

Содержание
Введение 2
1. Задача про лису и собаку, движущихся на неограниченном участке 3
1.1. Постановка задачи 3
1.2. Неподвижная система координат 3
1.3. Движущейся система координат 5
1.4.Движение по параболе 6
2. Решение задачи 7
2.1.Решение 7
3. Задача про лису и собаку на ограниченном участке в форме круга 9
3.1.Постановка задачи 9
3.1.1. Частный случай 1 9
3.1.2. Частный случай 2 11
3.1.3.Частный случай 3 12
5.Решение задач 15
5.1.Постановка задачи 1 15
5.1.1.Решение задачи 1 15
5.2.Постановка задачи 2 16
5.2.1.Решение задачи 2 16
6.Заключение 17
7.Литература 18
Введение.
В данной работе представлено исследование движения двух материальных точек, одна из которых условно догоняет другую, для наглядности обозначенных как лиса и собака.
Были рассмотрены два возможных случая: движение на неограниченном пространстве и на территории в форме круга, а также частные случаи для данной задачи(движение в неподвижной и подвижной системах координат, по параболе, по окружности и по ломаной).
Целю работы: было найти пути решения физических задач математическими методами.
Был изучен теоретический материал по теме движения материальных частиц и решению несколько практических задач на движение.
Данная работа может иметь практическое значение для изучения движения элементарных частиц и решения физических задач, в которых требуется определить взаимное расположение нескольких тел по определенному принципу, с учетом направления их движения. В результате проведенных исследований были установлены траектории движения тел в различных системах координат, доказанно ряд положений о взаимном расположении тел. Доказательная база была использована для решения поставленных задачь.
З
 адача
про лису и собаку, движущихся на
неограниченном участке.
1.1.
Постановка задачи
адача
про лису и собаку, движущихся на
неограниченном участке.
1.1.
Постановка задачи
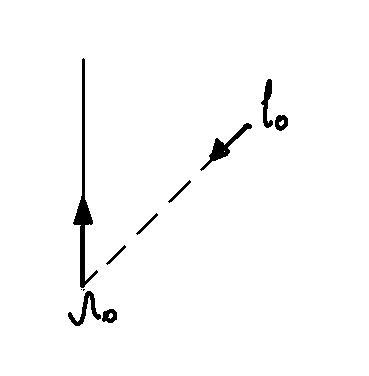
Лиса бежит по прямой с постоянной скоростью. Собака гонится за лисой с той же скоростью, причем бежит так, что видит лису все время перед собой. Лиса бежит из точки Л0 в направлении, указанном стрелкой(рис. 1). Собака в начальный момент находится в точке С0. При каких С0 собака догонит лису? Рис.1
Иными словами задачу можно сформулировать следующим образом:
Дано: V1 – постоянная скорость лисы
V2 – та же скорость собаки
Л0, С0 – точки, в которых находятся лиса и собака
Найти: точки С0, при которых собака догонит лису.
1.2 Неподвижная система координат.
Обозначим прямую,
по которой бежит  лиса
Л, через L.
В точке Л0
поставим к ней перпендикуляр р(рис.2).
Если собака находится в начальный момент
на прямой L,
все ясно:
лиса
Л, через L.
В точке Л0
поставим к ней перпендикуляр р(рис.2).
Если собака находится в начальный момент
на прямой L,
все ясно:
Если С0 расположена перед Л0, то собака бежит навстречу лисе и ловит ее; Если С0 – сзади Л0, то собака никогда не догонит лису.
Если С0 позади Л0(ниже перпендикуляра р), то Рис. 2
лису не догнать.
Доказательство:
Разложим V1на две составляющие – V1 = VL(вдоль L) + VP(вдоль р).
Спроектируем точку С0 на прямую L в точку П(С0ПL).
Тогда VL – скорость, с которой точка П движется вдоль прямой L вслед за Л.
Поскольку VLV, то расстояние между П и Л не уменьшается с течением времени.
 Так
что собака в этом случае не догонит
лису.
Так
что собака в этом случае не догонит
лису.
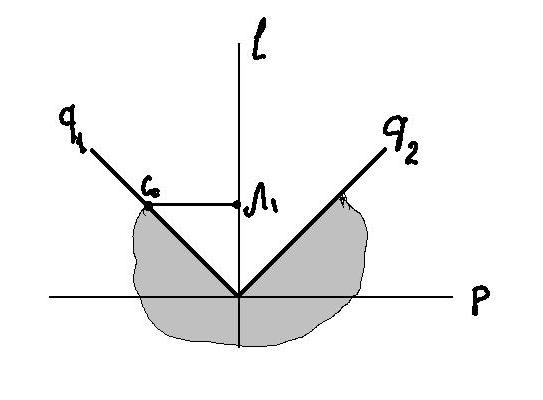
Точка С0 – вне прямой L и впереди Л0(выше перпендикуляра р).
Проведем из точки два луча: Q1 и Q2 –под углом 45 к прямым L и р(рис. 3). Окрашенная зона безопасна для лисы: если С0 находится в этой зоне, то собака, бегущая из точки С0, не догонит лису.
 Доказательство:
Рис.
3
Доказательство:
Рис.
3
Возьмем точку С0 даже не внутри, а на границе зоны – на луче Q1. v – это вектор, а - его длина.
Л – такая точка на прямой L, что С0L L.
Даже если бы собака бежала наперерез лисе по перпендикуляру С0L, то и тогда она
Рис. 4
подбежала бы к прямой L лишь одновременно с лисой(Л0Л1=С0Л1).
На самом же деле, собака бежит к L по более длинному пути. Значит, когда лиса окажется в точке Л1, собака еще не добежит до L. При этом она окажется позади лисы – за перпендикуляром С0Л1.
А в такой ситуации она не сможет догнать лису.
1.3. Движущейся система координат.
 Теперь
выберем прямоугольную систему координат
(х,у) так, чтобы она равномерно двигалась
вместе с лисой в направлении оси у.
Теперь
выберем прямоугольную систему координат
(х,у) так, чтобы она равномерно двигалась
вместе с лисой в направлении оси у.
Лиса:
Пусть в начальный момент лиса находилась в начале координат нашей движущейся системы(в точке О). Тогда она все время будет находиться в этой точке. Как будет двигаться собака относительно системы (х,у)?
Собака: Рис. 5а
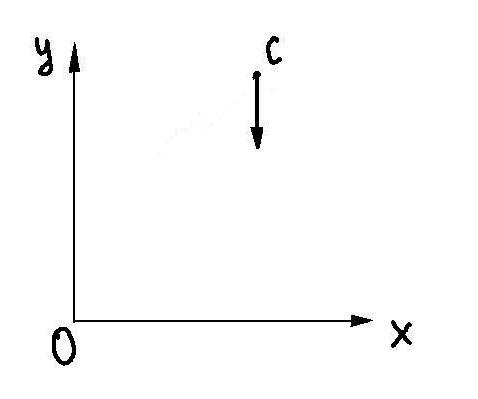 Возьмем
на плоскости (х;у) какую-нибудь точку
С(рис. 5, а). Чтобы точка С находилась в
покое с точки зрения неподвижного
наблюдателя, нужно скомпенсировать
движение системы (х,у), то есть нужно
заставить точку С двигаться относительно
системы (х,у) в направлении, противоположном
направлению оси у, причем абсолютная
величина скорости этого движения должна
быть та же, что и у лисы(рис. 5, б).
Возьмем
на плоскости (х;у) какую-нибудь точку
С(рис. 5, а). Чтобы точка С находилась в
покое с точки зрения неподвижного
наблюдателя, нужно скомпенсировать
движение системы (х,у), то есть нужно
заставить точку С двигаться относительно
системы (х,у) в направлении, противоположном
направлению оси у, причем абсолютная
величина скорости этого движения должна
быть та же, что и у лисы(рис. 5, б).
Рис. 5б
П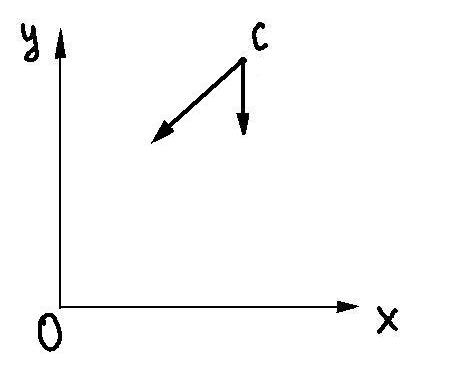 о
условию задачи собака бежит прямо на
лису. Значит, относительно системы (х,у)
собака участвует в двух движениях:
во-первых, равномерно движется со
скоростью v
направлении, противоположном оси у,
во-вторых, приближается с той же скоростью
к началу координат. Стрелки на рисунке
5, в – это
о
условию задачи собака бежит прямо на
лису. Значит, относительно системы (х,у)
собака участвует в двух движениях:
во-первых, равномерно движется со
скоростью v
направлении, противоположном оси у,
во-вторых, приближается с той же скоростью
к началу координат. Стрелки на рисунке
5, в – это
Рис. 5В
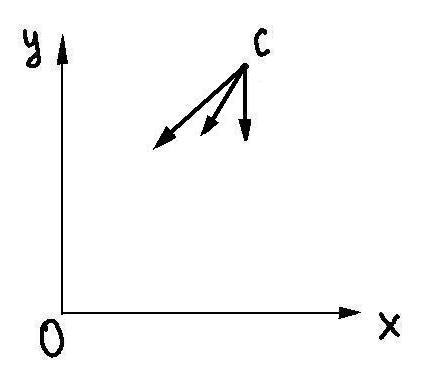 векторы
скоростей в каждом из указанных движений.
Результирующая скорость движения собаки
относительно системы координат (х,у)
находится по правилу параллелограмма(рис.
5, г).
векторы
скоростей в каждом из указанных движений.
Результирующая скорость движения собаки
относительно системы координат (х,у)
находится по правилу параллелограмма(рис.
5, г).
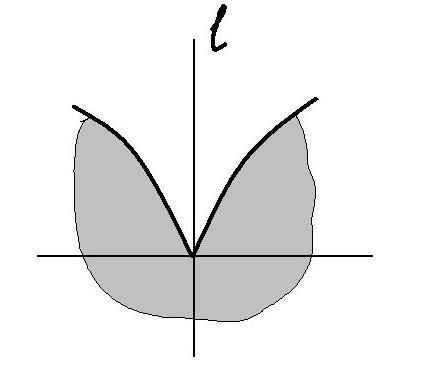
До сих пор мы рисовали точку С в одном и том же месте на плоскости (х,у). На рисунке 6 показано, как результирующая Рис. 5г
скорость зависит от расположения точки С.
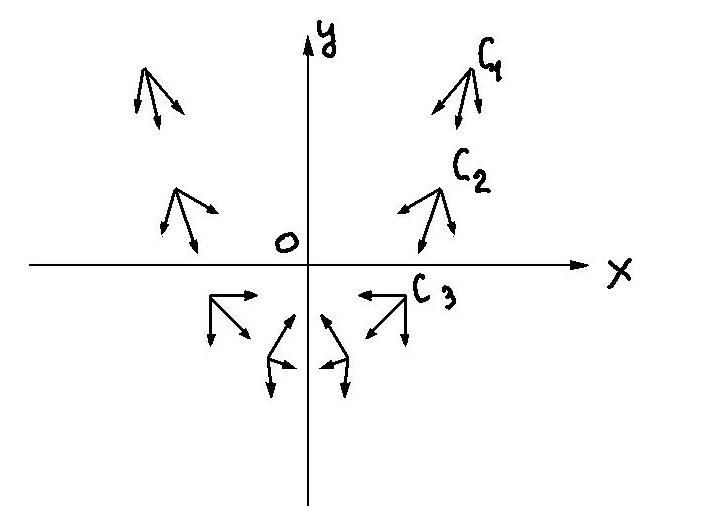 Чем
больше угол между векторами, которые
складываются, тем короче вектор
результирующей скорости. Если расположить
точку С на отрицательной полуоси у, то
векторы, которые складываются, будут
иметь противоположные направления и
результирующая скорость окажется равной
нулю. Так, разумеется, и должно быть:
если собака находится строго сзади
Рис. 6
Чем
больше угол между векторами, которые
складываются, тем короче вектор
результирующей скорости. Если расположить
точку С на отрицательной полуоси у, то
векторы, которые складываются, будут
иметь противоположные направления и
результирующая скорость окажется равной
нулю. Так, разумеется, и должно быть:
если собака находится строго сзади
Рис. 6
лисы, то она бежит за ней, не приближаясь и не отставая, то есть находится в состоянии покоя относительно системы (х,у).