

Механическая и угловая характеристики синхронного электропривода
Обычно синхронные двигатели работают при постоянной частоте с неизменной угловой скоростью. Достоинство синхронного двигателя, заключающееся в возможности работать с высоким коэффициентом мощности.

Рис 11.1. Схема включения (а) и механическая характеристика (б) синхронного двигателя.
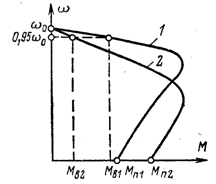
Рис 11.2. Пусковые характеристики синхронного двигателя
Угловая скорость, при работе в установившемся режиме с возрастанием нагрузки на валу до определенного значения, не превышающего максимального момента Мmах, равна синхронной угловой скорости:
![]() (11.1)
(11.1)
Механическая характеристика имеет вид прямой линии, параллельной оси абсцисс (рис. 11.1,б). Если момент нагрузки превышает Мmах, то двигатель может выпасть из синхронизма.
Синхронные двигатели имеют в роторе, кроме нормальной рабочей обмотки, питаемой постоянным током, еще и пусковую короткозамкнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, и поэтому в пусковых режимах он обладает асинхронной характеристикой. На рис. 11.2 представлены пусковые характеристики синхронного двигателя, одна из них 1 соответствует пуску с пониженным начальным пусковым моментом Мп1 и значительным «входным» моментом Мв1, под которым понимается момент, развиваемый при скорости, равной 0,95 0. При этой скорости возможно вхождение двигателя в синхронизм после включения постоянного тока в обмотку возбуждения.
Если пусковая клетка имеет увеличенное активное сопротивление, то начальный пусковой момент Мп2 будет больше, чем в предыдущем случае, а входной момент Мв2 уменьшится (кривая 2).
При пульсации нагрузки на валу двигателя изменяется угол между напряжением и ЭДС синхронной машины. С увеличением нагрузки этот угол возрастает. Вначале с увеличением угла θ растет и развиваемый двигателем момент (рис. 11.3), что удовлетворяет требованию устойчивой работы двигателя. В правой части графика при θ > 90° условие устойчивой работы двигателя нарушается, так как при увеличении нагрузки угол продолжает возрастать, а момент, развиваемый двигателем, уменьшается, вследствие чего двигатель выпадает из синхронизма.
Номинальному моменту двигателя Mном практически соответствует угол θном=30÷25°. При этом кратность максимального момента к номинальному составляет:
![]() (11.1)
(11.1)
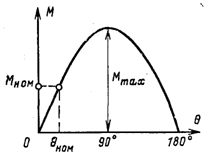
Рис 11.3. Угловая характеристика синхронного двигателя
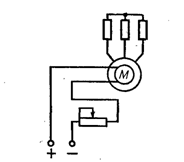
Рис 11.4. Принципиальная схема включения синхронного двигателя при динамическом торможении
В специальных случаях применяют синхронные машины и с большей кратностью максимального момента, достигающей 3,5—4.
Синхронный двигатель может работать и в режиме генератора параллельно с сетью при синхронной угловой скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение, чему отвечает левая ветвь характеристики на рис. 11.1,б. Для торможения такой режим практического значения не имеет, так как при этом нельзя получить снижения скорости.
Обычно применяется динамическое торможение синхронных двигателей, при котором обмотки статора отключаются от сети и замыкаются на резисторы (рис. 11.4). Механические характеристики в этом случае подобны характеристикам асинхронного двигателя при динамическом торможении. Интенсивность торможения зависит от сопротивления статорной цепи и от потока, создаваемого током роторной обмотки. Время торможения при питании цепей возбуждения от собственного возбудителя, находящегося на валу синхронного двигателя, больше, чем при питании от независимого источника постоянного тока. Объясняется это тем, что при снижении угловой скорости возбудителя уменьшается его ЭДС, а, следовательно, уменьшаются ток возбуждения двигателя и тормозной момент.
Торможение синхронных двигателей противовключением практически не применяется, так как оно сопровождается большими толчками тока и ведет к усложнению управления ввиду необходимости отключения двигателя при подходе к нулевой скорости.