

5.Типовая структура сау.
Система автоматического управления (рис 1.1) содержит: устройство управления (УУ) илирегулятор, на вход которого подается задающее воздействие (входной сигнал или совокупность сигналов) хвх(t). Задающее воздействие определяет требуемый закон управления. В результате этого воздействия на выходе регулятора вырабатывает управляющее воздействие U(t), которое поступает на вход объекта управления (ОУ).
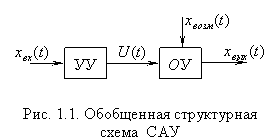
Под ОУ в данном курсе понимается любое техническое устройство (станок, самолет, турбина и т.д.), для функционирования которого необходимы специально организованные воздействия U(t). Качество управления оценивается по значению выходной величины объекта хвых(t) – это обычно главный технологический параметр (скорость, мощность, производительность и т.д.).
Наряду с хвх(t), внешним по отношению к рассматриваемой САУ явяляются возмущающее воздействие хвозм(t), которое, как и U(t), приложено к ОУ. К числу таких возмущений можно отнести момент сопротивления при металлообработке, колебание напряжения в сети, ветровую нагрузку и т.д. Возмущающие воздействия искажают требуемый закон управления. Очевидно, что в первом приближении задача синтеза САУ состоит в разработке такого УУ, с которым и при наличии существенных возмущающих воздействий отклонение требуемого закона управления ОУ от фактического не превышает допустимых значений.
 типовая
схема САУ
типовая
схема САУ
6.Математическое описание сау. Дифференциальные уравнения.
Исследов-е сис.АУ связано с исслед-е проц-в протек-х в эл-ах сис-ы. Дан.проц-ы м/б опис-ы линей-и ДУ с пост.коэф-и,нелин-и,интегр-ми ур-ми,разностными,алгебр-ми и тд. Эл-ы САУ связаны м/у собой зная описание кажд-о эл-а м-о состав-ь мат-ое опис-е всей сис-ы управ-я. Пусть сис.сост.из регулятора и объекта
![]() Вх-е
воздей-я в эл-х явл.непрер-и ф-ми вр-и
дифиринцир-е конеч-е число раз. ОУ опис.
ур-м: х=[U,U’,..U(m),f,f’,..f(k),x’,..x(n)]
Управляющ.воздей-е на ОУ явл.вых-м сиг-м
регулятора ур-е к-го. Р: U=F[E,E’..E(m),U’..U(m)],
где E(t)=g(t)-x(t).
Дан-й сис-ы ур-й достаточно д/опис-я
проц-в происх-х во всей сис-е.
х=[g,g’,..g(m),f,f’,..f(k),x’,..x(n)]
получ-е ур.наз.ур-ем динамики. В
установившемся режиме сис.опис-ся
x0=U[g0,f0]
Если в проц.сис.опис.нелин.ур.его
стараются заменить эквивал-м лин.ур.,такая
замена наз.линеоризацией, в зависимости
от вида нелин-ти
2 типа линеоризации: если нелин-ть
опис-ся аналитич-м ур.,то исполь-т
статич-ую линеор-ю проводят разложение
ф-и
в ряд Тейлора в окрест-ти т. Х0.
Если нелин-ь существенная,то исполь-т
гармонич-ую линеор-ю к-я ося
разлож-м ф-и в ряд Фурье.
Вх-е
воздей-я в эл-х явл.непрер-и ф-ми вр-и
дифиринцир-е конеч-е число раз. ОУ опис.
ур-м: х=[U,U’,..U(m),f,f’,..f(k),x’,..x(n)]
Управляющ.воздей-е на ОУ явл.вых-м сиг-м
регулятора ур-е к-го. Р: U=F[E,E’..E(m),U’..U(m)],
где E(t)=g(t)-x(t).
Дан-й сис-ы ур-й достаточно д/опис-я
проц-в происх-х во всей сис-е.
х=[g,g’,..g(m),f,f’,..f(k),x’,..x(n)]
получ-е ур.наз.ур-ем динамики. В
установившемся режиме сис.опис-ся
x0=U[g0,f0]
Если в проц.сис.опис.нелин.ур.его
стараются заменить эквивал-м лин.ур.,такая
замена наз.линеоризацией, в зависимости
от вида нелин-ти
2 типа линеоризации: если нелин-ть
опис-ся аналитич-м ур.,то исполь-т
статич-ую линеор-ю проводят разложение
ф-и
в ряд Тейлора в окрест-ти т. Х0.
Если нелин-ь существенная,то исполь-т
гармонич-ую линеор-ю к-я ося
разлож-м ф-и в ряд Фурье.
7.Математическое описание сау. Преобразование Лапласа. Понятие передаточной функции системы.
лин.сис.АУ
м/б описана диф.ур.общего вида![]()
аn +..+a1
+..+a1 +a0x(t)=bm
+a0x(t)=bm +b1
+b1 +b0g(t)+Ck
+b0g(t)+Ck +..+C1
+..+C1 +C0f(t)
(0) Д/удобства исслед-я САУ ДУ преобраз-т
при помощи преобразов-я Лапласа при
этом оператор (
+C0f(t)
(0) Д/удобства исслед-я САУ ДУ преобраз-т
при помощи преобразов-я Лапласа при
этом оператор ( )
диф-я заменяют опер-ом Лапласа P(S)
=
P(S)
(P
или S)
Сиг-лы вх.и вых.замен-т их изоб-ми
)
диф-я заменяют опер-ом Лапласа P(S)
=
P(S)
(P
или S)
Сиг-лы вх.и вых.замен-т их изоб-ми
 ,
, ,
, .
Изоб-е сиг-ов X(t)=X(P).
В соотв-ии с преобр-е Лапласа лин.ур.(0)
примет вид:
anpnx(p)+...+a1px(p)+a0x(p)=bmpmG(p)+..+b1pG(p)+b0G(p)+GkpkF(p)+..+C1pF(p)+C0F(p).
Передаточной ф-ей наз-т отношение
изобр-я вых-й вел-ы к изоб-ю вх-й вел-ы.
В
сис.кол-во передаточ-й ф-и зависит от
кол-а вх-х возде-й
.
Изоб-е сиг-ов X(t)=X(P).
В соотв-ии с преобр-е Лапласа лин.ур.(0)
примет вид:
anpnx(p)+...+a1px(p)+a0x(p)=bmpmG(p)+..+b1pG(p)+b0G(p)+GkpkF(p)+..+C1pF(p)+C0F(p).
Передаточной ф-ей наз-т отношение
изобр-я вых-й вел-ы к изоб-ю вх-й вел-ы.
В
сис.кол-во передаточ-й ф-и зависит от
кол-а вх-х возде-й
 -переда-я
ф-я по управ-у возде-ю.
-переда-я
ф-я по управ-у возде-ю. -пере-я
ф.по возмущ-у возд-ю.
-пере-я
ф.по возмущ-у возд-ю. -(1)
знам-ль наз.харак-им ур-ем сис-ы.
-(1)
знам-ль наз.харак-им ур-ем сис-ы. .
.
 –
интеграл Лапласа.
–
интеграл Лапласа.
Перед.ф.сис.по управляющ.и возмущающ.воздействию
При исслед.САУ на устойчивость,качество исп.передат.ф-и 3 типов: 1.перед.ф.разомкн.сис.2. перед.ф. замкн.сис.3. перед.ф.ошибки
![]() 1.G(P)-управляющ.возд.2.F(P)-возмущ.возд.3.X(P)-вых.сигнал.
1. G(P)
1.G(P)-управляющ.возд.2.F(P)-возмущ.возд.3.X(P)-вых.сигнал.
1. G(P) 0,
F(P)=0
Wдр.с.
(P)=W1W2
(разомкн.сис.отс.главн.обр.связи) Wзз.с.
(P)=W1W2/(1+
W1W2)
WдЕ(P)=1/(1+
W1W2)
2. G(P)=0
F(P)
0
Wfр.с.
(P)=
W2,
Wfз.с.
(P)=W2/(1+
W1W2)
WfE
(P)=-W2/(1+
W1W2)
0,
F(P)=0
Wдр.с.
(P)=W1W2
(разомкн.сис.отс.главн.обр.связи) Wзз.с.
(P)=W1W2/(1+
W1W2)
WдЕ(P)=1/(1+
W1W2)
2. G(P)=0
F(P)
0
Wfр.с.
(P)=
W2,
Wfз.с.
(P)=W2/(1+
W1W2)
WfE
(P)=-W2/(1+
W1W2)