

26. Реверсивные механизмы разновидности принцип работы
Реверсивные механизмы — это устройства, изменяющие направление вращательного или поступательного движения. Конструкции их разнообразны, принципиально они сводятся к двум типам: механизмы с цилиндрическими зубчатыми колесами и коническими (рис. 63).
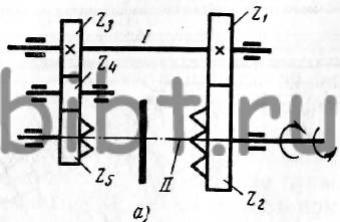

Рис. 63. Схемы реверсивных механизмов: а — с цилиндрическими, б — с коническими зубчатыми колесами
У механизма первого типа (рис. 63, а) движение передается с вала I на вал II. Жестко закрепленные зубчатые колеса z3 и z1 передают вращательное движение зубчатым колесам z5 b z2, при этом колесо z5 вращается свободно на валу II в одну сторону, а z2 — в другую. Присоединение кулачковой муфты к одному из зубчатых колес сообщит валу II направление вращения сцепленного с муфтой зубчатого колеса.
Конический реверсивный механизм (рис. 63, б) состоит из трех конических зубчатых колес и двух валов: ведущего I и ведомого II. Зубчатое колесо z1 может вращать колесо z3 в одном направлении, а z2 — в другом.
Переключая муфту к колесу z1 или колесу z2, колесу z3 сообщают различные направления вращения.
27. Устройства для осуществления периодических движений.
Из механических устройств для прерывистых перемещений применяются храповые и мальтийские механизмы, приводы с однооборотной муфтой, периодически включаемые приводы и др. Храповые механизмы в станках предназначены для преобразования непрерывного вращательного движения ведущего звена в периодическое движение ведомого звена и могут иметь наружное и внутреннее зацепление. Они используются в основном в тех случаях, когда периодическая подача осуществляется во время перебега в долбежных, строгальных, шлифовальных и других станках. В храповом механизме с наружным зацеплением ведущий вал вращает диск с кривошипным пальцем, который за один оборот диска сообщает шатуну движение вперед и назад. Шатун пальцем качает также вперед и назад планку и собачку. При движении вперед собачка поворачивает храповое колесо, при движении назад она проскакивает вхолостую по зубьям храпового колеса. В результате гайка и с ней рабочий орган станка получают прерывистое движение. Перестановкой кривошипного пальца (радиально к диску) регулируется перемещение гайки.
Мальтийские механизмы используют для периодических поворотов револьверных головок, шпиндельных блоков токарных автоматов и полуавтоматов, делительных многопозиционных столов и т. п. а вот изготовление пресс-форм потребует довольно специфического оборудования. Обычно мальтийский механизм состоит из двух деталей - креста и водила (кривошипа) с пальцем, причем ведущим звеном всегда является равномерно вращающийся палец, а ведомым - крест, совершающий периодические движения. Количество пазов в мальтийском кресте. При повороте водила с пальцем, находящимся в одном из пазов креста, на угол крест поворачивается на угол и останавливается (при выходе пальца из паза), оставаясь в этом положении до того момента, пока палец войдет в следующий паз креста после поворота водила на угол 360°. Мальтийские механизмы обеспечивают плавное изменение скорости поворота ведомого звена от нуля до максимальной и опять до нуля. Они бывают с наружным и внутренним зацеплением. Для осуществления прерывистых движений используются также одно- и многооборотные муфты, которые применяются в одношпиндельных токарно-револьверных автоматах для периодического включения приводов различных узлов. Механизмы обгона применяются в автоматах и полуавтоматах в "тех случаях, когда валу нужно передать движение от двух самостоятельных приводов. В периодически включаемом приводе рабочий орган получает движение от периодически включаемого электродвигателя. При периодических изменениях положений рабочего органа необходимы его остановы в строго заданных точках и фиксация, которые осуществляются фиксирующими механизмами различных конструкций.