

1)ВП - последовательность сменяющих друг друга состояний некоторой информационной среды.
Модель ВП – описание последовательной смены состояний определенной среды.
Теоретическая: математическая, схема(алгоритм)
Компьютерная программа
Виды ВП
Общий случай |
Частный случай |
параллельные |
последовательные |
с автопараллельностью |
без автопараллельности |
двумерные |
одномерные |
общего вида |
приведенные |
Методы организации управления ВП:
последовательное управление (ПУ)
последовательно-параллельное управление (ППУ)
асинхронное управление (АУ)
2) Проблема разрешимости
Тезис Тьюринга: функция F является (частично) вычислимой, если существует машина Тьюринга Т такая, что FT = F. Говорят также, что для функции F существует (частичный) алгоритм вычисления ее значений, задаваемый машиной Т.
Пусть V – алфавит, М ÍV – множество слов в V.
FM - Характеристическая функция
FM(а) = 1, если а ÎМ, и FM(а) = 0, в остальных случаях.
Множество М называется разрешимым, если его характеристическая функция вычислима.
Теорема (Тьюринг). Проблема остановки машины Тьюринга неразрешима.
3) АП
АП=<S, F, I, R>
S={“события, организующие процесс”}
FÍSxS
I ={“инициаторы”}; I ÍS
R={“результанты”}; R ÍS
Способы задания АП
Описание множеств списками
АП=<S,F>
S={s1, s2, s3, s4, s5, s6};
F={(s1,s3); (s1,s4); (s2,s1); (s3,s5); (s5,s1); (s4,s6)}
ИЛИ
Таблица функции следования
Матрица смежности ортграфа
Диаграмма ортграфа
Назначение инициаторов:
1) ("iÎ I) [$sÎ S: iFs].
2) ("iÎ I) [Ø($sÎ S\I): sFi].
Назначение результантов:
1) ("rÎ R) [$sÎ S: sFr].
2) ("rÎ R) [Ø($sÎ S\R): rFs].
Граф- Совокупность двух множеств: множества точек (вершин) V и множества линий (ребер)Е ÍVxV. Е={(vi,vj)| vi,vj ÎV}.
4) Эффективный ап, классы эквивалентности, управляемый ап.
Эффективный процесс
Определение: АП называется эффективным, если
1. из его инициаторов все траектории ведут в результанты
2. каждая из траекторий, приводящих к результанту, начинается в некотором инициаторе
3. процесс не содержит ориентированных циклов вне множества R результантов.
Эффективность АП оставляет место недетерминизма, т.е. возможно, что из одного инициатора процесс попадает в разные результанты.
Если I={s1, s5}, R={s4}, то не выполняется свойство 1;
если I={s7}, R={s1,s2, s3, s4, s5, s6}, то не выполняется свойство 2;
если I={s7, s8}, R={s4}, то не выполняется свойство 3;
если I={s7, s8}, R={s1, s2, s3, s4, s5, s6}, то асинхронный процесс эффективный.
 классы
ап эквивалентности: если есть инициатор
начальный, рез-тант заключительный.
Если есть ф. следования яв-ся взаимно
однозачн событ то процесс детерменирован
классы
ап эквивалентности: если есть инициатор
начальный, рез-тант заключительный.
Если есть ф. следования яв-ся взаимно
однозачн событ то процесс детерменирован
Управляемый процесс
Определение: Если в эффективном АП каждая допустимая последовательность классов ведёт из начального класса в один и только один заключительный класс, то такой процесс называется управляемым.
В управляемом процессе вводится ограничение на степень недетерминизма: для каждого инициатора, все траектории, из него исходящие ведут в один заключительный класс.
П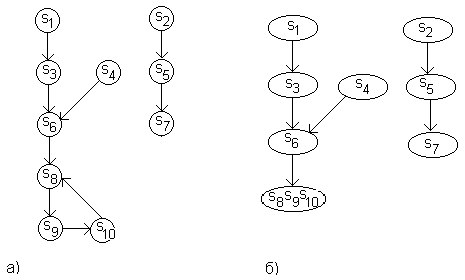 ример:
ример:
5) Простой ап, его протокол. Репозиция ап.
Простой процесс
Определение: Эффективный АП называется простым, если он удовлетворяет условиям:
" iÎ I i F s Þ sÏ I
" rÎ R s F r Þ sÏ R
Репозицией АП Р={S, F, I, R} называется эффективный асинхронный процесс P`={S`,F`,I`,R`}, где S`=I U R U Sд, I`Í R, R`Í I.

Если I`=R, R`=I, то репозиция называется полной, иначе частичной.
Протокол простого АП отношение QÍI*R на каждой траектории процесса один рез-тант и инициатор