

26.Автонастройка электропривода переменного тока. Идентификация, адаптация. Силовая схема. Элементы системы векторного управления.
Автоматическая настройка в системах управления асинхронного электропривода включает в себя внедрение преобразователей частоты, которые включают в свои функциональные возможности самонастройку регуляторов (автонастройка).
Для проведения автонастройки необходимо знать паспортные данные устанавливаемого двигателя. Затем в преобразователе выбирается режим автонастройки и после подачи команды запуска, процесс автонастройки системы запускается. Процесс длится 75 с и состоит из трех равных интервалов по 25 с. На первом интервале на каждую фазу двигателя последовательно подается постоянное напряжение, при этом ток нарастает ступенчато до 72% и затем до 92% от номинального тока двигателя. Полученные данные о величине и характере изменения тока позволяют определить значение активного сопротивления статора двигателя, а также провести настройку регуляторов тока преобразователя. На втором интервале ток в фазах А,В и С – синусоидальный с амплитудой 5% Iн двигателя, с частотой 4 Гц и смещен относительно нулевой оси на 15% Iн. Такой вид тока выбран с целью недопущения вращения оси ротора асинхронного двигателя. Полученные данные о токе могут быть использованы для нахождения значений индуктивностей статора и ротора, а также взаимной индуктивности. Третий интервал – ток в фазах А, В и С – синусоидальный с амплитудой 2.5% Iн двигателя, частотой 8 Гц и смещен относительно нулевой оси на 70% Iн. При этом ось ротора асинхронного двигателя остается неподвижной. Информация о токе используется для уточнения рассчитываемых значений индуктивности статора и ротора, а также взаимной индуктивности.
После проведения автонастройки и определения параметров двигателя, настраивается математическая модель асинхронного двигателя. В процессе проведения автонастройки определяются следующие параметры: активное сопротивление ротора, индуктивное сопротивление ротора, индуктивность рассеяния двигателя, коэффициенты регулятора тока и т.д.
Существуют следующие виды автонастройки:
1)Автонастройка без вращения – применяется только для векторного управления.
2)Автанастройка без вращения - служит для определения межфазного сопротивления. Может применятся в любом режиме регулирования. Такая настройка может использоваться для улучшения характеристик регулирования при большой длине кабеля, при изменении длины кабеля, а также в случае, когда двигатель и инвертор различаются по мощности.
Идентификация системы управления:
В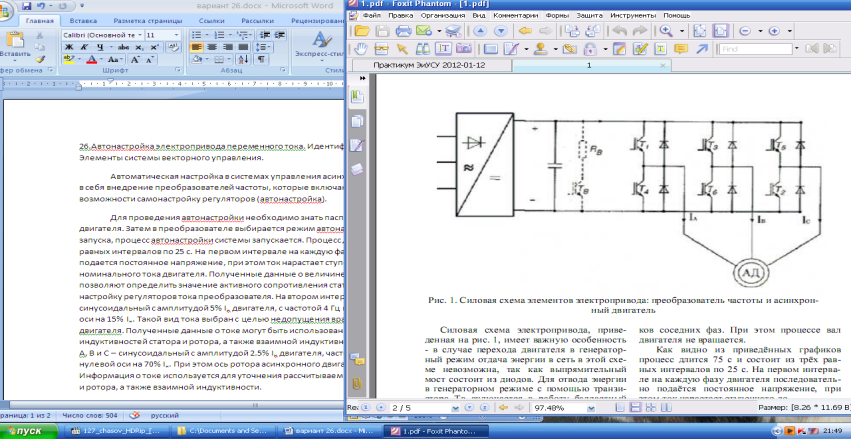 екторное
управление:
екторное
управление:
• Векторное регулирование магнитного потока
• Управление, ориентированное по полю
• Управление по вектору главного потокосцепления двигателя
• Управление по вектору потокосцепления статора
• Управление по вектору потокосцепления ротора
• Частотно-токовое векторное управление
Элементы системы векторного управления:
Вопрос №30 Асинхронный тахогенератор
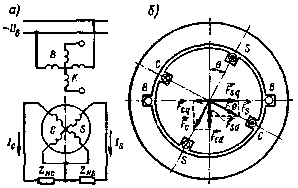
Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой - генераторной обмотки (ГО) снимается выходное напряжение (рис. 1).
Р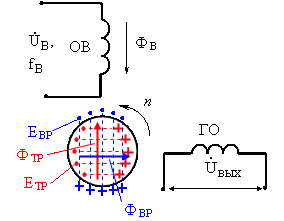 ис.
1. К вопросу о принципе действия
асинхронного тахогенератора
ис.
1. К вопросу о принципе действия
асинхронного тахогенератора
Принцип действия асинхронного тахогенератора заключается в следующем. (Для упрощения качественного анализа примем полый ротор состоящим из конечного числа витков, замкнутых на торцах).
При питании обмотки возбуждения переменным током частоты fВ возникает пульсирующий магнитный поток ФВ, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС - ЕТ (показана внутри ротора) и ЭДС вращения - ЕВР(показана снаружи ротора). В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток ФТР, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку ФТР, он не будет индуцировать в ней никакой ЭДС.
В контурах, параллельных оси обмотки возбуждения, но теперь уже под действием ЭДС вращения тоже протекают токи, которые создают свой поток ФВР. Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС.
При подключении нагрузки выходное напряжение UГ станет меньше ЭДС ЕГ на величину внутреннего падения напряжения IГZГ
![]()
В общем случае асинхронный тахогенератор (АТГ) представляет несимметричную двухфазную машину, которую можно исследовать методом симметричных составляющих, что приводит к следующему выражению выходной характеристики
![]()
где: k = WЭГ/WЭВ - коэффициент трансформации АТГ; - напряжение возбуждения; n = n/n1 - относительная частота вращения; - комплексные коэффициенты, зависящие от величины и характера нагрузки ZН, от параметров схемы замещения АТГ.
Как следует из выражения , выходное напряжение UГ не является линейной функцией относительной угловой скорости вращения n. Нелинейность создает квадратичная зависимость Вn2. Если Вn2 = 0, то UГ становится пропорциональным n, а тахогенератор считается идеальным. При проектировании АТГ выражение Вn2стремятся уменьшить как за счет уменьшения n так и за счет уменьшения В.
Так как n1 = 60f/р, то с целью уменьшения n тахогенераторы проектируют на большую частоту f. Правда при этом не уменьшают р, поскольку при р > 1, слабее проявляется магнитная несимметрия машины. Обычно р = 2.
Комплексный коэффициент В :
![]()
где ZCB - полное сопротивление обмотки возбуждения статора АТГ. Ясно, что с увеличением rP, коэффициент В будет уменьшаться. Вот почему ротор АТГ выполняют из материала с высоким удельным сопротивлением (фосфористой или марганцевой бронзы, манганина и др.)! Повышению линейности выходной характеристики способствует и работа при больших сопротивлениях нагрузки ZH. К уменьшению k и ZCB обычно не прибегают т.к. первое снижает крутизну выходной характеристики, а второе - увеличивает габариты АТГ.
Вопрос №31. Синусно-косинусный вращающийся трансформатор. Первичное и вторичное симметрирование.
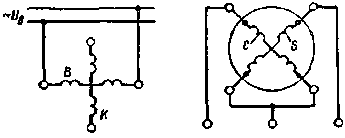
Выходные напряжения. На статоре этого трансформатора расположены обмотки В и К, а на роторе — обмотки S и С (см. рис. 1).Рис. 1. Принципиальная схема четырехобмоточного вращающегося трансформатора |
|
При холостом ходе напряжения на синусной S и косинусной С обмотках ротора равны соответствующим ЭДС:
US0 = ES0 = kЕв sin θ; UC0 = EC0 = kЕв cos θ,
т.е. изменяются по требуемым законам. Аналогичный режим работы возникает в случае, когда нагрузка синуснокосинусного
|
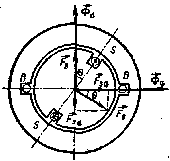
Векторная диаграмма МДС при подключении нагрузки к синусной обмотке |
трансформатора представляет собой электронное устройство с большим входным сопротивлением.
Если к синусной обмотке S подключить некоторую нагрузку Zн S , то по обмотке пойдет ток
ÍS = ÉS /(ZS + ZнS ),
где ZS — сопротивление обмотки S, которое считаем постоянным.
Ток IS создает МДС ротора FS . Как видно из рис. 2, ось этой МДС совпадает с осью фазы S , поэтому ее можно представить в виде суммы двух составляющих: продольной FSd = FS sin θ и поперечной FSq = FS cos θ. Продольная составляющаяFSd создает в обмотке возбуждения В компенсирующий ток, МДС которого Fв , так же как и в двухобмоточном трансформаторе, компенсирует действие FSd . Результирующий продольный поток Фd индуцирует ЭДС в обмотке S
ESd = kEв sinθ.
Поперечная составляющая FSq создает во вращающемся трансформаторе поперечный поток Фq. Относительно поперечного потока Фq обмотка S является косинусной и, следовательно, в ней индуцируется ЭДС
ESq = 4,44f1 w2 ko62 Фqm cos θ = CFS cos2 θ,
где С — постоянная.
Таким образом, при нагрузке в синусной обмотке кроме требуемой ЭДС, пропорциональной синусу угла поворота θ, индуцируется ЭДС, пропорциональная току нагрузки и квадрату косинуса θ. Эта добавочная составляющая ЭДС вызывает появление погрешностей. Аналогично в косинусной обмотке при нагрузке поперечным потоком Фq индуцируется добавочная ЭДС ECq , пропорциональная току нагрузки и квадрату синуса θ, которая также вызывает появление погрешностей.
Для устранения погрешности вращающегося трансформатора, обусловленной поперечным потоком Фq , применяют так называемое симметрирование трансформатора, т. е. компенсацию поперечного потока ротора. Существует два способа симметрирования: вторичное (со стороны ротора) и первичное (со стороны статора).
|
Рис. 3. Схема синусно-косинусного трансформатора со вторичным симметрированием и диаграмма МДС, создаваемых обмотками ротора |
Вторичное симметрирование. Для уменьшения погрешности выходного напряжения, снимаемого с синусной обмотки, подключают к косинусной обмотке сопротивление ZнС (рис. 3, а). В этом случае ток, проходящий по обмотке С, создает МДС FС , которую можно представить, так же как и МДС FS , в виде векторной суммы двух составляющих (рис. 3,б): продольной FСd = FС cos θ и поперечной FCq = FС sin θ. Продольная составляющая FCd совпадает по направлению с FSd , a поперечная составляющая FCq направлена против FSq . При FCq = FSqпоперечный поток Фq = 0. Следовательно, не возникает и погрешность, обусловленная этим потоком. Сопротивление ZнС, при котором обеспечено полное симметрирование, можно определить из условия
FS cos θ = FC sin θ
или с учетом значений FS и FC
ZS + ZнS = ZC + ZнC ,
т. е. полное симметрирование наблюдается при равенстве комплексных сопротивлений в цепи обмоток S и С ротора, т. е. их активных и реактивных составляющих. При вторичном симметрировании компенсируются МДС по поперечной оси; кроме того, ток Iв в обмотке возбуждения поворотного трансформатора не зависит от угла поворота, так как в формулу для результирующей продольной составляющей МДС ротора F́2d = F́Sd + F́Cd (определяющей силу тока Iв) не входит какаялибо функция угла θ:
F́2d = F́S sin θ + F́C cos θ = |
|
sin θ + |
|
cos θ = |
|
Éв , |
где Z2 = ZS = ZC ; Zн = ZнS = ZнC .
В результате уменьшается погрешность поворотного трансформатора.
Рассмотренный метод симметрирования практически применим только при постоянном сопротивлении нагрузки, что является его недостатком.
Первичное симметрирование. Для уменьшения погрешности выходного напряжения снимаемого, например, с обмотки S (рис. 4, а), компенсационную обмотку К статора замыкают на какое-либо малое сопротивление ZK или накоротко. В этом случае по поперечной оси вращающегося трансформатора действует результирующая МДС
Fq = FSq + FK ,
где FK — МДС, создаваемая компенсационной обмоткой.
Так как обмотка К относительно поперечного потока Фq представляет собой замкнутую накоротко вторичную обмотку трансформатора, то ее МДС F́K направлена против МДС F́Sq«первичной» обмотки, и результирующая МДС Fq , так же как и в трансформаторе тока, значительно
|
Рис, 4. Схемы синусно-косинусных вращающихся трансформаторов |
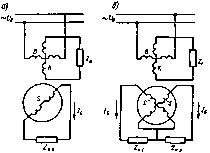
меньше МДС FSq . Поэтому поперечный поток Фq и вызванная им погрешность резко уменьшаются. При изменении нагрузки, подключенной к обмотке ротора, МДС FK изменяется примерно пропорционально МДС FSq , вследствие чего степень компенсации поперечного потока остается практически неизменной. Это является достоинством данного метода симметрирования. Однако при изменении угла поворота ротора θ изменяется ток Iв в обмотке возбуждения и при заданном напряжении Úв изменяется ЭДС Éв . В результате появляется дополнительная погрешность в значении выходных напряжений ÚS и ÚC на зажимах синусной и косинусной обмоток. Поэтому во вращающихся трансформаторах обычно применяют одновременно первичное и вторичное симметрирование (рис.4,б). Рассмотренные методы компенсации поперечного потока Фq позволяют использовать в качестве выходной как синусную, так и косинусную обмотки. Поэтому вращающийся трансформатор, включенный по схеме, изображенной на рис. 4,б, называют синусно-косинусным.
(вопрос 32) Линейный режим работы поворотного трансформатора.
Известно, что синус малого угла равен самому углу. Поэтому с погрешность 0,1% можно считать, что СКПТ обеспечит линейную зависимость U = ka в диапазоне a = ±4,5о. Если допустить погрешность 1%, диапазон увеличится доa= ±14о. Однако в гораздо более широком интервале углов линейную зависимость U = ka реализует функция

При k = 0,5 ее можно представить в виде степенного ряда

члены которого быстро убывают. С погрешность 1% можно ограничиться только линейным коэффициентом этого ряд в диапазоне углов ±60о.
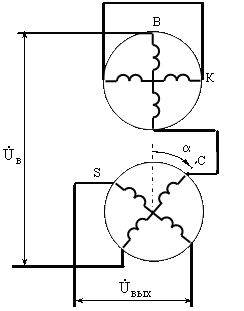
Рис.1. Схема ЛПТ с первичным симметрированием
Подбором коэффициента в пределах k = 0,52¸0,56 точность аппроксимации можно довести до 99, 9% в диапазоне углов ±55о.
Наиболее распространенная схема линейного поворотного трансформатора представлена на рис.1, из которой видно, что это схема с первичным симметрированием. Следовательно, можно принять Фq = 0 и при анализе процессов в ПТ учитывать только продольный поток Фd.
Если пренебречь внутренним падением напряжения в обмотках

Отсюда
Выходной сигнал

Из последней формулы видно, что при проектировании СКПТ следует коэффициент трансформации выбирать в пределах 0,52¸0,56.
Вопрос №36
Сельсины. Дифференциальный режим работы.
Дифференциальный
сельсин используют в тех случаях, когда
требуется поворачивать ведомую ось O2
на угол, равный сумме или разности углов
поворота двух ведущих осей O1и O'1
Рис. 1. Схема включений дифференциального сельсина
(рис. 1). При этом с ведущими осями механически связаны два сельсина-датчика Д1 и Д2 , а с ведомой осью — дифференциальный сельсин ДС . Сельсины-датчики выполнены обычно, т. е. имеют однофазную обмотку возбуждения и трехфазную обмотку синхронизации. Конструкция дифференциального сельсина подобна конструкции трехфазного асинхронного двигателя: он имеет на статоре и роторе по три распределенных обмотки, оси которых сдвинуты на 120°; обмотка статора присоединена к обмотке синхронизации датчика Д2 , а обмотка ротора — к обмотке синхронизации датчика Д1 .
Р ис.
2. Векторы МДС ротора и статора в
дифференциальном сельсине при повороте
роторов датчиков
ис.
2. Векторы МДС ротора и статора в
дифференциальном сельсине при повороте
роторов датчиков
В рассматриваемой схеме при любых углах поворота θ1 и θ2 роторов датчиков Д1 и Д2 в цепях обмоток синхронизации проходят токи, определяемые ЭДС, индуцированными в фазах соответствующих обмоток. В дифференциальном сельсине ДС, являющемся приемником, эти токи создают МДС статора F1 и МДС ротора F2 , которые, так же как при работе сельсинов в трансформаторном режиме, смещены относительно оси первой фазы статора и ротора (от которой ведется отсчет) соответственно на углы θ1 и θ2 .
Если θ1 = θ2 векторы МДС статора и ротора занимают одинаковые положения в пространстве, при этом между статором и ротором существуют только радиальные силы притяжения (рис. 2, а). При θ1 ≠ θ2 (рис. 5.44, б) между векторами МДС ротора и статора образуется угол θ = θ1 + θ2 (знак «-» при повороте роторов датчиков в одну сторону и « + » при повороте роторов датчиков в противоположные стороны). В результате этого появляется синхронизирующий момент Мсн , под действием которого ротор дифференциального сельсина поворачивается в сторону оси МДС статора F1 , т. е. происходит отработка угла θ.