

Системы автоматический стабилизации
в процессе работы такой системы управляющее воздействие остается величиной постоянной. Основной задачей данной системы является поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующий возмущений, которые вызывают отклонение регулируемой величины от заданной ей значения. Отклонением регулируемой величины называют разность между значением регулируемой величины в данный момент времени и её значением принятым за начало отсчета. Понятие отклонения регулируемой величины является характерным для систем автоматической стабилизации и позволяет дать качественную оценку динамическим свойствам систем этого класса.
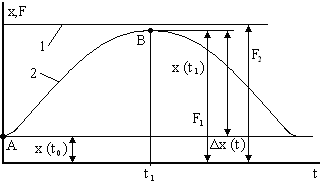
Пусть в некоторый момент времени t0 возмущающее воздействие f(t) скачком изменилась от значения F1до значения F2. И приняло постоянную характеристику (прямая 1). Это изменение вызовет изменение регулируемой величины x(t1) по кривой 2 от заданного значения x(t0). Тогда в соответствии с определением отклонение регулируемой величины в момент времени t1 будет величина Δх.
Δx(t) = x(t1) – x(t0).
Системами автоматической стабилизации является различного рода САР, предназначенные для регулирования скорости, напряжения, температуры, давления.
Системы программного регулирования
В этих системах управляющие воздействие изменяется по заранее установленному закону в функции времени или координат системы. Эта система является системой воспроизведения, в которой основной задачей является по возможности более точное воспроизведение управляющего воздействия на выходе в виде соответствующих изменений регулированной величины. От точности воспроизведения управляющего воздействия на выходе судят о величине ошибки, которая определяется как разность между величиной управляющего воздействия и регулированной величиной в момент времени t.
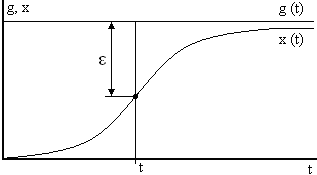
ε = g (t) – x(t)
g(t) – управляющее воздействие
x(t) – регулируемая величина
ε – ошибка
Следящие системы
В следящих системах управляющее воздействие является величиной переменной, но математическое описание управляющего воздействия во времени не может быть установлено, т.к. источником сигнала служит внешнее явление, закон изменения которого заранее не известен. Следящие системы предназначены для воспроизведения на выходе управляющего воздействия с той характеристике по которой можно судить о динамических свойствах следящей системы. Ошибка в следящей системе является сигналом, в зависимости от величины которого осуществляется управление исполнительными механизмами системы.
Система автоматического регулирования и управления представляет собой комплекс, состоящий из регулирующего объекта и регулятора. По характеру используемых элементов и функций, которые они выполняют системы автоматической стабилизации, следящие системы и системы программного управления принципиальных различий не имеют. В соответствии с принципом действия системы автоматического регулирования можно выделить основные элементы как правило присутствующие во всех трех классах систем. Во всех трех классах систем управляющее воздействие сравнивается с регулируемой величиной. Для выполнения этой операции применяют устройства, которые называются элементами сравнения.