

Выбор мощности электродвигателя для повторно-кратковременного режима
Режим работы называют повторно-кратковременным, если двигатель так часто включается и выключается, что за время работы не успевает нагреться до установившейся температуры, а за время паузы не успевает остыть до температуры окружающей среды.
На рис. 26.3 показана нагрузочная диаграмма и график перегрева двигателя. Продолжительность включения (%)
ПВ=(tp/tк)100 (26.4)
Выпускают специальные электродвигатели для привода подъемных кранов, металлургических установок, лифтов, работающих в повторно-кратковременном режиме со стандартной продолжительностью включения ПВст = 15, 25, 40, 60%.
Если при продолжительном режиме пуск и остановка не имели большого значения ввиду их малости по сравнению со временем работы, то здесь приходится учитывать отдельно потери при пуске ΔРп торможении ΔРт установившейся скорости ΔРуст и паузе ΔР0. Потери при паузе не всегда равны нулю. Обычно асинхронный двигатель полностью отключается от сети, а в двигателях постоянного тока независимого и параллельного возбуждения, как правило, отключается только обмотка якоря, а обмотка возбуждения остается под током, поэтому потерн хотя и резко снижаются, но, не исчезают совсем. Кроме того, охлаждение неподвижного двигателя при отсутствии вентиляции заметно ухудшается. Средние потери за цикл
ΔРр = (ΔРуст tуст + ΔРп tп + ΔРт tт + ΔР0 t0)( tуст + tп + tт + βt0) (9.13)
где β = 0,5 коэффициент, учитывающий ухудшение охлаждения двигателя во время паузы.
Эти потери определяют номинальную мощность выбираемого двигателя. Его температура должна быть равной или несколько меньшей, чем допустимая для данного класса изоляция.
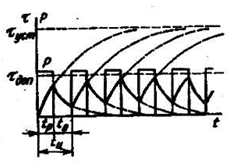
Рис 26.3. Нагрузочная диаграмма и график перегрева двигателя в повторно-кратковременном режиме работы; ip i0 iu – соответственно время работы, пауза и цикл.
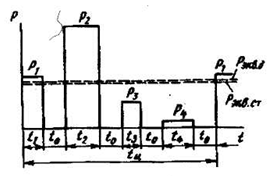
Рис 26.4.Нагрузочная диаграмма
Пример: Нагрузочная диаграмма нагрузочного крана показана на рис 9.8, Р1 = 23кВт; Р2 = 45кВт; Р3 = 11кВт; Р4 = 3кВт; t1 = 18c; t1 = 30c; t1 = 16c; t1 = 28c; t1 = 20c; Выбрать двигатель асинхронный краново-металлургической серии.
Решение.
1) Определяем по нагрузочной диаграмме эквивалентную мощность.

2) Продолжительность включения:
![]()
3) Продолжительность включения оказалась не стандартной. Пересчитаем эквивалентную мощность Pэкв.д, для стандартной ПВ=60%.
![]()
4) Выбираем по каталогу двигатель MTF 412·6 крановый с фазным ротором мощностью 25кВт.
5) Проверяем выбранный двигатель на перегрузочную способность. Для этого сначала определяем частоту вращения при наибольшей нагрузке
![]()
где n1 – синхронная частота вращения (об/мин), P2 – наибольшая нагрузка (Н).
Наибольший момент М2 = 9.55P2/n2 = 9.55·45000/955 = 450 Н·м.
Выбранный двигатель подходит для работы, так как М2 = 450 Н·м, Ммакс = 450 Н·м, т.е. М2< Ммакс.
Допустимое число включений
Подъемно-транспортные устройства, кузнечнопрессовые механизмы, некоторые металлорежущие станки, рольганги работают в очень напряженном повторно-кратковременном режиме и испытывают иногда до 2000 включений в час. Такие двигатели пускаются и тормозятся без применения добавочных резисторов, поэтому переходные процессы протекают быстро. Чем больше ПВ и число включений Л, тем тяжелее режим работы двигателей.
Для крановых электродвигателей установлено пять режимов: Л —легкий (ПВ=15 – 25%, h = 60 1/ч); С — средний (ПВ = 25 – 40%, h = 120 1/ч); Т — тяжелый (ПВ = 40%; h = 240 1/ч); ВТ— весьма тяжелый (ПВ = 60%, h = 600 1/ч); ОТ — особо тяжелый (ПВ = 100%, h = 600 1/ч).
Как было показано выше, пуск и торможение происходят при токах, превышающих номинальное значение, поэтому электрические потери весьма велики, что вызывает интенсивный нагрев и ограничивает число включений в час. Частота включений, при которой средние потери ΔРср равны номинальным потерям двигателя ΔРном, считается допустимым числом включений двигателя при данной нагрузке на валу и данной продолжительности включений.
Для уменьшения нагрева следует применять электродвигатели с небольшим пусковым током, что достигается применением обмоток ротора с повышенным активным сопротивлением. Кинетическая энергия, заключенная в роторе и переходящая в теплоту при торможении, зависит от момента инерции, поэтому целесообразно использовать двигатели с пониженным значением момента инерции. Кроме того, необходимо усиливать теплоотдачу путем применения независимой вентиляции. Следует иметь в виду, что потери при торможении противовключением в три раза больше, чем запасенная кинетическая энергия, поэтому динамическое торможение предпочтительнее.
Эти меры позволяют увеличить допустимое число включений, определяемое как отношение количества теплоты, выделяемой в двигателе за один час при работе в номинальном режиме к количеству теплоты, выделяемой за один цикл: h = Qдоп/Qц = ΔPном/ΔPц, где ΔРном, ΔРц — потери мощности номинальные и за один цикл.
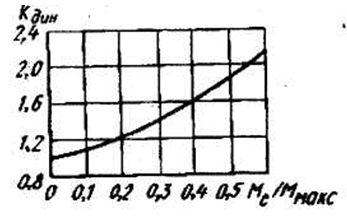
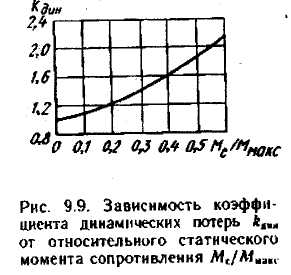
![]()
где kдин — коэффициент динамических потерь, определяемый по графику (рис. 25.5.).
Основная литература
Онищенко, Г. Б. Электрический привод: учебник для вузов / Г. Б. Онищенко .— 2-е изд., стер. — М.: Академия, 2008 .— 288 с. (11экз.)
Ильинский, Н. Ф. Электропривод : энерго- и ресурсосбережение : учеб. пособие для вузов / Н. Ф. Ильинский, В. В. Москаленко .— М. : Академия, 2008 .— 203 с. (21 экз.)
Соколовский, Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для вузов / Г.Г.Соколовский.— 2-е изд., испр. — М. : Академия, 2007 .— 272с.(7 экз.)