

38. Индукционные датчики перемещения. Вращающиеся трансформаторы, резольверы, индуктосины
Среди
многообразия бесконтактных датчиков,
по неприхотливости к внешним условиям,
простоте изготовления и долговечности
наиболее привлекательны индукционные
(или генераторные) датчики. На их основе
были созданы различные приборы - от
самых простых, регистрирующих линейные
перемещения, до сложных, таких как
системы зажигания с цифровым управлением,
системы впрыска топлива, антиблокировочные
системы управления тормозами и т.п.
Остановимся на процессе, проходящем в
генераторном датчике. В простейшем
случае датчик состоит из катушки с
обмоткой, сердечника из магнитомягкого
железа и магнита. Эти три компонента
составляют статор датчика. Со статором
взаимодействует ротор в виде зубчатого
диска или зубчатой рейки с количеством
зубцов, определяемым условиями применения
датчика (рис.1).
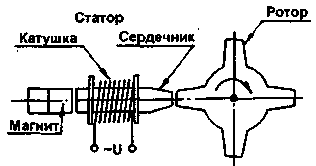
При вращении ротора, в обмотке статора возникает переменное напряжение. Когда один из зубцов ротора приближается к обмотке, напряжение в ней быстро возрастает и, при совпадении со средней линией обмотки, достигает максимума, затем, при удалении зуба, быстро меняет знак и увеличивается в противоположном направлении до максимума.
Величина напряжения, вырабатываемого датчиком, зависит от частоты вращения ротора, числа витков катушки и величины магнитного потока, создаваемого постоянным магнитом. Поскольку две последние величины постоянны, величина индуцируемого напряжения достигает максимума при максимальной частоте вращения. При конструировании следует уделять особое внимание усилению импульсов при малой частоте следования. Сфера применения подобных датчиков обширна, остановимся на некоторых примерах.
Вращающимися трансформаторами называют электрические микромашины переменного тока, предназначенные для преобразования угла поворота θ в напряжение, пропорциональное некоторым функциям угла (например, sin θ или cos θ) или самому углу поворота ротора.
Вращающиеся трансформаторы (ВТ) применяют в аналого-цифровых преобразователях «угол – амплитуда –код» и «угол – фаза – код» и в системах дистанционной передачи угла повышенной точности.
Возможны несколько режимов работы вращающихся трансформаторов в зависимости от схемы включения их обмоток:
1) синусно – косинусные ВТ, у которых выходное напряжение одной обмотки пропорционально синусу угла поворота ротора, а другой обмотки – косинусу угла поворота ротора (СКВТ);
2) линейные ВТ, у которых выходное напряжение пропорционально в ограниченном диапазоне углу поворота ротора (ЛВТ);
3) датчики и приемники трансформаторных дистанционных передач угла (ВТДП), выполняющие функции, аналогичные трансформаторным сельсинам;
Основным требованием, предъявляемым к вращающимся трансформаторам, является максимальная точность преобразования угла в напряжение по заданному функциональному закону. Большинство существующих ВТ рассчитано на номинальную частоту 400 Гц, но может работать в диапазоне частот до 4000 Гц.
Конструкция. Вращающиеся трансформаторы в основном являются двухполюсными машинами. Однако в аналого-цифровых преобразователях «угол – код» и системах дистанционной передачи угла повышенной точности применяют и многополюсные вращающиеся трансформаторы, которые будут рассмотрены далее.
В бесконтактных вращающихся трансформаторах напряжения с обмоток ротора можно снимать (подавать) с помощью переходных кольцевых трансформаторов. Длина бесконтактных вращающихся трансформаторов больше, чем контактных, в связи с необходимостью размещения переходных трансформаторов. Однако существенное повышение надежности окупает этот недостаток.
Конструкция вращающихся трансформаторов и технология их изготовления должны обеспечивать при повороте ротора изменение взаимоиндуктивности М между обмотками статора и ротора по закону, наиболее близкому к идеальной синусоиде. Допустимое отклонение от идеального закона во многих случаях не должно превышать 0,005 %.
Резольвер (resolver). Cинусно-косинусный вращающийся трансформатор, или сокращенно СКВТ. Датчик углового положения с четырьмя обмотками – двумя на статоре и двумя на роторе (возбуждения, квадратурная, синусная и косинустная). Величина поворота вала двигателя определяется по сдвигу синусной и косиноснуй составляющих напряжения. Термин резольвер прочно закрепился у поставщиков импортного оборудования и подрядчиков, занимающихся установкой этих устройств.
Индукционный редуктосин представляет собой бесконтактный синус-косинусный поворотный трансформатор. Первичная и две вторичные обмотки размещены на статоре. Ротор выполнен в виде зубчатого кольца из электротехнической стали.
Индуктосином называют бесконтактную информационную машину без магнитопровода с печатными первичной и вторичной обмотками, возбуждаемую однофазным напряжением. Выходное напряжение индуктосина является функцией углового положения ротора.
Конструктивно индуктосин представляет собой два диска (ротор и статор) из изоляционного материала (керамика, стекло). Один из дисков соединяется с валом, угловое положение которого подлежит изменению, второй неподвижен. На торцевых поверхностях, обращенных друг к другу, диски несут печатные обмотки.
Поворотные трансформаторы используются в следящих системах в качестве датчиков угла, в преобразователях "угол-код", в системах числового и программного управления металлорежущими станками.
39. Датчики перемещения. Сельсины. Схема подключения, основные соотношения. Структурная схема. Точность измерения.
Датчиком называется первичный элемент автоматической системы, реагирующий на изменение физической величины, характеризующей процесс, и преобразующий эту величину в другую, удобную для работы последующих элементов. Статической характеристикой датчика является зависимость изменения выходной величины от изменения входной.
Датчик перемещения с изменяющейся индуктивностью.
Наиболее широко для контроля размеров изделий, перемещений движущихся деталей, усилий, давлений, веса грузов и других физических величин используются индуктивные преобразователи.
Такое широкое распространение они получили благодаря своим достоинствам: большой выходной мощности, не требующей дальнейшего усиления сигнала, высокой чувствительности к измеряемой величине, широким пределам измерений, достаточной точности контроля, долговечности в работе, удобству в эксплуатации, простоте конструкции и схемных реализаций.
Однако наряду с отличными достоинствами индуктивные преобразователи обладают нелинейностью характеристики. Поэтому при разработке индуктивного измерительного преобразователя необходимо провести оптимизацию его конструкции, т.е. выбрать такие конструктивных и основных параметров преобразователя, которые бы позволили получить наилучшие метрологические характеристики.
Очень часто в практических целях возникает необходимость осуществлять допусковый контроль размеров изделий, т.е. не самих размеров, а отклонений их от номинальных параметров. Поэтому определенный интерес представляет выяснение протяженности линейного участка характеристики индуктивного преобразователя вблизи заданной ее рабочей точки.
Датчик перемещения с изменяющейся индуктивностью предназначен для преобразования линейного перемещения в изменение индуктивности его обмоток.
Датчик перемещения с изменяющейся индуктивностью, во время работы должен быть устойчивым и прочным к воздействию однократных и многократных механических ударов.
Данные датчики должны сохранять свои характеристики при воздействии постоянных магнитных полей сетевой частоты с напряженностью до 400А/м.
Эксплутационные требования:
Безопасность эксплуатации датчика перемещения с изменяющейся индуктивностью должна обеспечиваться
1)прочностью установленной в стандартах,
2)изоляцией электрических цепей,
3)надежным креплением при монтаже на объекте.
Структурная схема: Для получения выходного сигнала, индуктивный датчик должен быть включен в электрическую схему.

Основные датчика в автоматизированном оборудовании можно разделить на следующие группы: 1) датчики положения: а) датчики линейного перемещения, б) датчики фиксированных положений; 2) датчики скорости; 3) датчики температуры (окружающей среды, рабочей жидкости и др.); 4) датчики усилия (например, усилия резания по цифровому датчику давления).
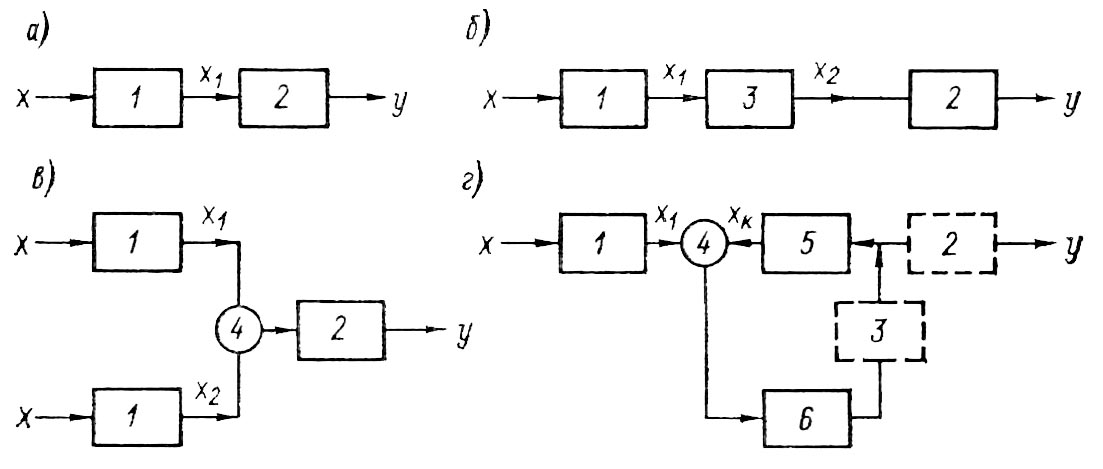
Рис. 0. Структурные схемы датчиков: а – двухзвенного; б – со схемой каскадного соединения; в – с дифференциальной схемой; г – с компенсационной схемой; Рис. 0. Структурные схемы датчиков: а – двухзвенного; б – со схемой каскадного соединения; в – с дифференциальной схемой; г – с компенсационной схемой;
Сельсины
Сельсином называется информационная электрическая машина переменного тока, вырабатывающая напряжения, амплитуды и фазы которых определяются угловым положением ротора. Сельсины позволяют осуществить без общего механического вала согласованное вращение или поворот механизмов. Известны два режима работы сельсинов: индикаторный и трансформаторный. При работе сельсинов в индикаторном режиме происходит передача на расстояние угла поворота механической системы. При работе сельсинов в трансформаторном режиме передается сигнал, воздействующий на исполнительный механизм таким образом, чтобы заставить его отработать заданный поворот.
Рассмотрим устройство и принцип действия однофазных двухполюсных контактных сельсинов. Однофазная обмотка возбуждения, включенная в сеть переменного тока, расположена на явнополюсном статоре. На роторе размещены три пространственно смещенные относительно друг друга под углом 120o катушки синхронизации. Концы катушек соединены в общий узел, начала катушек выведены на контактные кольца. Обмотка возбуждения создает пульсирующий магнитный поток. Этот поток индуктирует трансформаторные ЭДС в катушках синхронизации. Наибольшая ЭДС индуктируется в катушке, ось которой совпадает с осью пульсирующего потока. При отклонении оси катушки ЭДС уменьшается по синусоидальному закону. Величина и фаза ЭДС в каждой катушке зависит от угла поворота ротора сельсина.
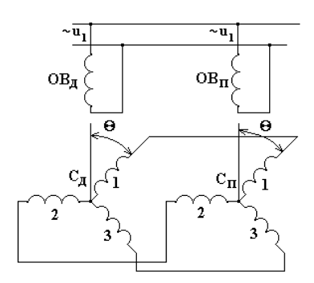
На рис.1 приведена схема соединения однофазных сельсинов при индикаторном режиме работы.
В схеме используются сельсин - датчик и сельсин - приемник, представляющие собой два совершенно одинаковых сельсина. ОВд и ОВп - обмотки возбуждения сельсина - датчика и сельсина - приемника. Сд и Сп - катушки синхронизации.