

Нормальне рівняння прямої знаходження відстані від точки до прямої.
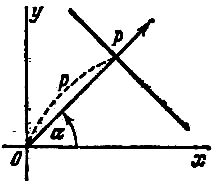
Пусть на плоскости хОу дана прямая. Проведем через начало координат перпендикуляр к данной прямой и назовем его нормалью. Обозначим через Р точку пересечения нормали с данной прямой и установим положительное направление нормали от точки О к точке Р.
Если ![]() -
полярный угол нормали, р - длина
отрезка
-
полярный угол нормали, р - длина
отрезка ![]() (рис.),
то уравнение данной прямой может быть
записано в виде
(рис.),
то уравнение данной прямой может быть
записано в виде
![]() ;
;
уравнение этого вида называется нормальным.
Пусть
дана какая-нибудь прямая и произвольная
точка ![]() ;
обозначим через d расстояние
от точки М* до данной прямой.
Отклонением
;
обозначим через d расстояние
от точки М* до данной прямой.
Отклонением ![]() точки
от
прямой называется число +d, если данная
точка и начало координат лежат по разные
стороны от данной прямой, и -d, если данная
точка и начало координат расположены
по одну сторону от данной прямой. (Для
точек, лежащих на самой прямой,
=0).
Если даны координаты
точки
от
прямой называется число +d, если данная
точка и начало координат лежат по разные
стороны от данной прямой, и -d, если данная
точка и начало координат расположены
по одну сторону от данной прямой. (Для
точек, лежащих на самой прямой,
=0).
Если даны координаты ![]() ,
, ![]() точки
и
нормальное уравнение прямой
,
то отклонение
точки
от
этой прямой может быть вычислено по
формуле
точки
и
нормальное уравнение прямой
,
то отклонение
точки
от
этой прямой может быть вычислено по
формуле
![]() .
.
Таким образом, чтобы найти отклонение какой-нибудь точки от данной прямой, нужно в левую часть нормального уравнения этой прямой вместо текущих координат подставить координаты точки . Полученное число будет равно искомому отклонению.
Чтобы
найти расстояние d от
точки до прямой, достаточно вычислить
отклонение и взять его модуль: ![]() .
.
Если
дано общее уравнение прямой ![]() ,
то, чтобы привести его к нормальному
виду, нужно все члены этого уравнения
умножить на нормирующий множитель
,
то, чтобы привести его к нормальному
виду, нужно все члены этого уравнения
умножить на нормирующий множитель ![]() ,
определяемый формулой
,
определяемый формулой
![]() .
.
Знак нормирующего множителя выбирается противоположным знаку свободного члена нормируемого уравнения.
Загальне рівняння площини вивід його, зміст коефіцієнтів.
Стандартное уравнение плоскости -
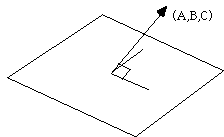
Ax + By + Cz + D = 0
Вектор (A, B, C) перпендикулярен плоскости.
Уравнение плоскости по трем точкам (x1,y1,z1), (x2,y2,z2), (x3,y3,z3) можно получить из следующих опрееделителей:
![]()
Раскрывая, получаем
A = y1 (z2 - z3) + y2 (z3 - z1) + y3 (z1 - z2)
B = z1 (x2 - x3) + z2 (x3 - x1) + z3 (x1 - x2)
C = x1 (y2 - y3) + x2 (y3 - y1) + x3 (y1 - y2)
- D = x1 (y2 z3 - y3 z2) + x2 (y3 z1 - y1 z3) + x3 (y1 z2 - y2 z1)
Следует заметить, что, если все точки лежат на одной прямой, то (A,B,C) будет (0,0,0).
Знак s = Ax + By + Cz + D определяет, с какой стороны по отношению к плоскости находится точка (x,y,z). Если s > 0, то точка лежит в той стороне, куда указывает нормальный вектор (A,B,C). Если s < 0 - на противаположной стороне, а в случае s = 0 точка принадлежит плоскости.
Рівняння площини що проходить через три точки, через точку та два вектора.
Уравнение
плоскости, проходящей через три заданные
точки
![]() ,
не лежащие на одной прямой:
,
не лежащие на одной прямой:
![]()
(смешанное произведение векторов), иначе

Уравнение
плоскости, проходящей через точку
![]() перпендикулярно вектору нормали
перпендикулярно вектору нормали
![]() :
:
![]()
в
векторной форме:
![]()
Рівняння площини в відрізках на осях, та нормальне рівняння площини.
Уравнение
плоскости в отрезках:
![]()
Где
![]() ,
,
![]() ,
,
![]() — отрезки, отсекаемые П. на осях
— отрезки, отсекаемые П. на осях
![]() и
и
![]() .
.
Нормальное (нормированное) уравнение плоскости
![]()
в векторной форме:
![]()
где
![]() -
единичный вектор,
-
единичный вектор,
![]() — расстояние П. от начала координат.
Уравнение (2) может быть получено из
уравнения (1) умножением на нормирующий
множитель
— расстояние П. от начала координат.
Уравнение (2) может быть получено из
уравнения (1) умножением на нормирующий
множитель
![]() (знаки
и противоположны).
(знаки
и противоположны).