

Лекция 5 Механические характеристики электропривода постоянного тока с двигателем независимого возбуждения
План лекции:
Электромеханические характеристики двигателя постоянного тока независимого возбуждения.
2. Механические характеристики электропривода постоянного тока независимого возбуждения.
Схема включения двигателя постоянного тока независимого возбуждения представлена на рис 6.1. Якорь двигателя и его обмотка возбуждения ОВ получают питание источников напряжения U и UВ
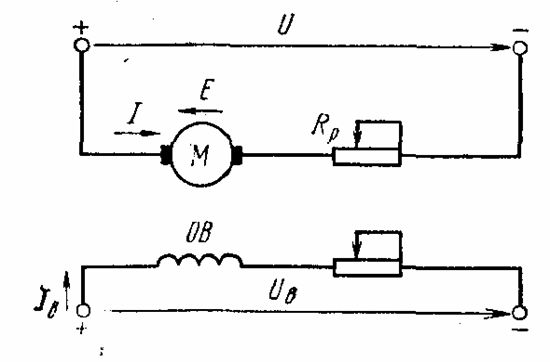
Рис.6.1. Схема включения двигателя постоянного тока
независимого возбуждения
Направления тока I и ЭДС вращения двигателя Е, показанные на рис. 6.1, соответствуют двигательному режиму работы, когда электрическая энергия потребляется двигателем из сети и преобразуется в механическую энергию, мощность которой равна Р = М . Зависимость между М и двигателя определяется его механической характеристикой.
Выражение для механической характеристики двигателя может быть получено из уравнения равновесия напряжений, составленного для якорной цепи схемы:
![]() (6.1)
(6.1)
где I - ток в якорной цепи двигателя, А; R - суммарное сопротивление якорной цепи, Ом, включающее внешнее сопротивление резистора Rp и внутреннее сопротивление якоря двигателя Rя (при наличии дополнительных полюсов учитывается и их сопротивление);
![]() (6.2)
(6.2)
где k — коэффициент, зависящий от конструктивных данных двигателя, k=pN/2πа (р — число пар полюсов двигателя; N — число активных проводников обмотки якоря; а — число пар параллельных ветвей обмотки якоря); Ф и — соответственно магнитный поток, Вб, и угловая скорость двигателя, рад/с.
Подставим в (6.1) значение Е из (6.2), и получим выражение для скорости двигателя
 (6.3)
(6.3)
Такую зависимость =f(I) называют электромеханической характеристикой двигателя.
Для получения механической характеристики необходимо учесть, что момент, развиваемый двигателем, связан с током якоря и магнитным потоком зависимостью:
![]() (6.4)
(6.4)
Подставив в (3.3) значение тока I, найденное из (6.4), получим выражение для механической характеристики двигателя:
 (6.5)
(6.5)
или  (6.6)
(6.6)
где
![]() (6.7)
(6.7)
Коэффициент с принимается постоянным, не зависящим от нагрузки, если у двигателя с независимым возбуждением имеется компенсационная обмотка. Он может считаться неизменным, если для обычных двигателей пренебречь реакцией якоря.
Механическая характеристика двигателя при неизменных параметрах U, Ф и R является прямой линией. На рис. 6.2 представлены механические характеристики двигателя независимого возбуждения для различных сопротивлений якорной цепи.
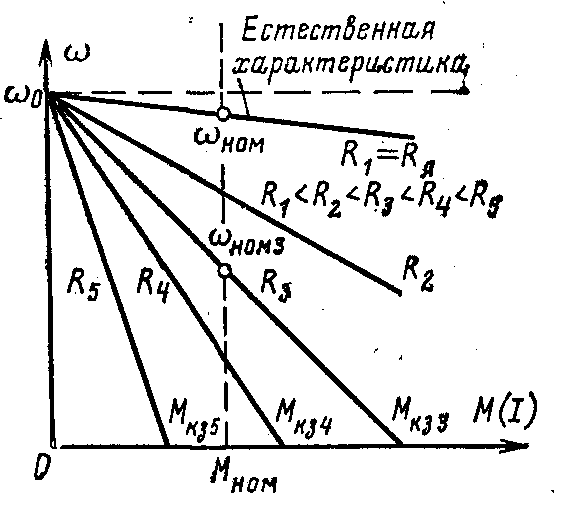
Рис. 6.2. Естественная и реостатные механические характеристики двигателя постоянного тока независимого возбуждения
Как видно из (6.5), при М
= 0 все характеристики
проходят через одну точку, лежащую на
оси ординат. Угловая скорость в этой
точке имеет вполне определенное значение,
не зависящее от сопротивления якорной
цепи. Эта скорость носит название
скорости идеального холостого хода
![]() и
определяется выражением
и
определяется выражением
 (3.8)
(3.8)
При скорости идеального холостого хода, когда ток в якорной цепи равен нулю, ЭДС якоря, направленная навстречу приложенному напряжению, равна ему по абсолютному значению. Если двигатель до приложения нагрузки работал с угловой скоростью , то при появлении на его валу момента сопротивления угловая скорости будет снижаться. Следствием этого будет уменьшение ЭДС вращения Е согласно (6.2) и увеличение тока якоря в соответствии с (6.1) и момента двигателя по (6.4).
Угловая скорость будет снижаться до тех пор, пока момент двигателя не сравняется с моментом сопротивления. Разность значений установившихся скоростей электропривода до и после приложения заданной статической нагрузки называется статическим падением скорости электропривода.
Второй член (3.6) характеризует собой статическое падение угловой скорости относительно угловой скорости идеального холостого хода:
 (6.9)
(6.9)
Таким образом, уравнение для скорости двигателя может быть записано так:
![]() (6.10)
(6.10)
Верхняя характеристика на рис. 3.2, носит название естественной. Она получается при отсутствии внешних резисторов в якорной цепи и номинальных значениях напряжения и магнитного потока двигателя. Жесткость естественной характеристики зависит от внутреннего сопротивления якорной цепи двигателя Rя. Внутреннее сопротивление якорной цепи включает собственное сопротивление якорной обмотки, сопротивление обмотки дополнительных полюсов, компенсационной обмотки и щеток. Соответственно перепад скорости для естественной характеристики
 (6.11)
(6.11)
При дополнительно включенном реостате, имеющем сопротивление Rр, статическое падение скорости определится из соотношения
 (6.12)
(6.12)
Разделив (6.10) на , получим статическое падение скорости в относительных единицах:
 (6.13)
(6.13)
Статическое падение скорости
в относительных единицах
![]() аналогично скольжению асинхронного
двигателя, хотя имеет другой смысл.
аналогично скольжению асинхронного
двигателя, хотя имеет другой смысл.
Построение естественной механической характеристики удобно производят по двум точкам, одна из которых соответствует номинальному электромагнитному моменту двигателя и номинальной скорости (М = Мном и = ном), а другая — скорости идеального холостого хода (М = 0 и = ). Номинальная скорость двигателя определяется по паспортным данным.
Номинальный электромагнитный момент вычисляется по формуле
![]() (6.14)
(6.14)
Скорость идеального холостого хода может быть получена из (6.8), если числитель и знаменатель ее умножить на и учесть, что
![]() (6.15)
(6.15)
Тогда
 (6.16)
(6.16)
Так как в каталогах внутреннее
сопротивление якоря Rя
обычно не указывается,
то его ориентировочно определяют,
принимая, что половина всех потерь в
двигателе при номинальной нагрузке
связана с потерями в меди якоря. Поэтому
![]() .
Отсюда
.
Отсюда
 (6.17)
(6.17)
Пользуясь естественной механической характеристикой, легко построить и реостатную характеристику при любом сопротивлении реостата Rp. Угловая скорость ном,р определяется по формуле
 . (6.18)
. (6.18)
Механическая характеристика может быть построена также по точке идеального холостого хода и точке, соответствующей режиму короткого замыкания, где М = MK3, а скорость = 0. Угловую скорость определяем по (6.15,6.16), а момент Мкз, пренебрегая реакцией якоря, - по формуле
 , (6.19)
, (6.19)
где Iкз = U/R —ток короткого замыкания; R = RЯ + Rp.
С учетом сказанного уравнение механической характеристики представляется в следующем виде:
 . (6.20)
. (6.20)