

Лекция 15 Выбор электродвигателЯ для кратковременного и повторно-кратковременного режима
План лекции:
1. Выбор мощности электродвигателя для кратковременного режима.
2. Выбор мощности электродвигателя для повторно-кратковременного режима.
Выбор мощности электродвигателя для кратковременного режима
Режим считается кратковременным, если за время работы двигатель не успевает нагреться до установившейся температуры, а за время паузы t0 успевает остыть до температуры окружающей среды. Такие режимы встречаются довольно часто, например, в приводе разводных мостов. Створки моста поднимаются в течение нескольких минут, затем двигатели останавливаются и охлаждаются. Проход судов длится несколько часов, двигатели за это время успевают полностью остыть. Когда створки опускаются, двигатели снова работают кратковременно. В таком режиме работают также двигатели заводских ворот, задвижки на трубопроводе, зажимного устройства металлорежущих станков.
На рис. 26.1,а,б показана нагрузочная диаграмма при кратковременном режиме работы и график перегрева. Использовать электродвигатель с номинальной мощностью Рном = Pк нецелесообразно, так как он не успеет нагреться до своей допустимой температуры (рис. 26.1,б). Лучше применить двигатель с меньшей мощностью, т. е. Рном < Pк. Тогда, работая с перегрузкой, он будет интенсивно нагреваться. Однако за малое время tк двигатель не успеет достичь опасных температур.
Нормальные двигатели, предназначенные для длительной работы, мало пригодны для кратковременного режима, так как обладают относительно небольшой перегрузочной способностью. Поэтому выпускают специальные двигатели, предназначенные для кратковременной работы, например, в течение 15, 30, 60 мин. Они обладают не только высокой перегрузочной способностью, но имеют усиленный коллектор и меньшую плотность тока в обмотке возбуждения. Это объясняется тем, что коллектор и последовательная обмотка возбуждения в машинах постоянного тока имеют постоянную времени нагрева Tк значительно меньшую, чем обмотка якоря. Поэтому с ни нагреваются быстрее и ограничивают допустимое время работы tдоп.
Однако двигатели для кратковременного режима работы крупными сери л ми, рассчитанными на универсальное применение, не выпускаются. Поэтому приходится использовать двигатели продолжительного режима, если tк > 15 мин, и двигатели повторно-кратковременного режима, если
tк < 1,5 – 2,5 мин.
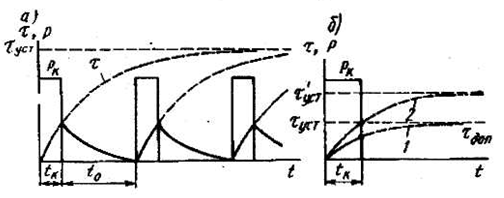
Рис 26.1. Нагрузочная диаграмма (а) и график перегрева двигателя (б) при кратковременной нагрузки. 1 – номинальной нагрузки; 2 – при перегрузки.
Задача выбора двигателя сводится к определению времени tдоп при котором перегруженный двигатель нагревается до допустимой температуры Тдоп, (допустимый перегрев τдоп). Если и окажется меньше tдоп то двигатель выбран правильно; если tк > tдоп то приходится выбирать двигатель с большей мощностью и снова повторять расчет. Если нагрузочная диаграмма многоступенчата, то предварительно определяют эквивалентное значение мощности.
Порядок расчета.
1) Двигатель выбираем с номинальной мощностью Рном < Рк ориентируясь на перегрузочную способность так, чтобы максимальный момент Ммакс указанный в каталоге, был на 15—20% больше момента Мк. Момент Ммакс = МномМ*макс , где Мном = 9,55 Рном/n; Мк = 9,55Рк/nк
2) Потери выбранного двигателя при номинальном режиме
![]()
3) Потери при перегрузке двигателя, работающего с мощностью Р*
![]() (26.1)
(26.1)
здесь nк определяется по рабочим характеристикам, указанным » каталоге (см. пример 9.1, метод средних потерь).
4) Коэффициент тепловой перегрузки
![]() (26.2)
(26.2)
5) Постоянную времени, если она не указана в каталоге на выбранный двигатель, находим по графику (рис. 26.2.).
6) Допустимое время работы двигателя с перегрузкой
![]() (26.3)
(26.3)
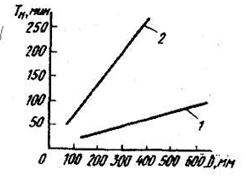
Рис 26.2. Зависемость постоянной времени нагрева Тн обмоток якоря
и ротора от их диаметра D.
Если окажется, что tдоп ≥ tк то выбранный двигатель пригоден для работы. Если же tдоп < tк то выбираем по каталогу следующий двигатель большей мощности и повторяем расчет.