9. Уравнения равновесия пространственной системы сил
1.
В случае произвольной пространственной
системы сил из векторных условий
![]() Вытекают
6 скалярных условий:
Вытекают
6 скалярных условий:
 2.
Произвольная плоская система сил (все
силы системы лежат в плоскости xy).
2.
Произвольная плоская система сил (все
силы системы лежат в плоскости xy).
В
этом случае
лежит
плоскости xy, а
![]() параллельно
оси z.
Тогда в скалярном виде уравнения
равновесия примут вид:
параллельно
оси z.
Тогда в скалярном виде уравнения
равновесия примут вид:
![]() 3.
Система сходящихся сил. Линии действия
всех сил пересекаются одной точке. Если
в качестве центра приведения выбрана
точка пересечения линий действия сил
системы, то
3.
Система сходящихся сил. Линии действия
всех сил пересекаются одной точке. Если
в качестве центра приведения выбрана
точка пересечения линий действия сил
системы, то
![]() и
остается три условия равновесия:
и
остается три условия равновесия:
![]() В
случае системы сходящихся сил на
плоскости остается 2 скалярных уравнения
равновесия:
В
случае системы сходящихся сил на
плоскости остается 2 скалярных уравнения
равновесия:
![]()
10. Уравнения равновесия системы параллельных сил
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):
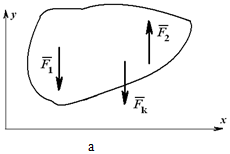
∑xi =0;
∑Mo=0. (1.24)
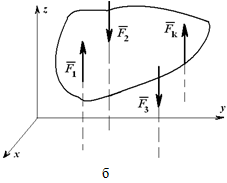
Рисунок 1.26
Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
∑zi =0;
∑Mix=0; (1.25)
∑Miy=0.
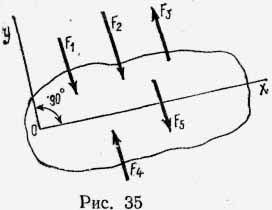
В частном случае линии действия сил, образующих пространственную систему, могут оказаться параллельными. Тогда одну из осей (например, ось z) выгодно расположить параллельно силам (рис. 160), а две другие оси расположатся в плоскости, перпендикулярной к линиям действия сил.
Легко понять, что для уравновешенной пространственной системы параллельных сил вместо шести уравнений можно составить лишь три: алгебраическую сумму проекций сил на ось, параллельную данным силам, и два уравнения моментов относительно двух других осей. Остальные уравнения превратятся в тождество вида 0=0.
В соответствии с расположением осей (см. рис. 160) уравнения равновесия имеют вид: ∑ Zi = 0; (2) ∑ Mx(Pi) = 0; ∑ My(Pi) = 0.
Д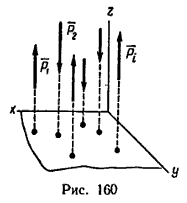 ля
пространственной системы параллельных
сил можно составить лишь три уравнения
равновесия, поэтому, чтобы задача была
статически определимой, в ней должно
содержаться не более трех неизвестных
сил.
ля
пространственной системы параллельных
сил можно составить лишь три уравнения
равновесия, поэтому, чтобы задача была
статически определимой, в ней должно
содержаться не более трех неизвестных
сил.
11. Уравнения равновесия плоской системы сил.
Как известно, необходимыми и достаточными условиями равновесия плоской произвольной системы сил являются равенства нулю ее главного вектора и главного момента.
Существуют
три формы уравнений равновесия плоской
системы сил.
Первую
форму
получим, спроектировав на оси координат
векторное равенство
![]() и присоединив к получившимся двум
уравнениям равенство
и присоединив к получившимся двум
уравнениям равенство
![]() ,
выражающее
условие равенства нулю главного момента:
,
выражающее
условие равенства нулю главного момента:
![]() ,
,
![]() ,
,
![]() .
(1.6)
.
(1.6)
Первые
два уравнения называются уравнениями
проекций сил на оси координат,
третье - уравнением
моментов.
Точка
![]() может быть выбрана произвольно.
может быть выбрана произвольно.
Легко доказать, что необходимые и достаточные условия равновесия плоской системы сил могут быть записаны еще в двух формах.
Вторая форма:
,
![]() ,
,
![]() ,
(1.7)
,
(1.7)
где
ось проекций
![]() должна быть не перпендикулярна к отрезку
должна быть не перпендикулярна к отрезку
![]() .
.
Третья форма:
,
,
![]() ,
(1.8)
,
(1.8)
где
точки
![]() не должны
лежать на одной прямой.
не должны
лежать на одной прямой.
Отметим, что для любой из трех форм уравнений равновесия число независимых между собой уравнений равновесия равно трем. Задачи, в которых все неизвестные могут быть определены из уравнений равновесия твердого тела, называются статически определенными. Если же неизвестных больше, чем этих уравнений, то задача оказывается статически неопределенной.