

3 Системы векторного управления
3.1 Синтез и анализ системы векторного управления с ориентацией по потокосцеплению ротора
Таблица 4 – Исходные данные
-
Параметр
Значение
Ед. изм.
Номинальная частота вращения ротора
152,9
с-1
Номинальный момент Мн
354,87
Н·м
Пусковой момент Мп
887,18
Н·м
Критический момент Мкр
1171,08
Н·м
Номинальный ток статора Iн
198,18
А
Критическое скольжение sкр
0,09293
Сопротивление
0,02257
0,248
Ом
0,01571
0,176
Ом
0,07035
0,418
Ом
0,09715
0,577
Ом
Сопротивление взаимоиндукции Xm
5,728
Ом
Полная индуктивность
статора LS
0,01846
Гн
ротора LR
0,01854
Гн
Взаимная индуктивность статора и ротора приведенная к статору Lm
0,01823
Гн
Коэффициент магнитной связи
статора kS
0,9879
ротора kR
0,9833
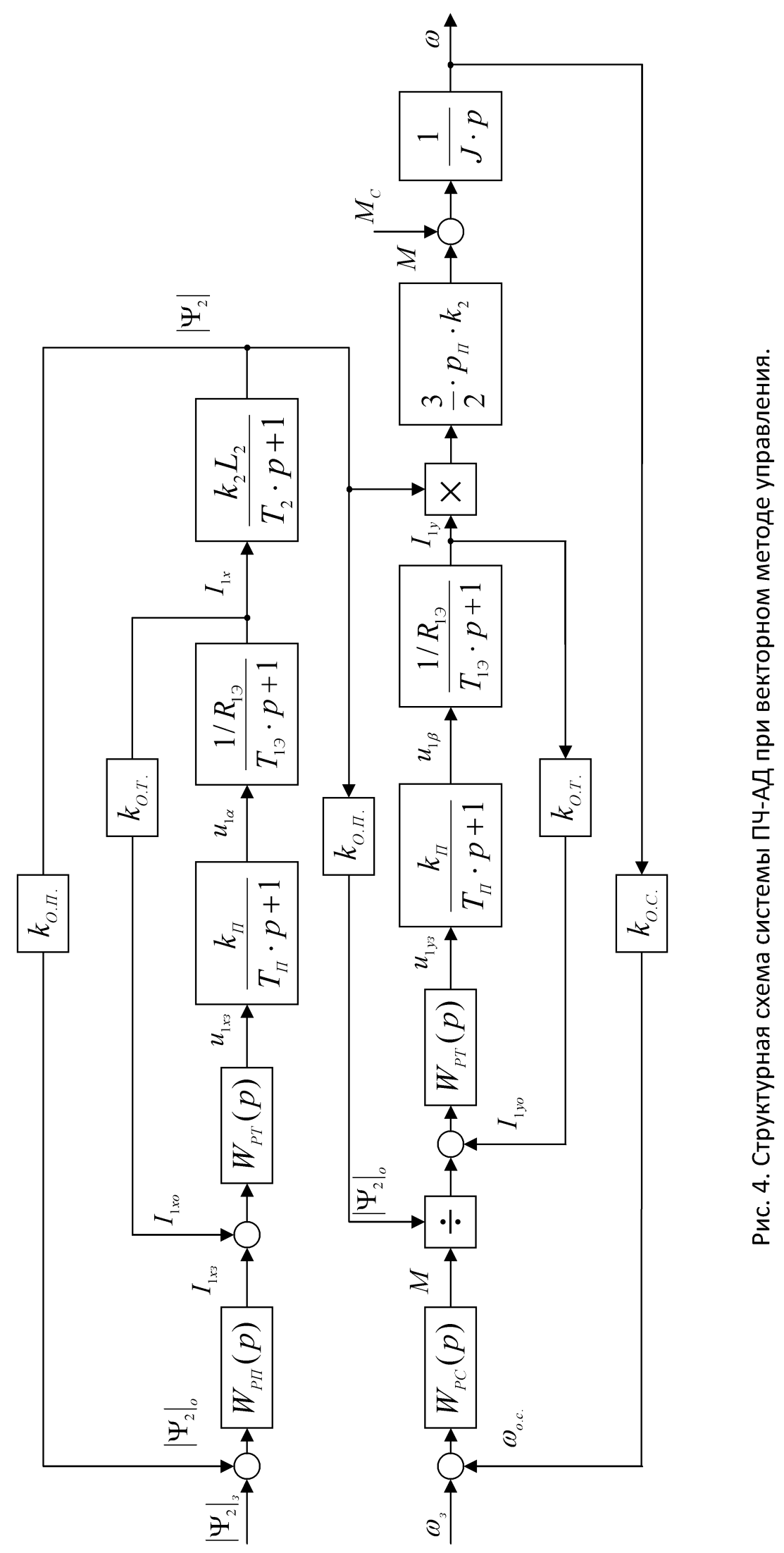
Структурная схема векторной системы управления с ориентацией по потокосцеплению ротора двигателя изображена на рисунке 16. За основу данной структурной схемы использована структурная схема из [3, c. 218] изменения были произведены в соответствии с рекомендациями изложенными в [5].

Синтез регуляторов системы управления
Синтез регулятора тока
Запишем передаточную функцию разомкнутого контура стабилизации тока:
![]()
где
![]() - суммарное активное сопротивление фазы
двигателя.
- суммарное активное сопротивление фазы
двигателя.
![]()
Желаемая передаточная функция разомкнутого контура стабилизации тока:
![]()
Принимаем
![]() соответствии
с настройкой регулятора на МО,
соответствии
с настройкой регулятора на МО,
![]() .
.
Вычислим передаточную функцию регулятора:
![]()
Обозначим:
![]()
Тогда выражение примет вид:
![]()
Синтез регулятора потока
Запишем передаточную функцию разомкнутого контура стабилизации потока:
![]()
Передаточная функция замкнутого контура регулирования потока:
![]()
Желаемая передаточная функция разомкнутого контура стабилизации потока:
![]()
Принимаем
![]() в соответствии
с настройкой регулятора на МО, а не
скомпенсированную постоянную времени
принимаем
в соответствии
с настройкой регулятора на МО, а не
скомпенсированную постоянную времени
принимаем
![]() .
.
Вычислим передаточную функцию регулятора:
![]()
Обозначим:
![]()
Тогда выражение примет вид:
![]()
Синтез регулятора скорости
Запишем передаточную функцию разомкнутого контура стабилизации скорости:
![]()
Передаточная функция замкнутого контура регулирования потока:
Желаемая передаточная функция разомкнутого контура стабилизации потока:
![]()
Принимаем
![]() соответствии
с настройкой регулятора на МО, а не
скомпенсированную постоянную времени
соответствии
с настройкой регулятора на МО, а не
скомпенсированную постоянную времени
![]() .
.
Вычислим передаточную функцию регулятора:
![]()
![]()
Расчет коэффициентов структурной схемы в абсолютных единицах
Основная задача в расчете коэффициентов структурной схемы заключается в том, чтобы определить максимальные проекции токов на оси х и у.
Методика определения проекций на оси х и у:

![]()
Длина вектора потокосцепления ротора:
![]()
Коэффициент обратной связи по потоку:
![]()
Коэффициент обратной связи по току:
![]()
Коэффициент обратной связи по скорости:
![]()
Коэффициент передачи преобразователя по напряжению и постоянная времени:
![]()
Расчет регуляторов
Регулятор тока:
![]()
![]()
![]()
![]()
Регулятор потока:
![]()
![]()
![]()
Регулятор скорости:
![]()
В канале управления потоком при синтезе регулятора тока принимаем длину проекции базисного тока на ось х равной проекции на ось у. В таком случае сигнал в модели по каналу потока необходимо ограничить до уровня, при котором проекция тока на ось х достигает своего максимального значения.
Найдем необходимое напряжение ограничения сигнала из пропорции:
![]()
![]()

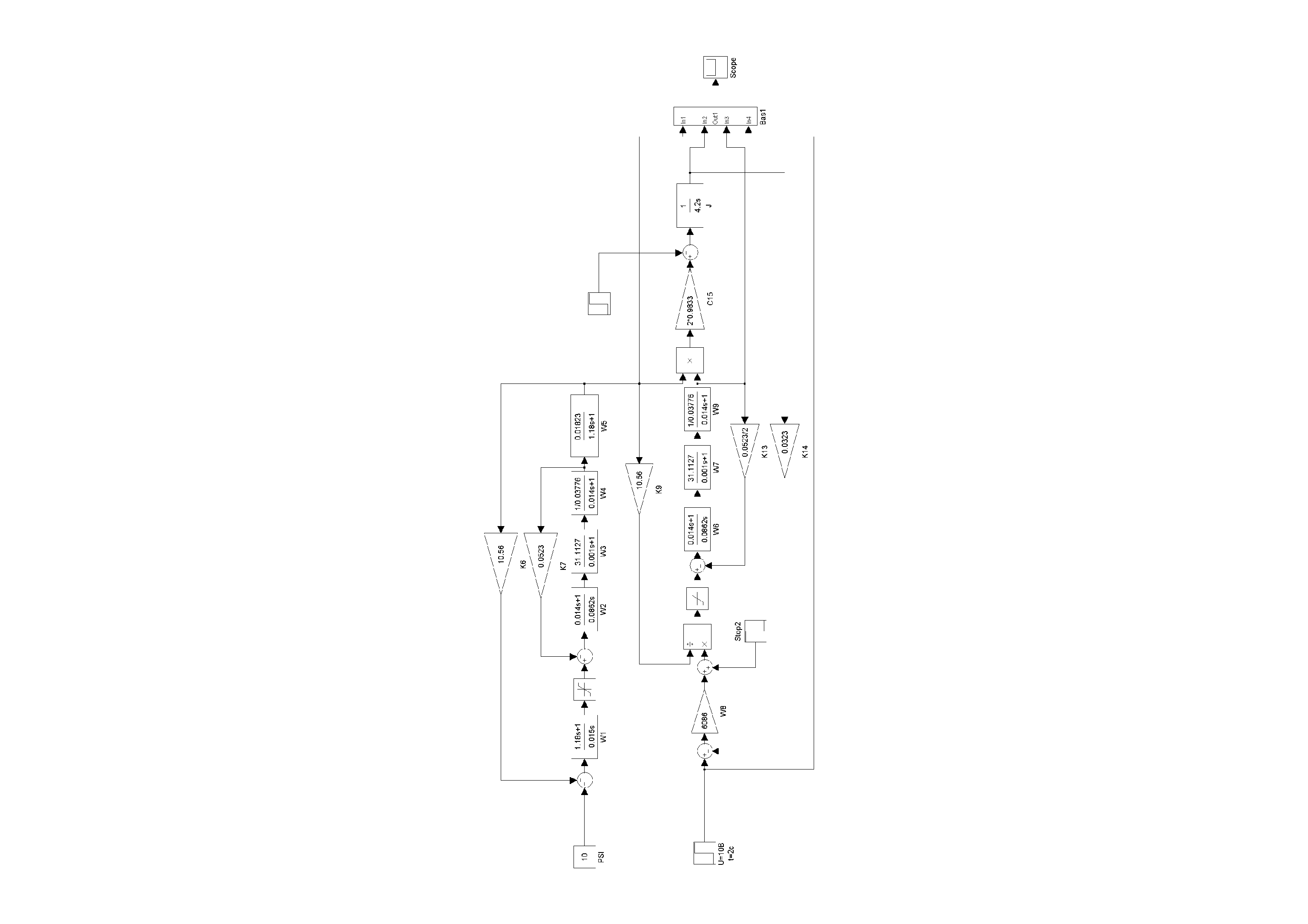
В результате моделирования получили следующие результаты.
Потокосцепление
Ток статора
Угловая частота
вращения ротора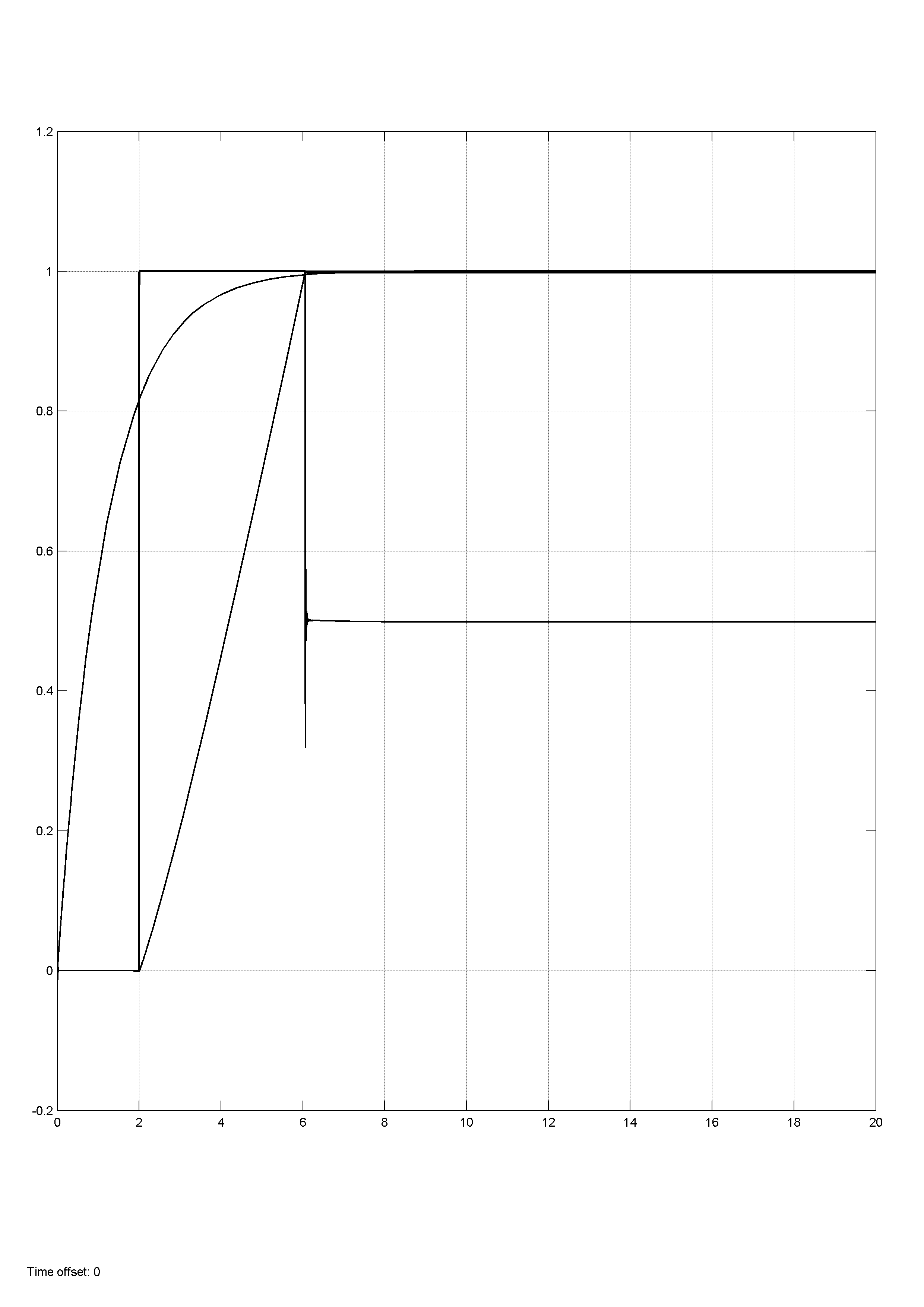
Рисунок 18 – График переходных процессов при пуске
Анализируя полученные результаты (см. рисунок 18) полученные при моделировании делаем выводы:
Векторная система управления позволяет почти полностью исключить опасные броски тока и момента;
Перед пуском необходима пауза для возбуждения машины;
Позволяет управлять моментом двигателя;