

16.1. Механические характеристики двигателя постоянного тока независимого возбуждения при различных напряжениях.
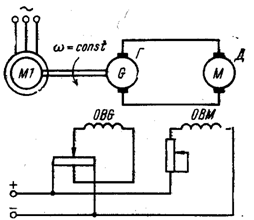
16.2. Принципиальная схема включения двигателя постоянного тока независимого возбуждения по системе г-д.
Якорь двигателя М присоединяется к якорю генератора G непосредственно. Электродвижущая сила генератора определяется по формуле
![]()
где kг — коэффициент, зависящий от конструктивных данных генератора и определяемый по формуле
где pг — число пар полюсов; Nг — число активных проводников обмотки якоря; аг — число параллельных ветвей обмотки якоря. Следовательно, при постоянной угловой скорости генератора г ЭДС его будет определяться магнитным потоком, который легко регулируется током возбуждения.
Пользуясь схемой замещения для рассматриваемого случая (рис. 16.3,а), можно составить уравнение равновесия ЭДС
![]() (16.3.)
(16.3.)
или
![]() (16.4.)
(16.4.)
где Е и I — ЭДС двигателя и ток якорной цепи машин; Rг, Rд — соответственно сопротивление якоря генераторе и двигателя.
Отсюда угловая скорость двигателя
 (16.5.)
(16.5.)
 (16.6.)
(16.6.)
При неизменном потоке двигателя
![]()
где  (16.7)
(16.7)
Механические характеристики двигателя при неизменном потоке двигателя и изменении потока генератора (без учета реакции якоря) представляют собой семейство линейных характеристик, наклон которых остается постоянным и определяется общим сопротивлением якорной цепи.
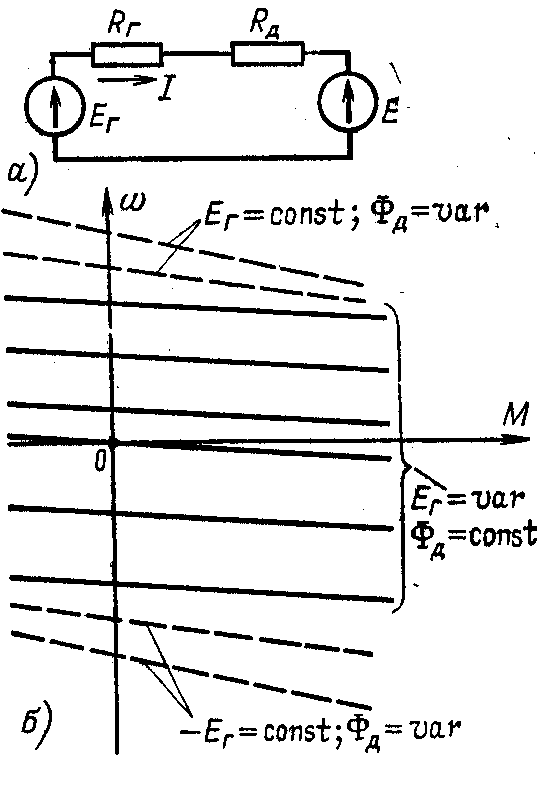
Рис. 16.3. Схема замещения (а) и характеристики (б) при двухзонном регулировании угловой скорости двигателя постоянного тока независимого возбуждения, включенного по системе Г — Д
Скорость идеального холостого хода определяется по формуле

и
может приобретать любое значение от
до  ;
Отрицательное значение
ЭДС генератора легко может быть получено
при реверсировании тока возбуждения
изменением полярности напряжения на
обмотках возбуждения генератора.
;
Отрицательное значение
ЭДС генератора легко может быть получено
при реверсировании тока возбуждения
изменением полярности напряжения на
обмотках возбуждения генератора.
Механические характеристики двигателя располагаются в четырех квадрантах; основным достоинством этой системы является плавность регулирования, которая осуществляется воздействием на цепь возбуждения.
Система Г—Д может обеспечить двухзонное регулирование угловой скорости — до основной скорости изменением ЭДС генератора при постоянном потоке двигателя, а выше основной регулированием тока возбуждения двигателя при постоянной, равной номинальному значению ЭДС генератора. Характеристики, соответствующие первой зоне регулирования, показаны на рис. 16.3. б сплошными линиями, а второй зоне — штриховыми.
Верхний предел угловой скорости при регулировании с постоянным потоком двигателя ограничивается номинальным значением ЭДС генератора и тем перепадом скорости, который обусловлен нагрузкой и сопротивлением якорной цепи. Нижний предел регулирования определяется заданным относительным перепадом угловой скорости при заданном изменении нагрузки; этот относительный перепад, называемый статизмом, определяется при минимальной угловом скорости для случая изменения момента нагрузки от нуля до Мном как
 (16.8.)
(16.8.)
Или
 (16.9.)
(16.9.)
Отсюда допустимый диапазон регулирования
 (16.10.)
(16.10.)
где ![]() – относительный перепад угловой скорости
при
– относительный перепад угловой скорости
при ![]()
Если, например, для машин
средней мощности относительный
перепад принять равным ![]() ,
то при допустимом статизме δ = 0,2 допустимый
диапазон регулирования составит всего
D
= 2:1, если же задаться
еще меньшим статизмом
,
то при допустимом статизме δ = 0,2 допустимый
диапазон регулирования составит всего
D
= 2:1, если же задаться
еще меньшим статизмом ![]() ,
то осуществлять регулирование нельзя,
так как
,
то осуществлять регулирование нельзя,
так как ![]() .
.