Лекция 11 регулирование изменением напряжения на якоре
План лекции:
1. Регулирование изменением напряжения на якоре.
2. Система «генератор-двигатель».
Регулирование угловой скорости изменением напряжения на якоре осуществляется вниз от основной характеристики, так как напряжение, прикладываемое к якорю, в большинстве случаев может изменяться только вниз от номинального (иногда, например, при регулировании угловой скорости двигателя с постоянными магнитами возможно регулирование как вниз, так и вверх).
Допустимый момент без учета ухудшений условий вентиляции со снижением угловой скорости остается постоянным, так как допустимый ток якоря равен номинальному, а поток при независимом возбуждении остается номинальным.
Для различных значений напряжений угловая скорость двигателя равна:
Их отношение равно
 (16.1)
(16.1)
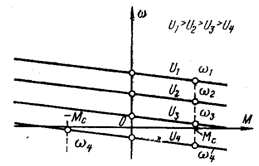
Отсюда следует, что при изменении напряжения регулировочные характеристики располагаются параллельно друг другу, т.е. имеют одинаковую жесткость (как показано на рис. 16.1), что определяет относительно высокую стабильность угловой скорости. Диапазон регулирования
 (16.2)
(16.2)
где Uном и Umin — номинальное и минимальное напряжения.
Из (16.2) следует, что относительный перепад угловой скорости растет со снижением напряжения; это ограничивает диапазон регулирования значением D = (8÷10) : 1 в системах привода без обратных связей (в замкнутых системах диапазон регулирования существенно больше и может достигать значений 1000:1 и более).
Плавность регулирования
определяется плавностью изменения
напряжения питания и обычно характеризуется
значением коэффициента плавности
![]() .
.
Коэффициент полезного действия двигателя в данном случае (без учета потерь на возбуждение) равен отношению фактической угловой скорости двигателя к угловой скорости идеального холостого хода на заданной характеристике. Потери мощности в якорной цепи при постоянном моменте нагрузки остаются неизменными при регулировании угловой скорости и равными потерям при работе на естественной характеристике. Но поскольку полезная мощность по мере снижения угловой скорости уменьшается, то и КПД двигателя падает. Вследствие малых потерь мощности в цепи якоря этот способ регулирования скорости является экономичным. Однако для полной оценки экономичности необходимо учитывать потери мощности еще в устройстве, посредством которого регулируется напряжение на якоре двигателя, и затраты на это устройство.
Так как напряжение питающей сети поддерживается постоянным, то указанный способ регулирования возможен при использовании соответствующего преобразователя с регулируемым напряжением постоянного тока на его выходе, например, в системе генератор — двигатель (Г—Д) или управляемый выпрямитель — двигатель (УВ – Д).
Система «генератор-двигатель»
Принципиальная схема включения двигателя постоянного тока с независимым возбуждением по системе Г—Д приведена на рис. 16.2. Здесь генератор G с постоянной угловой скоростью приводится во вращение асинхронным или синхронным двигателем Ml; питание цепей возбуждения генератора G и исполнительного двигателя М осуществляется от независимого источника постоянного тока.