

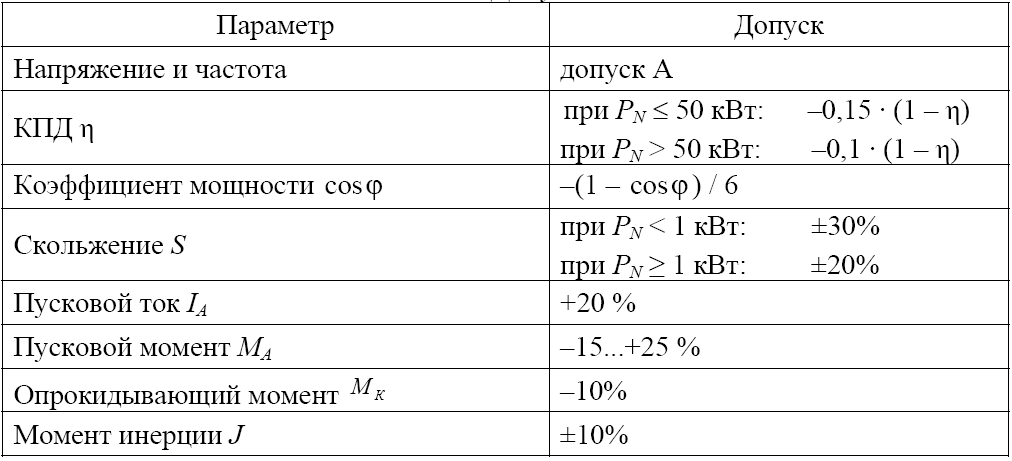
Допуски Таблица 1
В соответствии с действующим стандартом существуют три
основных номинальных режима работы электрических машин,
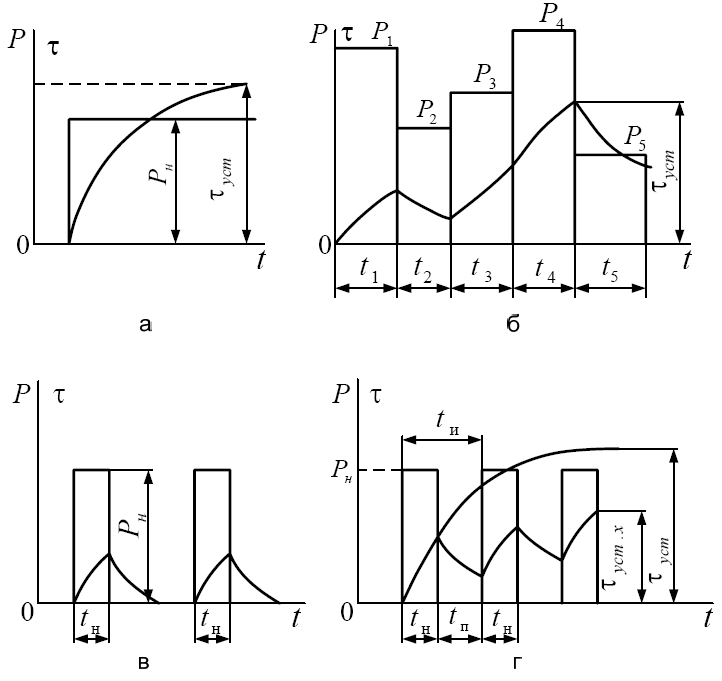
Продолжительный номинальный режим – когда при неизменной номи-
нальной нагрузке Pн работа машины продолжается так долго, что температура
всех ее частей успевает достигнуть установившихся значений τуст. Условное
обозначение режима S1. Различают продолжительный режим с неизменной на-грузкой P = const (рис. 2, а) и продолжительный режим с изменяющейся на-грузкой (рис. 2, б).
Кратковременный номинальный режим S2 – когда периоды неизменной
номинальной нагрузки чередуются с периодами включения двигателя
(рис. 2, в).
В условном обозначении кратковременного режима указывается продолжительность периода нагрузки, например S2– 30 мин. В кратковременном режиме работают приводные двигатели шлюзов, разного рода заслонок и других запорных устройств, регулирующих подачу рабочего вещества через трубопроводы к объекту потребления.
Повторно-кратковременный номинальный режим S3 – когда кратковре-
менные периоды номинальной нагрузки двигателя tн чередуются с периодами
отключения двигателя (паузами), причем за период нагрузки превышение тем-
пературы всех частей не успевает достигнуть установившихся значений, а за
время паузы части двигателя не успевают охладиться до температуры окру-
жающей среды. Общее время работы двигателя в повторно-кратковременном
режиме разделяется на периодически повторяющиеся циклы. При повторно-
кратковременном режиме график нагревания двигателя имеет вид пилообраз-
ной кривой (рис. 2, г). Температура двигателя колеблется от τmin до τmax .
Основные номинальные режимы работы Рис. 2
(17 вопрос) Синхронные двигатели. Конструкция, принцип действия
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы).
В статоре синхронного электродвигателя размещается обмотка, подключаемая к сети трехфазного тока и образующая вращающееся магнитное поле. Ротор двигателя состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор.
Роторы синхронных машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). На рис. 1а изображен сердечник 1 явнополюсного ротора с выступающими полюсами. На полюсах размещены катушки возбуждения 2. На рисунке 1б изображен неявнополюсной ротор, представляющий собой ферромагнитный цилиндр 1. На поверхности ротора в осевом направлении фрезеруют пазы, в которые укладывают обмотку возбуждения 2.

Рис. 1
Рассмотрим принцип работы синхронного двигателя на модели (рис.2) Вращающееся магнитное поле статора представим в виде магнита 1. Намагниченный ротор изобразим в виде магнита 2. Повернем магнит 1 на угол α. Северный магнитный полюс магнита 1 притянет южный полюс магнита 2, а южный полюс магнита 1 - северный полюс магнита 2. Магнит 2 повернется на такой же угол α. Будем вращать магнит 1. Магнит 2 будет вращаться вместе с магнитом 1, причем частоты вращения обоих магнитов будут одинаковыми, синхронными,
n2 = n1.
Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем.
Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы.

Рис.2
Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора.
Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора.
С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма.
У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
В настоящее время применяется асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка.
Вращающее магнитное поле статора индуктирует в короткозамкнутой пусковой обмотке вихревые токи. При взаимодействии этих токов с магнитным полем статора образуется асинхронный электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приближается к частоте вращения статорного поля, двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Вопрос№ 19
Режимы работы трехфазного асинхронного двигателя.
Ответ:
Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую.
 Рис.
6
Рис.
6
Пусть обмотка статора создаёт магнитное поле, вращающееся с частотой n0 в указанном направлении (рис. 6). Это поле будет наводить согласно закону электромагнитной индукции в обмотке ротора ЭДС. Направление ЭДС определяется по правилу правой руки и показано на рисунке (силовые линии должны входить в ладонь, а большой палец нужно направить по направлению движения проводника, т.е. ротора, относительно магнитного поля). В обмотке ротора появится ток, направление которого примем совпадающим с направлением ЭДС. В результате взаимодействия обмотки ротора с током и вращающегося магнитного поля возникает электромагнитная сила F. Направление силы определяется по правилу левой руки (силовые линии должны входить в ладонь, четыре пальца – по направлению тока в обмотке ротора). В данном режиме (рис. 6) электромагнитная сила создаст вращающий момент, под действием которого ротор начнёт вращаться с частотой n. Направление вращения ротора совпадает с направлением вращения магнитного поля. Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения магнитного поля. Для реверса двигателя нужно изменить порядок чередования фаз подведённого напряжения, т.е. переключить две фазы.
Пусть под действием электромагнитного момента ротор начал вращаться с частотой вращения магнитного поля (n=n0). При этом в обмотке ротора ЭДС E2 будет равна нулю. Ток в обмотке ротора I2=0, электромагнитный момент M тоже станет равным нулю. За счёт этого ротор станет вращаться медленнее, в обмотке ротора появится ЭДС, ток. Возникнет электромагнитный момент. Таким образом, в режиме двигателя ротор будет вращаться несинхронно с магнитным полем. Частота вращения ротора будет изменяться при изменении нагрузки на валу. Отсюда появилось название двигателя – асинхронный (несинхронный). При увеличении нагрузки на валу двигатель должен развивать больший вращающий момент, а это происходит при снижении частоты вращения ротора. В отличие от частоты вращения ротора частота вращения магнитного поля не зависит от нагрузки. Для сравнения частоты вращения магнитного поля n0 и ротора n ввели коэффициент, который назвали скольжением и обозначили буквой S. Скольжение может измеряться в относительных единицах и в процентах.
S=(n0−n)/n0 или S=[(n0−n)/n0]100%.
При пуске в ход асинхронного двигателя n=0,S=1. В режиме идеального холостого хода n=n0,S=0. Таким образом, в режиме двигателя скольжение изменяется в пределах:
0<S≤1.
При работе асинхронных двигателей в номинальном режиме:
Sн=(2÷5)%.
В режиме реального холостого хода асинхронных двигателей:
Sхх=(0,2÷0,7)%.
Режим генератора
Этот режим служит для преобразования механической энергии в электрическую, т.е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию. Асинхронная машина переходит в режим генератора, если ротор начинает вращаться быстрее магнитного поля (n>n0). Этот режим может наступить, например, при регулировании частоты вращения ротора.
Пусть n>n0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента (рис. 7). Машина начинает развивать на валу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т.е. направление передачи электрической энергии).
 Рис.
7
Рис.
7
При n>n0,S=0.
При n→+∞,S→−∞.
Таким образом, в режиме генератора скольжение изменяется в пределах:
0>S>−∞.
Режим электромагнитного тормоза
Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т.е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении.
Согласно рис. 8 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдёт реверс.
В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.
 Рис.8
Рис.8
При n=n0,S=1.
При n→−∞,S→+∞.
Таким образом, в режиме электромагнитного тормоза скольжение изменяется в пределах:
0<S<∞.
(вопрос 20)Пуск асинхронных двигателей с фазным и с коротрозамкнутым ротором.
При включении асинхронного двигателя в сеть переменного тока по обмоткам его статора и ротора будут проходить токи, в несколько раз больше номинальных. Это объясняется тем, что при неподвижном роторе вращающееся магнитное поле пересекает его обмотку с большой частотой, равной частоте вращения магнитного поля в пространстве, и индуктирует в этой обмотке большую эдс. Эта эдс создает большой ток в цепи ротора, что вызывает возникновение соответствующего тока и в обмотке статора. При увеличении частоты вращения ротора скольжение уменьшается, что приводит к уменьшению эдс и тока в обмотке ротора. Это, в свою очередь, вызывает уменьшение тока в обмотке статора. Большой пусковой ток нежелателен как для двигателя, так и для источника, от которого двигатель получает энергию. При частых пусках большой ток приводит к резкому повышению температуры обмоток двигателя, что может вызвать преждевременное старение их изоляции. В сети при больших токах понижается напряжение, которое оказывает влияние на работу других приемников энергии, включенных в эту же сеть. Поэтому прямой пуск двигателя непосредственным включением его в сеть допускается только в том случае, когда мощность двигателя, намного меньше мощности источника энергии, питающего сеть. Схема включения пускового реостата в цепь фазного ротора асинхронного двигателя

Если
мощность двигателя соизмерима с мощностью
источника энергии, то необходимо
уменьшить ток, потребляемый этим
двигателем при пуске в ход.Двигатели с
фазным ротором обладают очень хорошими
пусковыми свойствами. Для уменьшения
пускового тока обмотку ротора замыкают
на активное сопротивление, называемое
пусковым реостатом (изо).
При
включении такого сопротивления в цепь
обмотки ротора ток в ней уменьшается,
а следовательно, уменьшаются токи как
в обмотке статора, так и потребляемый
двигателем из сети. При этом увеличится
активная составляющая тока ротора и,
следовательно, вращающий момент,
развиваемый двигателем при пуске в
ход.
Пусковые реостаты имеют
несколько контактов, поэтому можно
постепенно уменьшать сопротивление,
введенное в цепь обмотки ротора. После
достижения ротором нормальной частоты
вращения реостат полностью выводится,
т. е. обмотку ротора замыкают накоротко.
При нормальной частоте ротора
скольжение мало и эдс, индуктируемая в
его обмотке, также незначительна. Поэтому
никакие добавочные сопротивления в
цепи ротора не нужны.
Пусковые реостаты
работают непродолжительное время в
процессе разгона двигателя и рассчитываются
на кратковременное действие. Если
оставить реостат включенным длительное
время, то он выйдет из строя.
Двигатели с короткозамкнутым ротором
при малой мощности их по сравнению с
мощностью источника энергии пускают в
ход непосредственным включением в
сеть.
При большой же мощности двигателей
пусковой ток уменьшают, понижая
приложенное напряжение. Для понижения
напряжения на время пуска двигатель
включают в сеть через понижающий
автотрансформатор или реакторы. При
вращении ротора с нормальной частотой
вращения двигатель переключают на
полное напряжение сети.
Недостатком
такого способа пуска двигателя в ход
является резкое уменьшение пускового
момента. Для уменьшения пускового тока
в N раз необходимо приложенное
напряжение понизить также в N раз.
При этом пусковой момент, пропорциональный
квадрату напряжения, уменьшится в
N![]() раз.
Таким образом, понижение напряжения
допустимо при пуске двигателя без
нагрузки или при малых нагрузках, когда
пусковой момент может быть небольшим.
Схема
пуска короткозамкнутого асинхронного
двигателя с переключением обмотки
статора со звезды на треугольник.
раз.
Таким образом, понижение напряжения
допустимо при пуске двигателя без
нагрузки или при малых нагрузках, когда
пусковой момент может быть небольшим.
Схема
пуска короткозамкнутого асинхронного
двигателя с переключением обмотки
статора со звезды на треугольник.
 Часто двигатель пускают в ход
посредством переключения обмотки
статора со звезды на треугольник (изо).
В момент пуска обмотку статора соединяют
звездой, а после того как двигатель
разовьет частоту вращения, близкую к
нормальной, ее переключают треугольником.
При
таком способе пуска двигателя в ход
пусковой ток в сети уменьшается в три
раза по сравнению с пусковым током,
который потреблялся бы двигателем, если
бы при пуске обмотка статора была
соединена треугольником.
Этот
способ пуска можно применять для
двигателя, обмотка статора которого
при питании от сети данного напряжения
должна быть соединена треугольником.
Часто двигатель пускают в ход
посредством переключения обмотки
статора со звезды на треугольник (изо).
В момент пуска обмотку статора соединяют
звездой, а после того как двигатель
разовьет частоту вращения, близкую к
нормальной, ее переключают треугольником.
При
таком способе пуска двигателя в ход
пусковой ток в сети уменьшается в три
раза по сравнению с пусковым током,
который потреблялся бы двигателем, если
бы при пуске обмотка статора была
соединена треугольником.
Этот
способ пуска можно применять для
двигателя, обмотка статора которого
при питании от сети данного напряжения
должна быть соединена треугольником.