

24. Мгновенная ось вращения при сферическом движении твердого тела. Определение угловой скорости и углового ускорения тела при сферическом движении.
Чтобы представить себе наглядную геометрическую картину движения тела, имеющего одну неподвижную точку, рассмотрим результат, сформулированный в теореме Даламбера – Эйлера (1749-1750 г).
В каждый момент времени движение твердого тела вокруг неподвижной точки можно рассматривать как вращение вокруг мгновенной оси, проходящей через эту точку.
мгновенная ось вращения – геометрическое место точек, скорости которых равны нулю в данный момент времени.
Ось ОР называют мгновенной осью вращения. Итак, при движении твердого тела, имеющего одну неподвижную точку, в каждый данный момент существует мгновенная ось вращения, проходящая через эту неподвижную точку.
Отсюда следует, что движение твердого тела вокруг неподвижной точки можно представить себе как непрерывный ряд последовательных вращений вокруг мгновенных осей, проходящих через неподвижную точку.
Угловая
скорость
![]() ,
с которой происходит элементарный
поворот тела вокруг мгновенной оси
вращения, называется мгновенной угловой
скоростью. Условимся вектор
направлять по мгновенной оси вращения
в ту часть пространства, откуда вращение
тела видно против хода часовой стрелки
(рис.10).
,
с которой происходит элементарный
поворот тела вокруг мгновенной оси
вращения, называется мгновенной угловой
скоростью. Условимся вектор
направлять по мгновенной оси вращения
в ту часть пространства, откуда вращение
тела видно против хода часовой стрелки
(рис.10).
При
движении тела вектор
в общем случае изменяется со временем
и по модулю, и по направлению, т.е.
![]() .
Будем называть вектором углового
ускорения вектор, характеризующий
изменение в данное мгновение величины
и направления угловой скорости тела
.
Будем называть вектором углового
ускорения вектор, характеризующий
изменение в данное мгновение величины
и направления угловой скорости тела
![]() .
(19)
.
(19)
Направление
вектора
![]() совпадает с направлением касательной
совпадает с направлением касательной
![]() к вектору
(рис.10).
к вектору
(рис.10).
25. Определение скоростей и ускорений точек твердого тела при сферическом движении.
С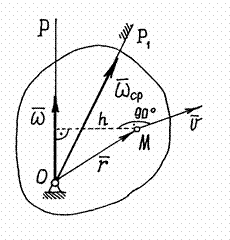 корость
точек тела.По
теореме Даламбера-Эйлера за малое время
корость
точек тела.По
теореме Даламбера-Эйлера за малое время
![]() движение тела можно представить как
вращение вокруг неподвижной оси
движение тела можно представить как
вращение вокруг неподвижной оси
![]() с некоторой угловой скоростью
с некоторой угловой скоростью
![]() (рис.23).
(рис.23).
Рис.23
Тогда скорость точки
![]() :
:
![]() В пределе, при
В пределе, при
![]() ,
угловая скорость
будет приближаться к мгновенной угловой
скорости
,
угловая скорость
будет приближаться к мгновенной угловой
скорости
![]() ,
направленной по мгновенной оси вращения
,
направленной по мгновенной оси вращения
![]() ,
а скорость точки
,
а скорость точки
![]() -
к истинному значению:
-
к истинному значению:
![]()
![]() .
.
Но таким же образом
находится скорость точки при вращении
тела вокруг оси, по которой направлен
вектор
![]() ,
в нашем случае – по мгновенной оси
вращения
.
Поэтому скорость точки можно определить
как скорость её при вращении тела вокруг
мгновенной оси
.
Величина скорости
,
в нашем случае – по мгновенной оси
вращения
.
Поэтому скорость точки можно определить
как скорость её при вращении тела вокруг
мгновенной оси
.
Величина скорости
![]() (рис.23).
(рис.23).
Ускорение точек
тела. Сначала
определим угловое ускорение тела
![]() .
При движении тела вектор угловой
скорости
изменяется и по величине, и по направлению.
Точка расположенная на его конце
будет двигаться по некоторой траектории
со скоростью
.
При движении тела вектор угловой
скорости
изменяется и по величине, и по направлению.
Точка расположенная на его конце
будет двигаться по некоторой траектории
со скоростью
![]() (рис.25).
(рис.25).
Р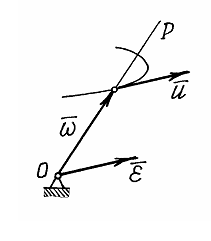 ис.25
ис.25
Если рассматривать
вектор
как радиус-вектор этой точки, то
![]() .
.
Итак. Угловое
ускорение тела можно определить
как скорость точки, расположенной на
конце вектора угловой скорости:![]() .
.
Этот результат называется теоремой Резаля.
Теперь обратимся к определению ускорения точек. Ускорение какой-либо точки тела
![]() ,
есть сумма
двух векторов.
,
есть сумма
двух векторов.
Первый вектор
![]() .
Модуль его
.
Модуль его
![]() ,
где h1
– расстояние от точки
до вектора
,
где h1
– расстояние от точки
до вектора
![]() .
Направлен он перпендикулярно
и
.
Но таким же способом определяется
касательное ускорение. Поэтому первую
составляющую ускорения определяют
как касательное ускорение,
предполагая, что тело вращается
вокруг оси, совпадающей с вектором
.
И обозначается этот вектор ускорения
так
.
Направлен он перпендикулярно
и
.
Но таким же способом определяется
касательное ускорение. Поэтому первую
составляющую ускорения определяют
как касательное ускорение,
предполагая, что тело вращается
вокруг оси, совпадающей с вектором
.
И обозначается этот вектор ускорения
так
![]()
Второй вектор
![]() Модуль его
Модуль его
![]() ,
но
,
но
![]() ,
т.к. векторы
и
,
т.к. векторы
и
![]() перпендикулярны друг другу.
перпендикулярны друг другу.
Р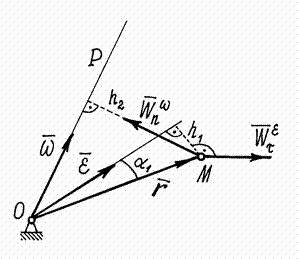 ис.26
ис.26
Значит
![]() ,
где h2
– расстояние от точки М
до мгновенной оси
,
до вектора
.
,
где h2
– расстояние от точки М
до мгновенной оси
,
до вектора
.
Направлен вектор
![]() перпендикулярно
и
,
т.е. так же как вектор нормального
ускорения при вращении вокруг оси
,
или вектора
.
Поэтому этот вектор ускорения и
обозначают, соответственно, так:
перпендикулярно
и
,
т.е. так же как вектор нормального
ускорения при вращении вокруг оси
,
или вектора
.
Поэтому этот вектор ускорения и
обозначают, соответственно, так:
![]()
Итак, ускорение
точек тела, вращающегося вокруг
неподвижной точки, определяется как
сумма двух ускорений:
![]()
Этот результат
называется теоремой
Ривальса.
Заметим, что
в общем случае векторы
и
не совпадают и угол между
![]() и
и
![]() не равен
не равен
![]() ,
векторы не перпендикулярны друг другу,
как это было при вращении тела вокруг
неподвижной оси.
,
векторы не перпендикулярны друг другу,
как это было при вращении тела вокруг
неподвижной оси.