

Лекция 9 способы регулирования угловой скорости. Регулирование угловой скорости электропривода постоянного тока с двигателем независимого возбуждения
План лекции:
1. Рассказать о регулировании угловой скорости изменением
магнитного потока.
Регулирование угловой скорости изменением магнитного потока
Из уравнения электропривода
![]()
вытекает, что возможны три принципиально различных способа регулирования угловой скорости двигателя:
1) изменением тока возбуждения (магнитного потока) двигателя;
2) изменением сопротивления цепи якоря посредством резисторов (реостатное);
3) изменением подводимого к якорю двигателя напряжения.
Регулирование угловой скорости двигателя изменением тока возбуждения является одним из наиболее простых и экономичных способов. Мощность, потребляемая обмоткой возбуждения двигателя, составляет примерно 2—2,5 % мощности двигателя, поэтому этот способ находит широкое применение в современной практике электропривода.
Принципиальные схемы электропривода при регулировании тока возбуждения показаны на рис.14.1. Ток возбуждения регулируется или с помощью резистора (рис 14.1, а) в случае двигателей малой мощности, или посредством регулятора напряжения РН (рис. 14.1,б). Регулирование скорости в этом случае осуществляется вверх от основной, причем допустимый момент двигателя изменяется по закону гиперболы, а допустимая мощность остается неизменной. Так как допустимая нагрузка определяется током, равным номинальному, то мощность, развиваемая двигателем, постоянна (Р = Рном = const) независимо от магнитного потока (тока возбуждения). Электромеханическим характеристикам = f (I) при изменении тока возбуждения соответствуют различные значения угловой скорости идеального холостого хода, определяемые по формуле
![]()
На рис. 14.2 по оси ординат
отложено значение угловой скорости
идеального холостого хода
для естественной характеристики, когда
поток Ф=Фном.
Значения угловых скоростей идеального
холостого хода при ослабленном потоке
лежат, очевидно, выше
![]() .
Все электромеханические характеристики
пересекаются с осью абсцисс в одной
точке.
.
Все электромеханические характеристики
пересекаются с осью абсцисс в одной
точке.
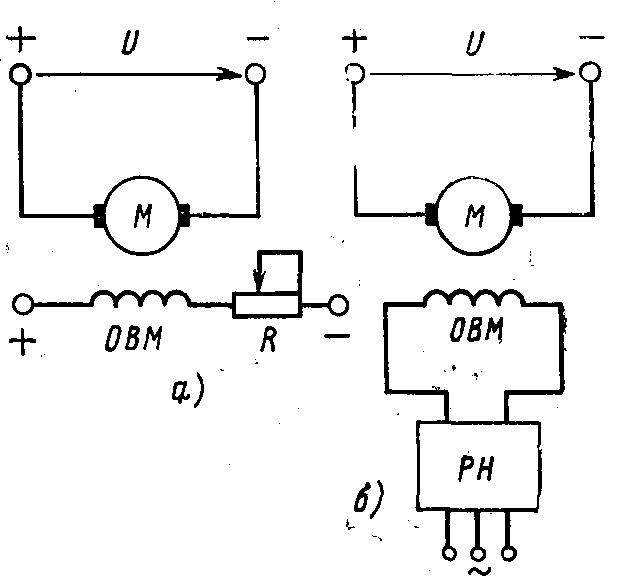
Рис. 14.1. Принципиальные схемы электропривода при регулировании угловой скорости изменением магнитного потока с помощью резистора (а)
и регулятора напряжения РН (б)
Последнее следует из того, что при = 0 уравнение для любой электромеханической характеристики имеет вид:
Следовательно, при различных токах возбуждения и при угловой скорости двигателя, равной нулю, ток в якорной цепи равен току короткого замыкания двигателя. Этим значением тока и определяется общая точка пересечения электромеханических характеристик.
Механические характеристики, показанные на рис. 14.3, имеют те же значения угловых скоростей идеального холостого хода, что и для электромеханических характеристик. Однако эти характеристики не пересекаются в одной точке на оси абсцисс, так как по мере уменьшения потока уменьшается и момент короткого замыкания, определяемый по формуле
![]()
Регулирование является экономичным при постоянной мощности; полному использованию двигателя соответствуют точки, находящиеся на линии номинального тока Iс = Iном (см. рис. 14.2). Этому соответствуют точки, лежащие на гиперболической кривой момента сопротивления Мс, как это показано пунктиром на рис. 14.3.
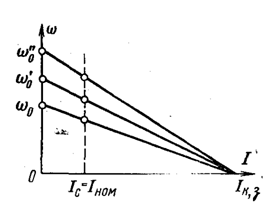
Рис 14.2. Электромеханические характеристики двигателя постоянного тока независимого возбуждения при регулировании угловой скорости током возбуждения
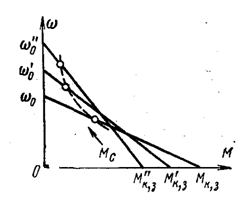
Рис. 14.3. Механические характеристики двигателя постоянного тока независимого возбуждения при регулировании угловой скорости током возбуждения
При работе на угловых скоростях, соответствующих точкам, лежащим левее указанной кривой момента Мс, двигатель будет недогружен: напротив, работа на скоростях правее этой кривой приведет к перегрузке двигателя.
Любопытно отметить, что при малых моментах нагрузки угловая скорость с ослаблением поля растет, а при больших уменьшается.
При постоянном моменте сопротивления (Мс = const) и длительной нагрузке двигатель нужно выбирать так, чтобы при наибольшей угловой скорости ток в цепи якоря, но превосходил номинального. При сниженных угловых скоростях в этом случае приходится мириться с недогрузкой двигателя, так как ток в якоре становится меньше номинального вследствие возрастания магнитного потока.
Обычно регулируемые двигатели имеют диапазон регулирования от 2:1 до 5:l, в ряде случаев до (8÷10): 1.
Диапазон регулирования ограничивается различными факторами. Главным из них является ухудшение условий коммутации с возрастанием угловой скорости, поскольку реактивная ЭДС, вызывающая искрение на коллекторе, пропорциональна току и угловой скорости, т. е. Ер = сIw. Кроме того, при больших угловых скоростях требуется повышать механическую прочность якоря. Нижний предел угловой скорости ограничивается степенью насыщения машины и нагревом обмотки возбуждения, т. е. номинальной угловой скоростью.
Плавность регулирования в пределах заданного диапазона может быть получена весьма значительной и определяется количеством ступеней регулировочного реостата или же числом ступеней специальных устройств, регулирующих напряжение, подводимое к обмотке возбуждения. Посредством этих же устройств или посредством ползункового реостата (при малой мощности двигателя) можно получить плавное регулирование.
Широко используется также импульсное параметрическое регулирование тока возбуждения, при котором в цепь обмотки возбуждения с определенной частотой и изменяемой продолжительностью обычно посредством полупроводникового ключа (транзистора, тиристора) или реле (контактора) вводится добавочный резистор с постоянным сопротивлением. Изменяя продолжительность включенного состояния резистора (или ключа, шунтирующего резистор) при заданной частоте включения, можно получить плавное регулирование угловой скорости в диапазоне (2÷3) : 1 и более.
Стабильность угловой скорости при регулировании определяется относительным перепадом угловой скорости при изменении нагрузки и в данном случае при номинальном токе якоря как ∆wном/w0 = IномRяU, поэтому независимо от тока возбуждения относительный перепад сохраняется одним и тем же для естественной и искусственной характеристик, т. е. угловая скорость сравнительно стабильна.