5 Логические системы управления электроприводом
Для построения надежной системы управления электроприводом необходимо предусмотреть все возможные варианты реакций привода на внешние параметры и внутренние состояния. В некоторых случаях неправильная реакция привода на внешний сигнал может повлечь за собой смерти человеческих жизней.
Схемы построенные на базе конечных автоматов (КА) имеют конечное значение внутренних состояний, а также количество входов и выходов.
Синтез КА имеет ряд нюансов:
При числе внутренних состояний больше семи-восьми и примерно таком же количестве входов, есть смысл разбить конечный автомат на несколько конечных автоматов;
Имеет смысл также создавать конечный автомат для каждого устройства с приводом;
Необходимо правильно выбрать внутренние состояния, а также управляющие воздействия, сигналы обратных связей и т.д.
5.1 Синтез структурной схемы конечного автомата логической системы управления реверсивным электроприводом

Рисунок 18 – Насосный агрегат:
Р – насос; r1,...,r4 – переменные обратной связи; V – вентиль; u1,...,u3 – управляющие переменные; M1, M2 – приводные двигатели; Q1 – главная защита привода насоса; Q2, Q3 – защита закрытия и открытия вентиля; В1 – устройство контроля циркуляции; В2 – манометрический выключатель; S1, S2 – конечные выключатели открытия и закрытия вентиля.
Описание режимов работы
Приведена последовательность операций, которые должны быть выполнены при наладке насосного агрегата. Данный процесс словесно может быть описан следующим образом.
Приводной двигатель M1 насоса Р может быть включен только тогда, когда вентиль V напорного трубопровода закрыт.
Поэтому проверяют, закрыт ли этот вентиль, и при необходимости закрывают его. Если вентиль невозможно закрыть, то существует неисправность, для которой необходимо предусмотреть сигнализацию.
После включения двигателя насоса перед вентилем V создается давление р, которое при нормальной работе установки через определенное время t2 должно достичь значения P0. Если это не произошло, то либо насос не включился, либо в магистрали насоса отсутствует носитель.
С помощью датчика В1, контролирующего циркуляцию, можно установить причину повреждения. Если по истечении времени t2 давление р перед вентилем превысило значение P0, то подается команда «Открыть вентиль». Если через промежуток времени t1 вентиль открылся, то насос работает правильно, в противном случае имеет место неисправность вентиля V. Тогда двигатель M1 снова отключается, и подается сигнал о неисправности.
Синтез КА
КА управления задвижкой V
Задача КА:
При подаче на вход открытия открыть задвижку, контролировать время открытия. Если время открытия превысит максимально допустимое – система воспримет это, как заклинивание задвижки. При работе на закрытие или открытие задвижки, реверс задвижки невозможен. Открытие или закрытие констатируется тем, что приходит в течении допустимого времени сигнал с соответствующего конечника. Невозможность мгновенного переключения с открытия на закрытие, необходимо обеспечить время останова. Обеспечить защиту от заклинивания одновременно двух конечников положения задвижки.
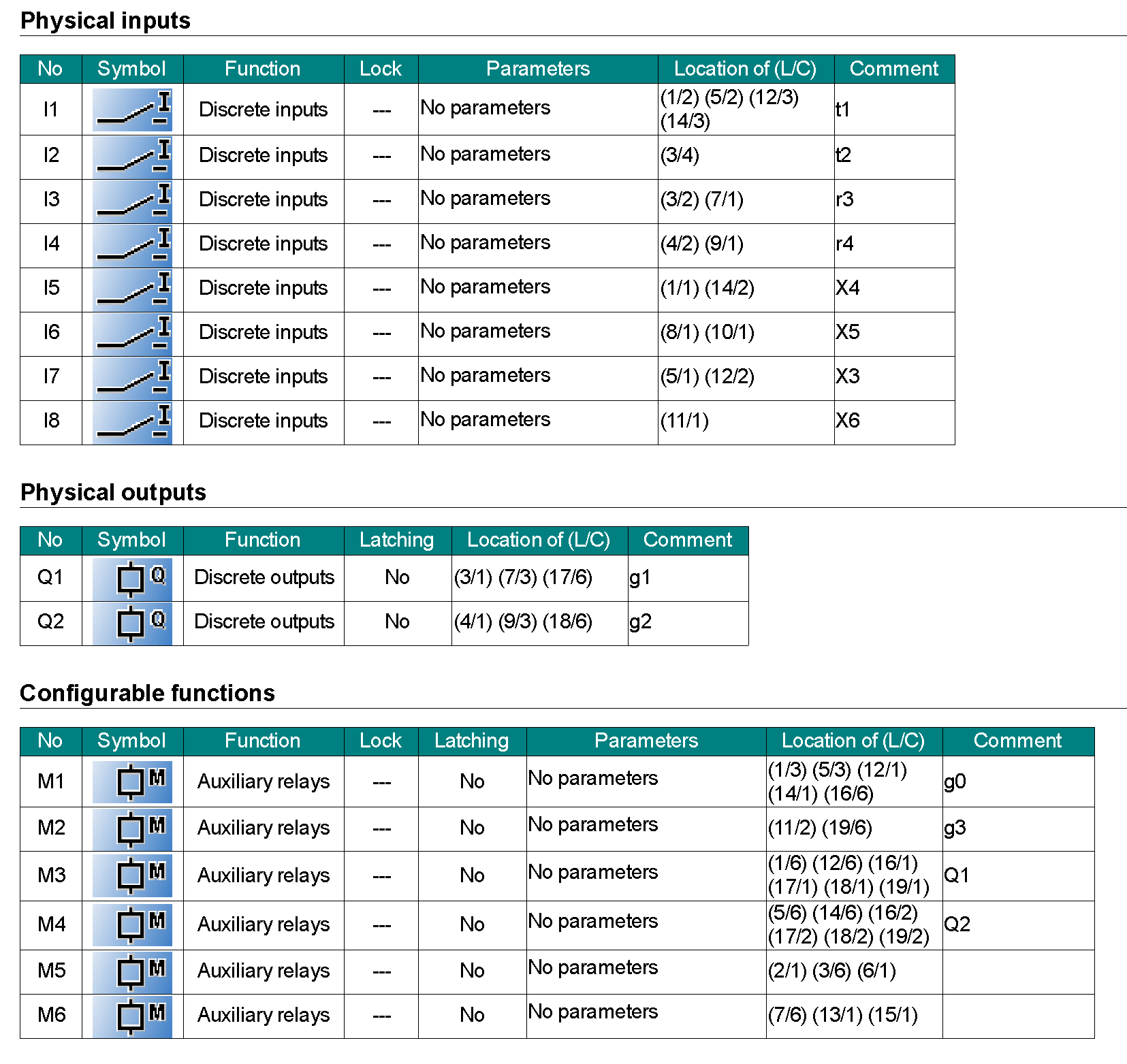
Входные данные:
Х3 – открыть задвижку;
Х4 – закрыть задвижку;
Х5 – стоп;
Х6 – сервисный сигнал (сигнал возврата из положения «Ошибка»);
Внутренние состояния:
Q1 – стоп;
Q2 – открытие;
Q3 – закрытие;
Q4 – ошибка.
Обратные связи:
r3 – открыта;
r4 – закрыта.
Диаграмма переходов приведена на рисунке 19.
Рисунок 19 – Диаграмма переходов КА
Таблица 5 – Таблица переходов КА
|
Q1 |
Q2 |
Q3 |
Q4 |
X3·t1 |
2 |
2 |
3 |
4 |
X4·t1 |
3 |
2 |
3 |
4 |
r3 |
1 |
1 |
3 |
4 |
r4 |
1 |
2 |
1 |
4 |
X6 |
1 |
1 |
1 |
1 |
r3·t2 |
4 |
4 |
4 |
4 |
r4·t2 |
4 |
4 |
4 |
4 |
r3·r4 |
4 |
4 |
4 |
4 |
Обозначим внутренние состояния объекта через g
X={X1,X2,X3,X4,X5}
Q={g0, g1, g2, g3}
Y={![]() }
}
Функции переходов автомата:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Таблица 6 – Таблица представления
внутренних состояний автомата
|
Q0 |
Q1 |
|
0 |
0 |
|
0 |
1 |
|
1 |
0 |
|
1 |
1 |
На основе таблицы 6 запишем выходную часть КА
![]()
![]()
![]()
![]()
Определяем комбинации сигналов подаваемых на триггеры
Таблица 7 – Комбинации сигналов подаваемых на триггеры
|
Q0 |
Q1 |
||
S0 |
R0 |
S1 |
R1 |
|
|
0 |
1 |
0 |
1 |
|
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
1 |
|
1 |
0 |
1 |
0 |
Исходя из таблицы 7 и в соответствии с функциями переходов запишем выражения для единичных значений сигналов.
![]()
![]()
![]()
![]()
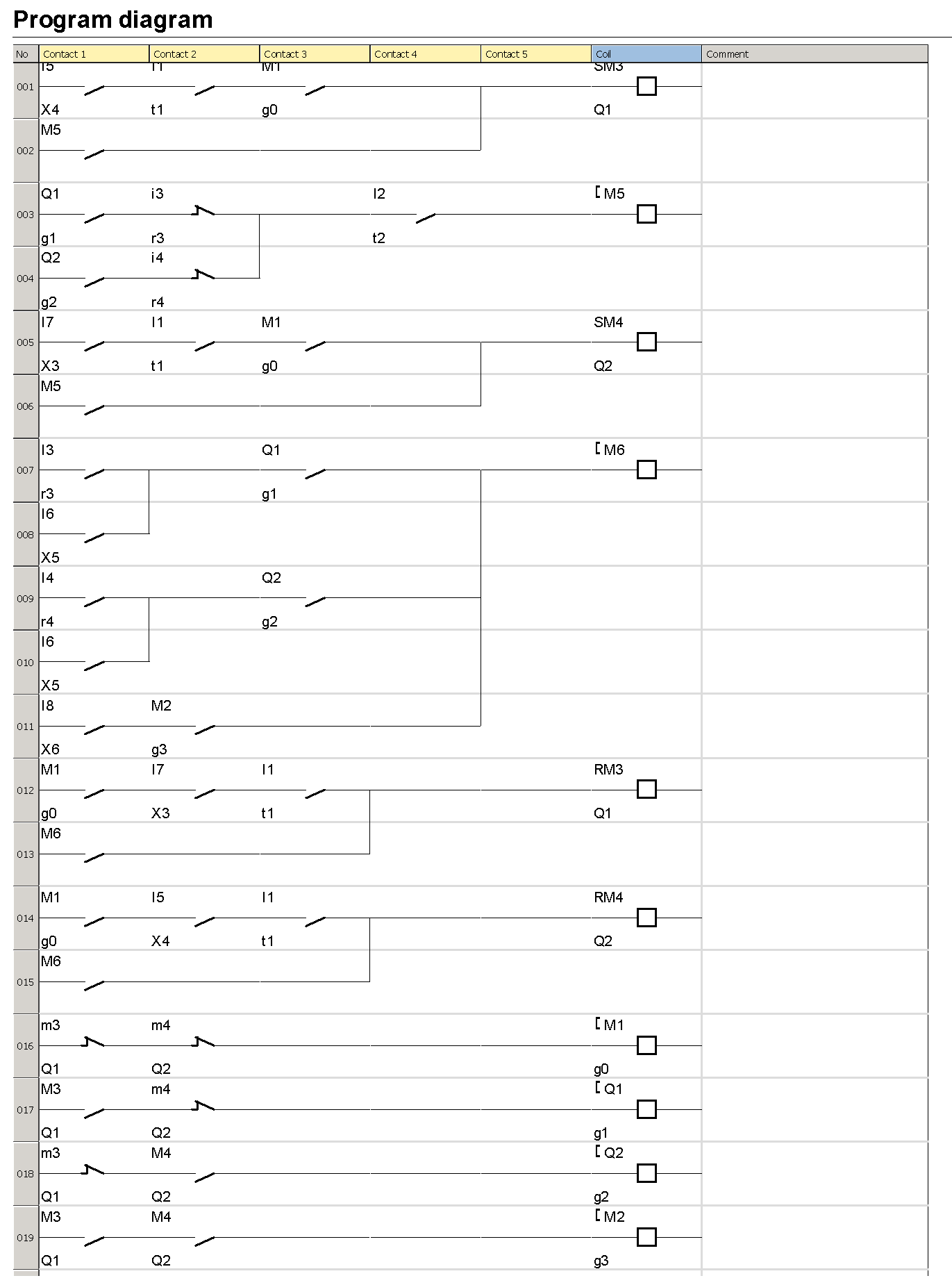
Полная структурная схема автомата приведена на рисунке 20. На схеме приведён КА задвижки V.




Рисунок 20 – Полная структурная схема конечного автомата V
Выходы КА подключены к симулятору задвижки, который представляет из себя звено задержки по времени.
Программа для конечного автомата в программе Zelio Soft