

41.Передачи винт-гайка
Предназначена для преобразования вращательного движения в поступательное или наоборот.
Основные элементы: винт и гайка.
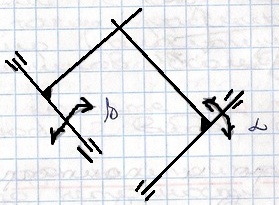
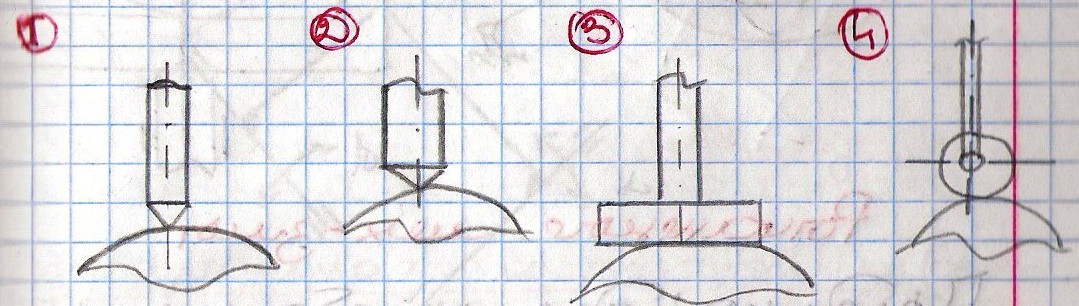
Основные конструктивные схемы:
В
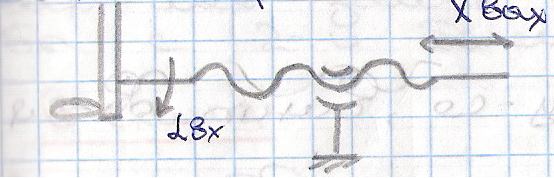 инт
вращается и движется поступательно
инт
вращается и движется поступательно
Пример: приборы перемещения.
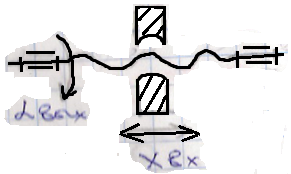
Винт вращается, гайка движется поступательно:
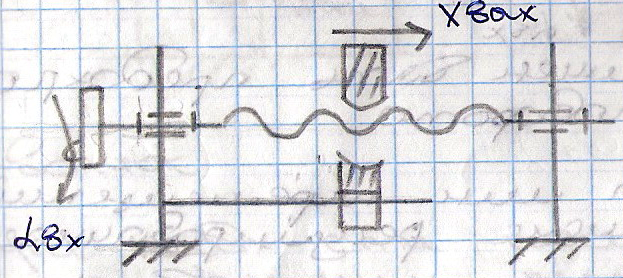
-привод
-перемещение столов
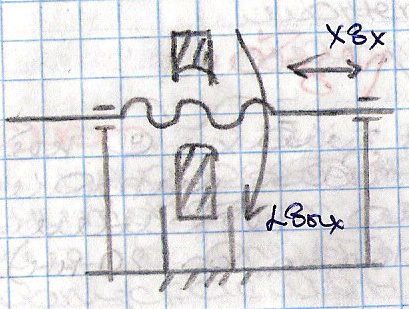
Гайка вращается и перемещается поступательно:
-механизмымы настройки оптики на резкость
-регулировочные элементы приборов
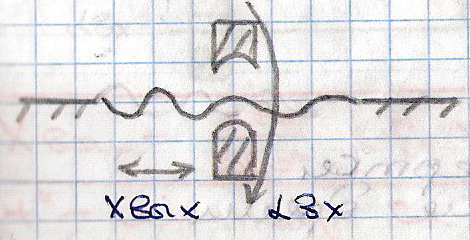
Гайка вращается, винт движется поступательно (винт должен быть предохранён от проворотов):
-механизмы мин перемещений, в том числе и регулирования.
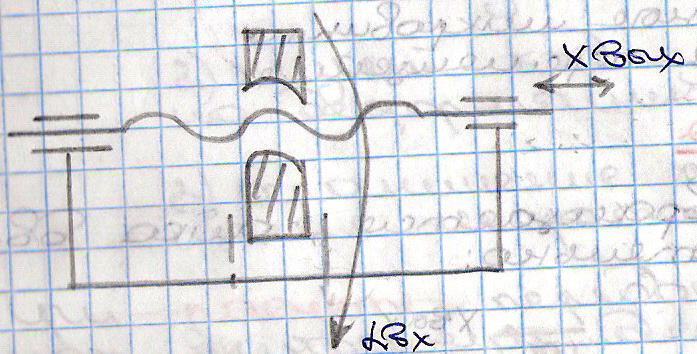
Гайка перемещается поступательно, винт вращается:
-ударные отвёртки
-механические дрели.
Угол подъема витков резьбы должен быть настолько большим,чтобы исключить самоторможение, поэтому в таких механизмах используют резьбы с двумя и более заходами.
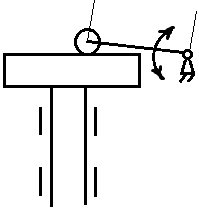
Винт движется поступательно, гайка вращается:
-волчок
При необходимости получить механизм с большим передаточным отношением используют дифффиренциальные механизмы, с малым - интегральные.
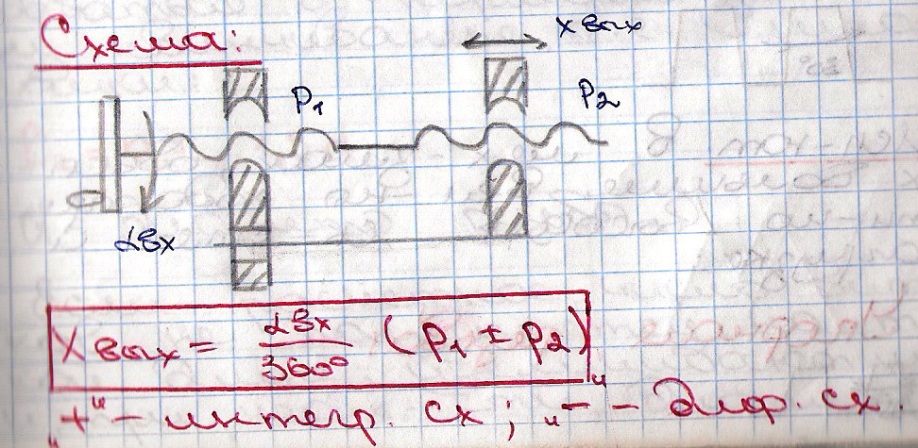
В дифференциальном механизме направление резьб Р1 и Р2 одинаковое, в интегральной – противоположное.
42. Рычажные механизмы
Назначение: передача и преобразование движения, выполнение математических операций, воспроизведение заданных траекторий или математических кривых.
Рычажный механизм состоит из рычагов, шарниров и поступательно движущихся элементов.
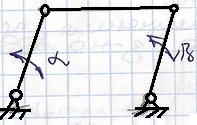
Основные разновидности:
С
 инусный
и тангенсный
инусный
и тангенсный

синусный
тангенсный
Кривошипно-ползунный
Шарнир на 4ёх звеньях 6. Поводковый
Кулисный
Наиболее часто используется в виде мальтийского механизма для получения непрерывного движения.
Инверсоры (для воспроизведения кривых), пантографы (для воспроизведения кривых, подобных исходной кривой), прямолинейно-направляющие механизмы (для получения прямолинейной траектории).
Достоинства:
Надежность
простота конструкции
компактность в одном из измерений.
Недостатки:
большие габариты
нелинейная функция преобразования,
ограниченные линейные или угловые перемещения
необходимость регулирования функции преобразования
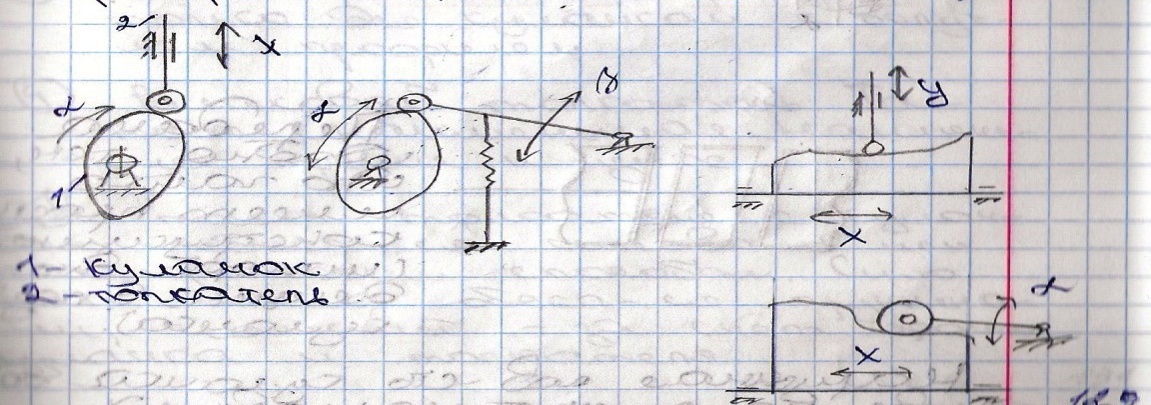
43. Кулачковый механизм.
Предназначен для преобразования вращательного или поступательного движения входного звена в поступательное или вращательное движение выходного звена.
Состоит из кулачка и толкателя.
Классификация:
По конструктивным признакам кулачковые механизмы делятся на:
Плоские (одна степень свободы);
Пространственные (две степени свободы).
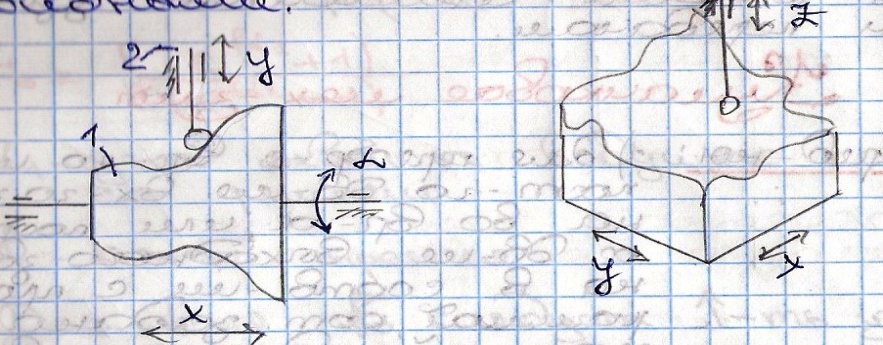
По расположению рабочей поверхности кулачки бывают:
Периферийные;
Торцовые.
В кулачковых механизмах используются толкатели различных форм:
1. Плюс: наиболее точный. Минус: большие контактные напряжения, большой износ, следовательно потеря точности.
Контактное напряжение ниже, но меньше точность (самый распространенный вариант).
Плоский толкатель. Пригоден только для кулачков с выпуклым профилем.
Роликовый толкатель. Точность наименьшая. Наименьшее трение и износ.
Контакт толкателя с кулачком обеспечивается силовым или геометрическим способом. Силовой обычно обеспечивается пружинами, а геометрический за счет формы кулачка и толкателя.