

Лекция 2 Механическая часть силового канала электропривода
План лекции:
1. Кинематическая схема электрического привода.
2. Приведение моментов сил сопротивления нагрузки к валу электродвигателя.
Кинематическая схема электрического привода
В большинстве практических случаев в инженерных расчетах при решении задач, не требующих большой точности, и для механических звеньев, обладающих небольшими зазорами и незначительной упругостью (большой жесткостью), можно пренебречь зазорами и упругостью, приняв механические связи абсолютно жесткими. Это дает полную информацию о движении всех остальных элементов, поэтому движение электропривода можно рассматривать на каком-либо одном механическом элементе. Обычно и качестве такого элемента принимают вал двигателя.
Расчетную схему механической части
привода, следовательно, можно свести к
одному обобщенному жесткому механическому
звену, имеющему эквивалентную массу с
моментом инерции J, на
которую воздействует электромагнитный
момент двигателя М и суммарный приведенный
к валу двигателя момент сопротивления
(статический момент)
![]() ,
включающий все механические потери в
системе, в том числе механические
потери в двигателе.
,
включающий все механические потери в
системе, в том числе механические
потери в двигателе.
Момент сопротивления механизма
![]() ,
(рис. 2.1), возникающий на валу рабочей
машины, состоит из двух слагаемых,
соответствующих полезной работе и
работе трения.
,
(рис. 2.1), возникающий на валу рабочей
машины, состоит из двух слагаемых,
соответствующих полезной работе и
работе трения.
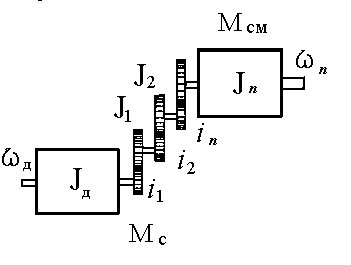
Рис. 2.1. Кинематическая схема связи двигателя с исполнительным механизмом.
Полезная работа, совершаемая исполнительным механизмом, связана с выполнением соответствующей операции. График полезной работы может быть построен на основании аналитических расчетов или по экспериментальным данным. При совершении полезной работы происходит деформация материала или изменяется запас потенциальной энергии тел, например в подъемных устройствах.
Работа трения, совершаемая в исполнительном механизме, определяет обычно КПД механических связей привода. Работу трения можно иногда учесть, пользуясь данными, полученными на основании опыта.
Моменты сопротивления можно разделить на две категории: 1) реактивные моменты и 2) активные или потенциальные моменты.
В первую категорию включаются моменты сопротивления от сжатия, резания, моменты трения и т. п., препятствующие движению привода и изменяющие свой знак при изменении направления вращения.
Во вторую категорию входят моменты от силы тяжести, а также от растяжения, сжатия и скручивания упругих тел. Эти моменты могут быть названы потенциальными, поскольку они связаны с изменением потенциальной энергии отдельных элементов привода. Потенциальные моменты могут тормозить движение привода или, наоборот, способствовать его движению. Следует отметить, что в отличие от реактивного статического момента активный момент сохраняет свой знак при изменении направления вращения привода.
ПРИВЕДЕНИЕ МОМЕНТОВ СИЛ И СИЛ СОПРОТИВЛЕНИЯ
Нагрузки к валу электродвигателя
Приведение моментов сопротивления от
одной оси вращения к другой может быть
произведено на основании энергетического
баланса системы. При этом потери мощности
в промежуточных передачах учитываются
введением в расчеты соответствующего
КПД —
![]() .
Обозначим через
.
Обозначим через
![]() угловую скорость вала двигателя, а
угловую скорость вала двигателя, а
![]() — угловую скорость вала производственного
механизма. На основании равенства
мощностей получим:
— угловую скорость вала производственного
механизма. На основании равенства
мощностей получим:
![]() ,
(2.1)
,
(2.1)
откуда
![]() ,
(2.2)
,
(2.2)
где
![]() — момент сопротивления исполнительного
механизма, Н*м;
— момент сопротивления исполнительного
механизма, Н*м;
—тот
же момент сопротивления, приведенный
к скорости вала двигателя, Н*м;
![]() — передаточное число редуктора.
— передаточное число редуктора.
При наличии нескольких передач между
двигателем и механизмом с передаточными
числами
![]() и соответствующими КПД
и соответствующими КПД
![]() момент сопротивления, приведенный
к скорости вала двигателя, определяется
по формуле
момент сопротивления, приведенный
к скорости вала двигателя, определяется
по формуле
![]() (2.3)
(2.3)
Приведение сил сопротивления производится
аналогично приведению моментов. Если
скорость поступательного движения
v, м/с, а угловая скорость
вала двигателя
![]() ,
рад/с, то
,
рад/с, то
![]() ,
(2.4)
,
(2.4)
где
![]() — сила сопротивления производственного
механизма, Н.
— сила сопротивления производственного
механизма, Н.
Отсюда приведенный к скорости вала двигателя момент сопротивления равен:
![]() . (2.5)
. (2.5)
В случае приведения вращательного движения к поступательному приведенное усилие
![]() .
(2.6)
.
(2.6)
Пример 1.
Подъемное устройство (рис. 2.2) поднимает
груз массой m = 550 кг.
Двухступенчатый редуктор имеет
передаточные числа ступеней:  КПД ступеней:
КПД ступеней: ![]() Диаметр барабана
Диаметр барабана ![]() ,
а КПД в месте трения его о трос
,
а КПД в месте трения его о трос ![]() .
Угловая скорость двигателя
.
Угловая скорость двигателя ![]() – момент на валу,
– момент на валу,![]() – угловая скорость этого вала. Определить
линейную скорость
– угловая скорость этого вала. Определить
линейную скорость
![]() груза, мощность P и
момент M электродвигателя.
груза, мощность P и
момент M электродвигателя.

Рис 2.2 . Кинематическая схема подъемного устройства:
1‘ , 1’’ – муфты; 2’ , 2’’ – шестерни; 3’ , 3’’ – валы; 4’ , 4’’ – колеса; 5’ , 5’’ – барабан.
Решение:
1 Угловая скорость барабана:
![]()

2 Линейная скорость груза:  .
.
3 Статический момент на валу барабана:
 Hm
или
Hm
или 
4 Статический момент, приведенный к валу
двигателя  Hm.
Hm.
5 Мощность на валу двигателя ![]() Вт.
Вт.