

5.4.3 Построение профиля кулачка
Как было отмечено выше при построении профиля кулачка применяется метод обращения движения. Вычерчивают окружность минимального радиуса и нулевое положение толкателя (толкатель опирается на окружность минимального радиуса). Придается всем звеньям угловая скорость (-кул). Кулачок становится неподвижным, а толкатель со стойкой получают обращенное движение. Строят "n" положений толкателя в его обращенном движении и на каждом из них откладывают перемещения толкателя вдоль его оси в соответствии с заданным законом движения. Соединив отмеченные точки плавной кривой, получают теоретический профиль кулачка (рисунок 50).

Рисунок 50
Приняв некоторое значение радиуса ролика (rрол), проводят ряд окружностей (засечек) этим радиусом с центром на теоретическом профиле. Внутри теоретического профиля проводят огибающую к этим окружностям (засечкам). Полученная кривая представляет собой практический профиль кулачка. Радиус ролика выбирается из конструктивных соображений. Он может быть любым, но не больше минимального радиуса кривизны теоретического профиля (иначе произойдет самопересечение практического профиля и его заострение). Часто в качестве ролика принимают один из стандартных подшипников качения подходящих размеров.
Особенностью построения профиля кулачка с плоским толкателем является то, что положение толкателя определяется положением его тарелки. После того, как будут отмечены точки, показывающие положение толкателя в обращенном движении, необходимо через эти точки провести тарелку под углом 900 (или в общем случае под углом ) к соответствующему положению оси толкателя. Огибающая к этим положениям тарелки в обращенном движении представляет собой профиль кулачка (рисунок 51).

Рисунок 51
В данном случае теоретический и практический профили совпадают. Если выбрано небольшое количество положений для построения, то тарелка в обращенном движении образует некоторый многоугольник, в который и надо вписывать профиль. При этом кривая, формирующая профиль, должна касаться всех положений тарелки в обращенном движении.
5.4.4 Силовое замыкание высшей кинематической пары
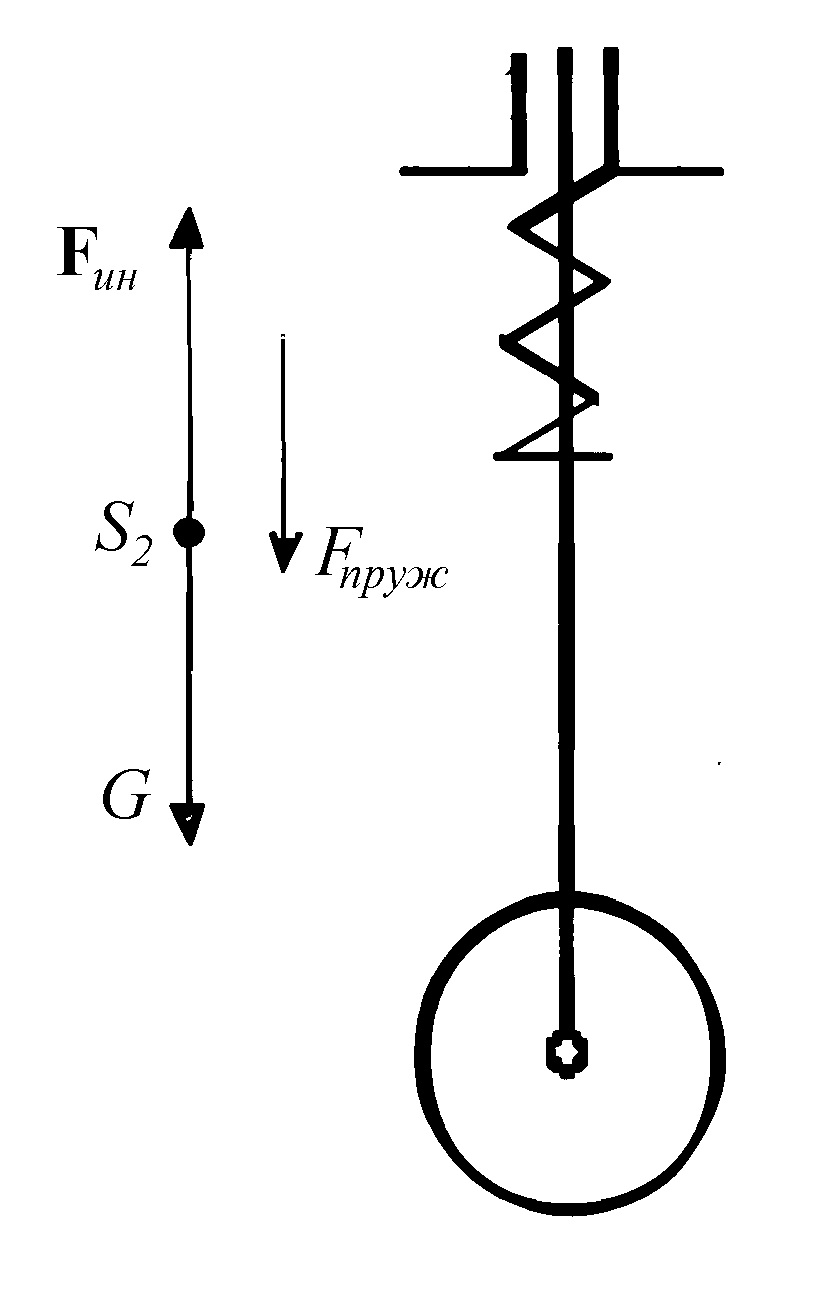
Наличие в кулачковых механизмах высшей кинематической пары, требует решения задачи обеспечения постоянного контакта толкателя с кулачком в процессе работы. Существуют механизмы с геометрическим замыканием этой пары, когда конфигурация звеньев препятствует их разъединению в процессе работы. Этот способ реализуется при применении пазовых, двухдисковых, диаметральных кулачков. Однако это в значительной степени усложняет механизм, ухудшает его работу, ограничивает возможности кулачковых механизмов. Поэтому в большинстве случаев применяются механизмы с силовым замыканием этой высшей пары, когда постоянный контакт между кулачком и толкателем при работе механизма обеспечивается постоянно действующей силой, прижимающей толкатель к кулачку. Иногда это сила веса. Но обычно дополнительно ставится пружина, т.к. силы веса недостаточно, чтобы компенсировать возникающие при работе отрывающие толкатель от кулачка силы инерции (кроме того, при работе большинства машин, в которых применяются кулачковые механизмы, толкатель не всегда занимает вертикальное положение и имеет верхнее расположение). Усилие, которое должна обеспечивать пружина, рассчитывается с учетом сил инерции, возникающих при работе механизма. Максимальная сила инерции толкателя, отрывающая его от кулачка, соответствует максимальному отрицательному значению ускорения на диаграмме движения толкателя.
Решение представляет собой элементарную задачу статики и показано на рисунках 52 и 53:
где
где m
– масса толкателя.
![]()
![]()

![]()
Рисунок 52 – Кулачковый механизм с поступательно движущимся толкателем
![]()
![]() ,
где
,
где
![]()

![]() где
где![]()
![]() .
.
Для определения усилия пружины составим уравнения моментов относительно точки О2:
![]()
Рисунок 53 - Кулачковый механизм с коромысловым толкателем
ЛИТЕРАТУРА
1 Артоболевский И.И. Теория механизмов и машин: учебник для втузов.– 4-е издание – М.: Наука, 1998. – 640 с.
2 Артоболевский И.И., Эдельштейн Б.В. Сборник задач по теории механизмов и машин.- М.: Наука, 1995. – 256 с.
3 Левицкая О. Н., Левицкий Н. И. Курс теории механизмов и машин. – М.: Высшая школа, 1985. – 279 с.
4 Теория механизмов и машин: Учеб. для втузов / К.В. Фролов, С.А. Попов, А.К. Мусатов и др. – М.: Высшая школа, 2003. – 496 с.
5 Смелягин А.И. Теория механизмов и машин. Курсовое проектирование: учеб.пособие. – М.: ИНФРА–М; Новосибирск: Изд-во НГТУ, 2003. – 263с.
6 Щеглов Э.А., Ямалтдинов А.И., Курсовое проектирование по теории механизмов и машин / Учебно-методическое пособие.– Уфа: Типография УГНТУ.– 2006
7 ГОСТ 2.105 – 95 ЕСКД. Общие требования к текстовым документам