

МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Тульский государственный университет»
Институт высокоточных систем им. В.П. Грязева
Кафедра «Приборы управления»
|
Утверждаю Декан САУ факультета __________________ А.Э.Соловьев “____”________________ 201___ г.
|
Родионов в.И.
д.т.н., профессор
Конспект лекций
дисциплины
«Электрический привод»
Направление подготовки: 140400 «Электроэнергетика и электротехника»
Профиль подготовки: «Электрооборудование летательных аппаратов»
Квалификация выпускника: 62 бакалавр
Форма обучения: очная
Тула 2011 г.
Конспект лекций составлен профессором, д.т.н. В.И. Родионовым и обсужден на заседании кафедры «Приборы управления» факультета систем автоматического управления
протокол № __________ от «____»___________________2011 г.
Зав. кафедрой ______________________________ В. Я. Распопов
Конспект лекций пересмотрен и утвержден на заседании кафедры ПУ факультета САУ
протокол № ________ от «______» _____________________201 г.
Зав. кафедрой ______________________________ В. Я. Распопов
Содержание
Лекция 1. Электрический привод как система……….……………………….5
Лекция 2. Механическая часть силового канала электропривода. Приведение моментов инерции нагрузки к валу двигателя …………………………….….10
Лекция 3. Механические характеристики производственных механизмов
и электрических двигателей ……………………………………...……………18
Лекция 4. Уравнение движения электропривода ……………………………27
Лекция 5.Механические характеристики электропривода постоянного тока с двигателем независимого, последовательного и смешанного возбуждения……………………………………………………………….……34
Лекция 6. Тормозные режимы двигателей постоянного тока независимого
последовательного и смешанного возбуждения ………………………...……46
Лекция 7. Механические характеристики асинхронного и синхронного электропривода………………………………………………………………....57
Лекция 8. Переходные режимы в электроприводах. Пуск двигателя постоянного тока независимого возбуждения.. Ударное приложение нагрузки ………………………………………………………….……………...68
Лекция 9 .Способы регулирования угловой скорости. Электрическая часть силового канала электропривода. Регулирование угловой скорости электропривода постоянного тока с двигателем независимого возбуждения
Регулирование угловой скорости изменением магнитного потока…………..85
Лекция 10. Реостатное и импульсное параметрическое регулирование …...91
Лекция 11. Регулирование изменением напряжения на якоре. Управляемые выпрямители ……………………………………………………………..…….96
Лекция 12. Широтно-импульсные преобразователи и шунтирование якоря …………………………………………………………………………….113
Лекция 13. Регулирование угловой скорости двигателя постоянного тока последовательного возбуждения ……………………………………………..124
Лекция 14. Выбор электродвигателя длительного режима…..………….…131
Лекция 15. Выбор электродвигателя для кратковременного и повторно-кратковременнного режима……………………………………………………144
Лекция 1
Электрический привод как система План лекции:
1. Функциональная схема автоматизированного электропривода.
2. Типы электроприводов.
Функциональная схема автоматизированного электропривода
Функциональная схема автоматизированного электропривода приведена на рис.1.1.
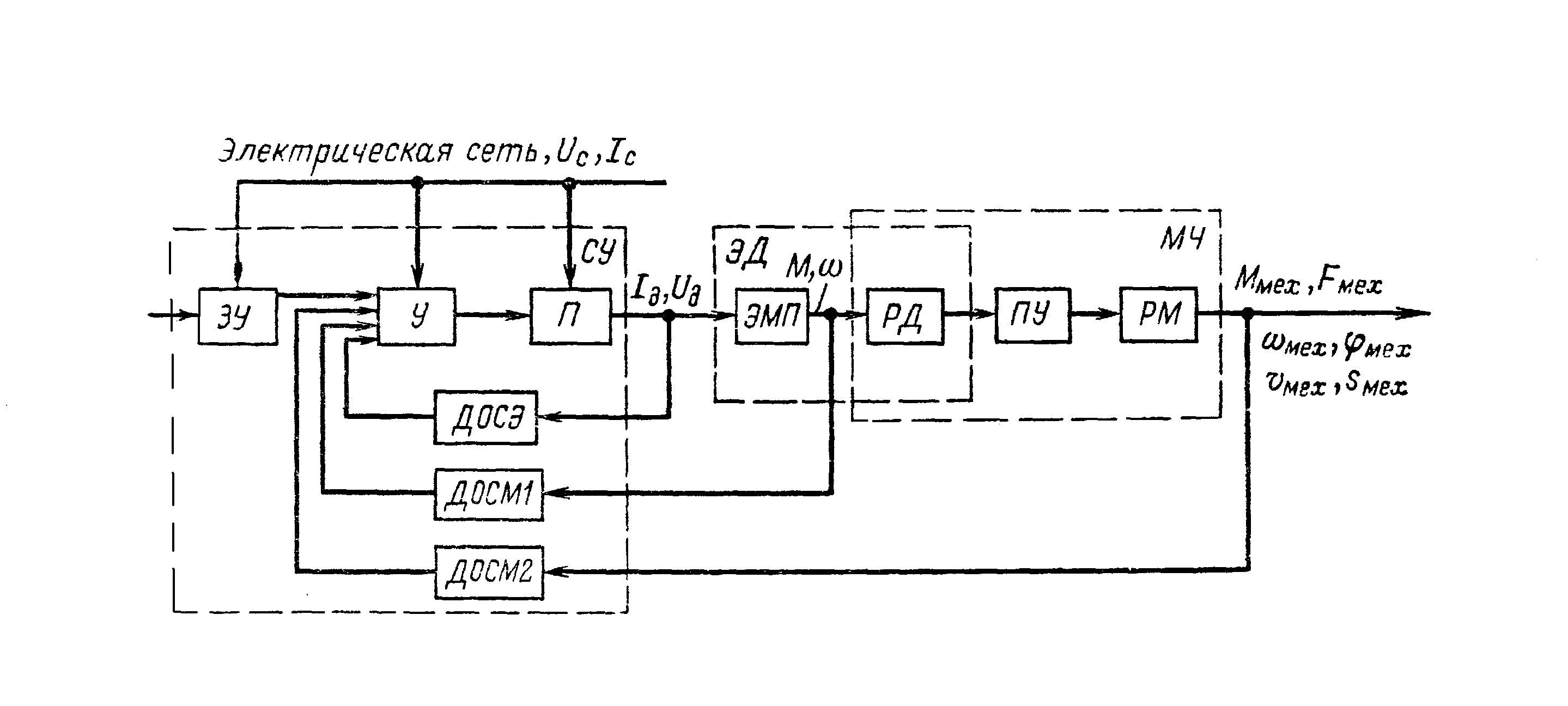
Рис. 1.1. Функциональная схема автоматизированного электропривода
В ней можно выделить три основных части:
1) механическая часть привода (МЧ), включающая рабочий механизм (РМ), передаточное устройство (ПУ), предназначенное для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и для изменения вида и скорости движения и усилия (момента вращения);
2) электродвигатель (ЭД), предназначенный для преобразования электрической энергии в механическую. На схеме электродвигатель представлен двумя элементами: электромеханическим преобразователем энергии ЭМП (на вход которого подаются электрические сигналы в виде напряжения и тока), преобразующим электрическую мощность в механическую мощность, и массой ротора двигателя РД, на которую воздействует момент М двигателя при угловой скорости ω;
3) система управления (СУ), состоящая из силовой преобразовательной части (П), управляющего устройства (У), задающего устройства (ЗУ) и датчиков обратных связей — электрических (ДОСЭ) и механических (ДОСМ1) и (ДОСМ2). Преобразователь П предназначен для питания двигателя и создания управляющего воздействия на него. Он преобразует род тока или напряжение, или частоту либо изменяет иные показатели качества электрической энергии, подводимой к двигателю. Устройство У, управляющее преобразователем П, получает командные сигналы от задающего устройства ЗУ, а информацию о текущем состоянии электропривода — от датчиков обратных связей. С помощью этих датчиков ток, напряжение, мощность двигателя или другие его электрические параметры, скорость, момент или усилие и положение (перемещение) исполнительного органа, преобразуются в пропорциональные этим параметрам электрические сигналы, которые и подаются в управляющее устройство У. В нем текущее состояние электропривода сравнивается с заданным и при наличии рассогласования вырабатывается управляющий сигнал, воздействующий через преобразователь П на электропривод в направлении устранения возникшего рассогласования с требуемой точностью и быстродействием.