружи ротора). В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток ФТР, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку ФТР, он не будет индуцировать в ней никакой ЭДС.
В контурах, параллельных оси обмотки возбуждения, но теперь уже под действием ЭДС вращения тоже протекают токи, которые создают свой поток ФВР. Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС.
Если принять, что магнитный поток возбуждения является гармонической функцией времени ф = Фmsin(w1t), то мгновенное значение ЭДС вращения будет евр = сеФmsin(w1t)n. Ток, созданный этой ЭДС, i = eвр/rр = cе/rр*Фmsin(w1t)n. (Индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току фвр = kфi = kфcе/rр*Фmsin(w1t)n. Тогда мгновенное значение выходной ЭДС будет е = -WГdфвр/dt = -WГkфcе/rр*Фmw1cos(w1t)n = Еmsin(w1t - 900). Угловая частота сети w1 = 2pf. Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет
![]()
Таким образом, величина выходной ЭДС асинхронного тохогенератора пропорциональна угловой скорости вращения, а ее частота равна частоте сети возбуждения.
При подключении нагрузки выходное напряжение UГ станет меньше ЭДС ЕГ на величину внутреннего падения напряжения IГZГ
![]()
В общем случае асинхронный тахогенератор (АТГ) представляет несимметричную двухфазную машину, которую можно исследовать методом симметричных составляющих, что приводит к следующему выражению выходной характеристики
где: k = WЭГ/WЭВ - коэффициент трансформации АТГ; - напряжение возбуждения; n = n/n1 - относительная частота вращения; - комплексные коэффициенты, зависящие от величины и характера нагрузки ZН, от параметров схемы замещения АТГ.
Как следует из выражения , выходное напряжение UГ не является линейной функцией относительной угловой скорости вращения n. Нелинейность создает квадратичная зависимость Вn2. Если Вn2 = 0, то UГ становится пропорциональным n, а тахогенератор считается идеальным. При проектировании АТГ выражение Вn2стремятся уменьшить как за счет уменьшения n так и за счет уменьшения В.
Так как n1 = 60f/р, то с целью уменьшения n тахогенераторы проектируют на большую частоту f. Правда при этом не уменьшают р, поскольку при р > 1, слабее проявляется магнитная несимметрия машины. Обычно р = 2.
Комплексный коэффициент В :

где ZCB - полное сопротивление обмотки возбуждения статора АТГ. Ясно, что с увеличением rP, коэффициент В будет уменьшаться. Вот почему ротор АТГ выполняют из материала с высоким удельным сопротивлением (фосфористой или марганцевой бронзы, манганина и др.)! Повышению линейности выходной характеристики способствует и работа при больших сопротивлениях нагрузки ZH. К уменьшению k и ZCB обычно не прибегают т.к. первое снижает крутизну выходной характеристики, а второе - увеличивает габариты АТГ.
Вопрос №31. Синусно-косинусный вращающийся трансформатор. Первичное и вторичное симметрирование.
Выходные напряжения. На статоре этого трансформатора расположены обмотки В и К, а на роторе — обмотки S и С (см. рис. 1).
Рис. 1. Принципиальная схема четырехобмоточного вращающегося трансформатора |
|
При холостом ходе напряжения на синусной S и косинусной С обмотках ротора равны соответствующим ЭДС:
US0 = ES0 = kЕв sin θ; UC0 = EC0 = kЕв cos θ,
т.е. изменяются по требуемым законам. Аналогичный режим работы возникает в случае, когда нагрузка синуснокосинусного
|
Рис. 2. Векторная диаграмма МДС при подключении нагрузки к синусной обмотке |
трансформатора представляет собой электронное устройство с большим входным сопротивлением.
Если к синусной обмотке S подключить некоторую нагрузку Zн S , то по обмотке пойдет ток
ÍS = ÉS /(ZS + ZнS ),
где ZS — сопротивление обмотки S, которое считаем постоянным.
Ток IS создает МДС ротора FS . Как видно из рис. 2, ось этой МДС совпадает с осью фазы S , поэтому ее можно представить в виде суммы двух составляющих: продольной FSd = FS sin θ и поперечной FSq = FS cos θ. Продольная составляющаяFSd создает в обмотке возбуждения В компенсирующий ток, МДС которого Fв , так же как и в двухобмоточном трансформаторе, компенсирует действие FSd . Результирующий продольный поток Фd индуцирует ЭДС в обмотке S
ESd = kEв sinθ.
Поперечная составляющая FSq создает во вращающемся трансформаторе поперечный поток Фq. Относительно поперечного потока Фq обмотка S является косинусной и, следовательно, в ней индуцируется ЭДС
ESq = 4,44f1 w2 ko62 Фqm cos θ = CFS cos2 θ,
где С — постоянная.
Таким образом, при нагрузке в синусной обмотке кроме требуемой ЭДС, пропорциональной синусу угла поворота θ, индуцируется ЭДС, пропорциональная току нагрузки и квадрату косинуса θ. Эта добавочная составляющая ЭДС вызывает появление погрешностей. Аналогично в косинусной обмотке при нагрузке поперечным потоком Фq индуцируется добавочная ЭДС ECq , пропорциональная току нагрузки и квадрату синуса θ, которая также вызывает появление погрешностей.
Для устранения погрешности вращающегося трансформатора, обусловленной поперечным потоком Фq , применяют так называемое симметрирование трансформатора, т. е. компенсацию поперечного потока ротора. Существует два способа симметрирования: вторичное (со стороны ротора) и первичное (со стороны статора).
|
Рис. 3. Схема синусно-косинусного трансформатора со вторичным симметрированием и диаграмма МДС, создаваемых обмотками ротора |
Вторичное симметрирование. Для уменьшения погрешности выходного напряжения, снимаемого с синусной обмотки, подключают к косинусной обмотке сопротивление ZнС (рис. 3, а). В этом случае ток, проходящий по обмотке С, создает МДС FС , которую можно представить, так же как и МДС FS , в виде векторной суммы двух составляющих (рис. 3,б): продольной FСd = FС cos θ и поперечной FCq = FС sin θ. Продольная составляющая FCd совпадает по направлению с FSd , a поперечная составляющая FCq направлена против FSq . При FCq = FSqпоперечный поток Фq = 0. Следовательно, не возникает и погрешность, обусловленная этим потоком. Сопротивление ZнС, при котором обеспечено полное симметрирование, можно определить из условия
FS cos θ = FC sin θ
или с учетом значений FS и FC
ZS + ZнS = ZC + ZнC ,
т. е. полное симметрирование наблюдается при равенстве комплексных сопротивлений в цепи обмоток S и С ротора, т. е. их активных и реактивных составляющих. При вторичном симметрировании компенсируются МДС по поперечной оси; кроме того, ток Iв в обмотке возбуждения поворотного трансформатора не зависит от угла поворота, так как в формулу для результирующей продольной составляющей МДС ротора F́2d = F́Sd + F́Cd (определяющей силу тока Iв) не входит какаялибо функция угла θ:
F́2d = F́S sin θ + F́C cos θ = |
|
sin θ + |
|
cos θ = |
|
Éв , |
где Z2 = ZS = ZC ; Zн = ZнS = ZнC .
В результате уменьшается погрешность поворотного трансформатора.
Рассмотренный метод симметрирования практически применим только при постоянном сопротивлении нагрузки, что является его недостатком.
Первичное симметрирование. Для уменьшения погрешности выходного напряжения снимаемого, например, с обмотки S (рис. 4, а), компенсационную обмотку К статора замыкают на какое-либо малое сопротивление ZK или накоротко. В этом случае по поперечной оси вращающегося трансформатора действует результирующая МДС
Fq = FSq + FK ,
где FK — МДС, создаваемая компенсационной обмоткой.
Так как обмотка К относительно поперечного потока Фq представляет собой замкнутую накоротко вторичную обмотку трансформатора, то ее МДС F́K направлена против МДС F́Sq«первичной» обмотки, и результирующая МДС Fq , так же как и в трансформаторе тока, значительно
|
Рис, 4. Схемы синусно-косинусных вращающихся трансформаторов |
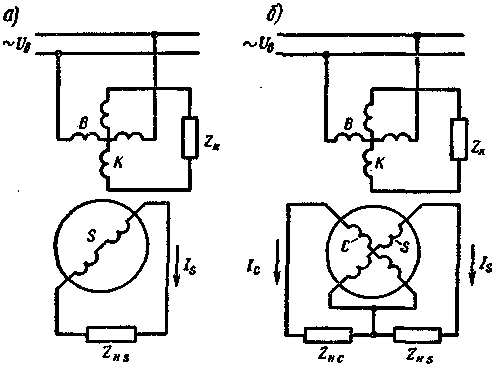
меньше МДС FSq . Поэтому поперечный поток Фq и вызванная им погрешность резко уменьшаются. При изменении нагрузки, подключенной к обмотке ротора, МДС FK изменяется примерно пропорционально МДС FSq , вследствие чего степень компенсации поперечного потока остается практически неизменной. Это является достоинством данного метода симметрирования. Однако при изменении угла поворота ротора θ изменяется ток Iв в обмотке возбуждения и при заданном напряжении Úв изменяется ЭДС Éв . В результате появляется дополнительная погрешность в значении выходных напряжений ÚS и ÚC на зажимах синусной и косинусной обмоток. Поэтому во вращающихся трансформаторах обычно применяют одновременно первичное и вторичное симметрирование (рис.4,б). Рассмотренные методы компенсации поперечного потока Фq позволяют использовать в качестве выходной как синусную, так и косинусную обмотки. Поэтому вращающийся трансформатор, включенный по схеме, изображенной на рис. 4,б, называют синусно-косинусным.