

45.Частотные датчики.
Принцип действия частотных датчиков скорости вращения состоит в преобразовании скорости вращения в частоту. Выходной сигнал может быть представлен в виде последовательности коротких импульсов.
Частотные датчики можно разделить на: генераторные, модуляционные, оптические и емкостные. Индуктор (ротор) может быть выполнен в виде постоянного магнита, ферромагнитного стержня или шестеренки. Импульсы индукционных датчиков возникают из-за изменения магнитного сопротивления магнитному потоку.
У оптических (фото-импульсных) датчиков импульсы создаются с помощью дисков с отверстиями или прорезями. Диски перекрывают постоянный источник света. В основе работы емкостно-частотного датчика скорости вращения лежит изменение емкости между электродом и зубцом зубчатого колеса. Электрическое поле в зазоре создается генератором высокой частоты (1 ÷ 2) МГц. Выходной сигнал, проходящий через емкость между зубчатым колесом, становится импульсно-модулированным. Зубчатое колесо выполняется из любого проводящего материала. Зазор между зубцами колеса и электродом должен быть минимальным.
Преимущество частотных датчиков заключается в отсутствии погрешностей при преобразовании скорости вращения в частоту и передачи сигнала на большие расстояния, отсутствии нагрузки исследуемого вала, отсутствии запаздывания.
Преобразователи частотных сигналов, поступающих от индукционных, фотоэлектрических или емкостных датчиков, могут содержать следующие узлы: электронный усилитель для формирования сигнала с постоянной амплитудой, преобразователь частота – ток, (0 ÷ 5) мА, генератор опорной частоты и источник питания.
Электронный тахометр 7ТЭ предназначен для дистанционного измерения частоты вращения с индикацией результатов измерения на пятиразрядном цифровом индикаторе. Диапазон измерения скорости вращения от 2 до 90000 об/мин разбит на 11 поддиапазонов. Приведенная погрешность
0,02%, температура окружающей среды 10...60ºС.
Комплекс тахометрических преобразователей «Турбина» служит для измерения частоты вращения и преобразования ее в унифицированный сигнал ГСП (0-5) мА с относительной погрешностью 0,5%.
Для бесконтактного измерения частоты вращения в гироскопических устройствах и других приборах, где нельзя нагружать вращающиеся узлы, широко применяется стробоскопический метод.
Стробоскопический метод измерения скорости
На рис. 3.47. приведена структура стробоскопического метода [7].
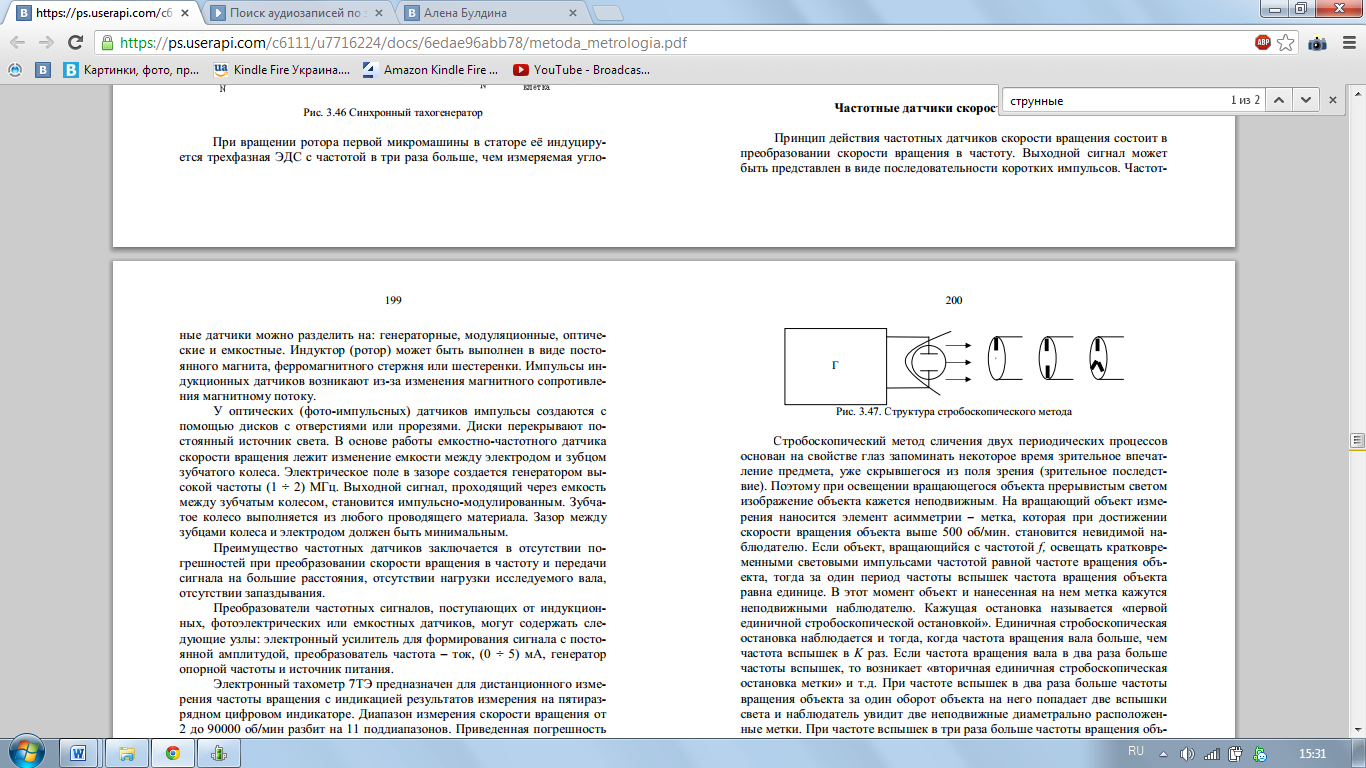
Стробоскопический метод сличения двух периодических процессов основан на свойстве глаз запоминать некоторое время зрительное впечатление предмета, уже скрывшегося из поля зрения (зрительное последствие). Поэтому при освещении вращающегося объекта прерывистым светом изображение объекта кажется неподвижным. На вращающий объект измерения наносится элемент асимметрии – метка, которая при достижении скорости вращения объекта выше 500 об/мин. становится невидимой наблюдателю. Если объект, вращающийся с частотой f, освещать кратковременными световыми импульсами частотой равной частоте вращения объекта, тогда за один период частоты вспышек частота вращения объекта равна единице. В этот момент объект и нанесенная на нем метка кажутся неподвижными наблюдателю. Кажущая остановка называется «первой единичной стробоскопической остановкой». Единичная стробоскопическая остановка наблюдается и тогда, когда частота вращения вала больше, чем частота вспышек в K раз. Если частота вращения вала в два раза больше частоты вспышек, то возникает «вторичная единичная стробоскопическая остановка метки» и т.д. При частоте вспышек в два раза больше частоты вращения объекта за один оборот объекта на него попадает две вспышки света и наблюдатель увидит две неподвижные диаметрально расположенные метки. При частоте вспышек в три раза больше частоты вращения объекта наблюдатель увидит три симметрично расположенные неподвижные метки и т.д. Если частота генератора немного отличается от частоты вращения, то метка будет плавно перемещаться по направления либо против направления вращения объекта. Измерение скорости вращения объекта надо начинать с максимальных значений частоты генератора и плавно снижая ее добиться «первой стробоскопической остановкой метки». Значение частоты вращения объекта снимается с индикатора частоты генератора.
Точность измерения стробоскопическим методом определяется стабильностью работы генератора (0,01%). Стробоскопический метод является образцовым для проверки вышеописанного частотного оборудования, а также для измерения частоты вращения режущего инструмента и частоты вибраций элементов оборудования.
46.Цифровые датчики