

Содержание
1 |
Математическое описание электродвигателя |
4 |
|
|
1.1 |
Расчет параметров математической модели электродвигателя |
4 |
|
1.2 |
Построение графиков переходных процессов и электромеханической характеристики двигателя |
7 |
|
1.3 |
Расчет параметров модели двигателя и построение графиков переходных процессов при регулировании частоты вращения изменением напряжения на обмотке статора |
10 |
|
1.4 |
Расчет параметров модели двигателя и построение графиков переходных процессов при регулировании частоты вращения изменением частоты питающего напряжения |
12 |
2 |
Системы скалярного управления |
14 |
|
|
2.1 |
Синтез и анализ замкнутой по скорости системы скалярного управления |
14 |
3 |
Системы векторного управления |
20 |
|
|
3.1 |
Синтез и анализ системы векторного управления с ориентацией по потокосцеплению ротора |
20 |
4 |
Промышленные преобразователи частоты |
29 |
|
|
4.1 |
Выбор преобразователя частоты для заданного двигателя со скалярным управлением |
30 |
|
4.2 |
выбор преобразователя частоты для заданного двигателя с векторным управлением |
32 |
5 |
Логические системы управления электроприводом |
35 |
|
|
5.1 |
Синтез структурной схемы конечного автомата логической системы управления реверсивным электроприводом |
36 |
|
5.2 |
Программирование конечного автомата |
42 |
Заключение |
44 |
||
Литература |
45 |
||
1 Математическое описание электродвигателя
1.1 Расчет параметров математической модели электродвигателя
Упрощенная математическая модель асинхронного двигателя:
![]()
![]()
![]()
![]()
где
![]() - напряжение на статоре;
- напряжение на статоре;
![]() -
активное сопротивление статора;
-
активное сопротивление статора;
![]() -
полный ток статора;
-
полный ток статора;
![]() -
потокосцепление статора;
-
потокосцепление статора;
![]() -
угловая частота вращения магнитного
поля статора;
-
угловая частота вращения магнитного
поля статора;
![]() -
напряжение на статоре;
-
напряжение на статоре;
![]() -
активное сопротивление ротора;
-
активное сопротивление ротора;
![]() -
полный ток ротора;
-
полный ток ротора;
![]() -
потокосцепление ротора;
-
потокосцепление ротора;
![]() -
число полюсов;
-
число полюсов;
![]() -
угловая частота вращения ротора;
-
угловая частота вращения ротора;
![]() -
взаимная индуктивность между обмотками
статора и ротора;
-
взаимная индуктивность между обмотками
статора и ротора;
![]() -
полная индуктивность фазы статора,
-
полная индуктивность фазы статора,
![]() ;
;
где
![]() - индуктивность
рассеяния обмотки статора;
- индуктивность
рассеяния обмотки статора;
![]() -
полная индуктивность фазы ротора,
-
полная индуктивность фазы ротора,
![]() ;
;
где
![]() - индуктивность
рассеяния обмотки ротора;
- индуктивность
рассеяния обмотки ротора;
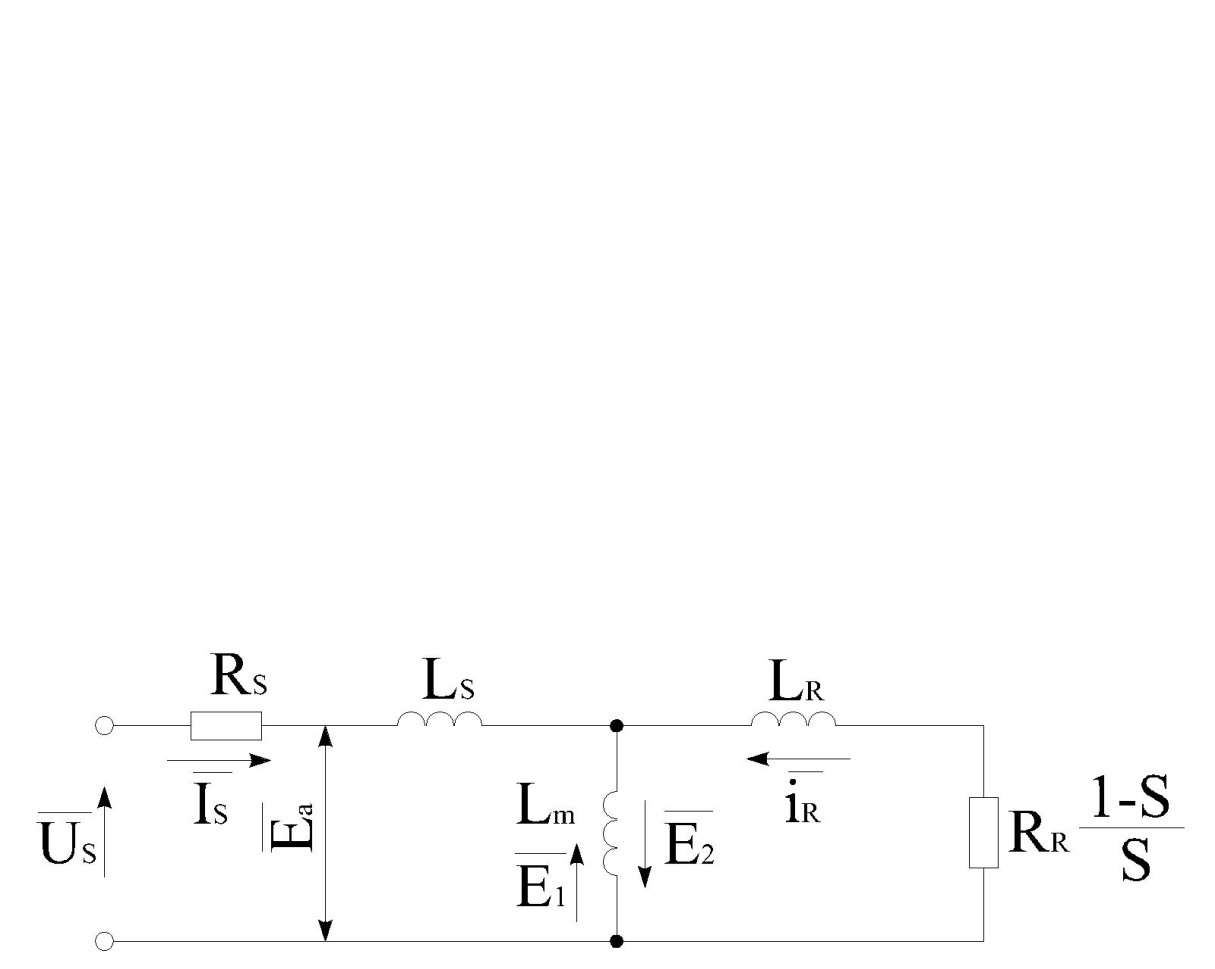
Рисунок 1 – Т-образная схема замещения машины
Таблица 1 – Исходные данные двигателя А280S2
-
Параметр
Значение
Ед. изм.
Мощность
110
кВт
Частота вращения
2960
об/мин
Номинальное напряжение
380
В
Номинальный ток
198
А
cos φ при 100% загрузке
0,9
o.e.
cos φ при 75% загрузке
0,89
o.e.
η при 100% загрузке
93,7
%
η при 75% загрузке
93,7
%
Кратность пускового тока
7,5
o.e.
Кратность пускового момента
2,5
o.e.
Кратность максимального момента
3,3
o.e.
Момент инерции
0,6
кг·м2
Номинальное скольжение Sн
0,013
o.e.
Расчет Т-образной схемы замещения (см. рисунок 1) электрической машины по исходным данным в таблице 1.
Для расчета Т-образной схемы замещения воспользуемся методикой изложенной в [4].
Переходные индуктивности статора и ротора:
![]()
![]()
Взаимная индуктивность статора и рота приведенная к статору:
![]()
Индуктивность статора и ротора:
![]()
![]()
Коэффициент магнитной связи статора и ротора:
![]()
![]()
Таблица 2 – Расчетные величины
-
Параметр
Значение
Ед. изм.
Номинальная частота вращения ротора

309,97
с-1
Номинальный момент Мн
354,87
Н·м
Пусковой момент Мп
887,18
Н·м
Номинальный ток статора Iн
198
А
Критическое скольжение sкр
0,09293
Сопротивление
активное статора RS
0,02257
Ом
активное ротора RR
0,01571
Ом
реактивное статора XS
0,07035
Ом
реактивное ротора XR
0,09715
Ом
Сопротивление взаимоиндукции Xm
5,728
Ом
Полная индуктивность
статора LS
0,01846
Гн
ротора LR
0,01854
Гн
Взаимная индуктивность статора и ротора приведенная к статору Lm
0,01823
Гн
Коэффициент магнитной связи
статора kS
0,9875
ротора kR
0,9833