

15.План швидкості кулісного механізму (приклад).
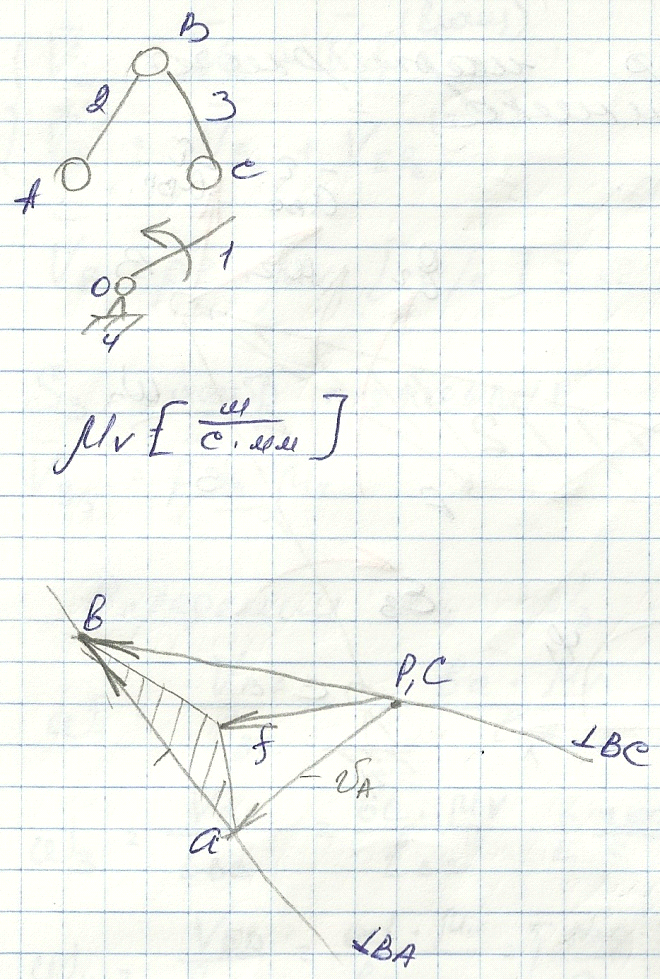
16.План прискорень механізму шарнірного чотирьохланника (приклад).

Дано: li,w1,1,Vi,i
Определить:ai,i
План ускорений строится в соответсвии со структурой механизма
Определим
ускорение внешних шарниров в 2х поводковой
группе шарниры А и С
Во вращательном движении относительное ускорение состоит из 2х векторов (нормального и тангенциального) эти вектора взаимноперпендикулярны. м/с2
м/с2
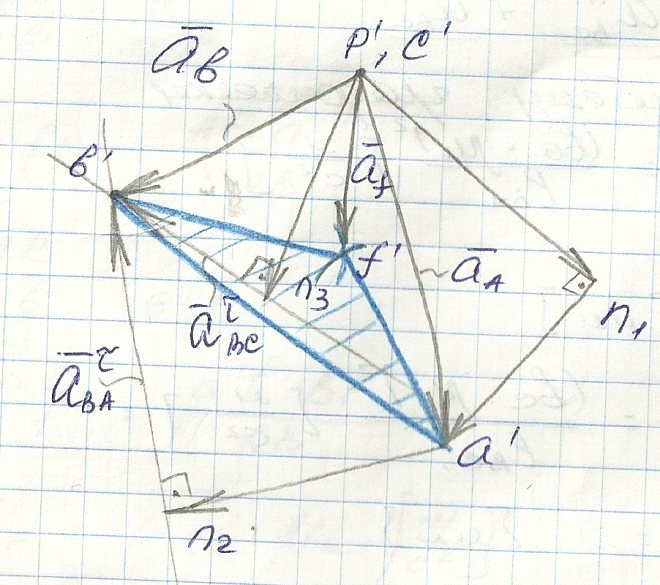
Отложем на плане ускорений вектор
нормального ускорения . Нормальное
ускорение всегда вдоль звена к центру
вращения. Длину 1-го вектора выбираем
сами .
/=…(мм)
направленно тангенциальное ускорение
в сторону эпсилант1 перпендикулярно
звену. ас=0.
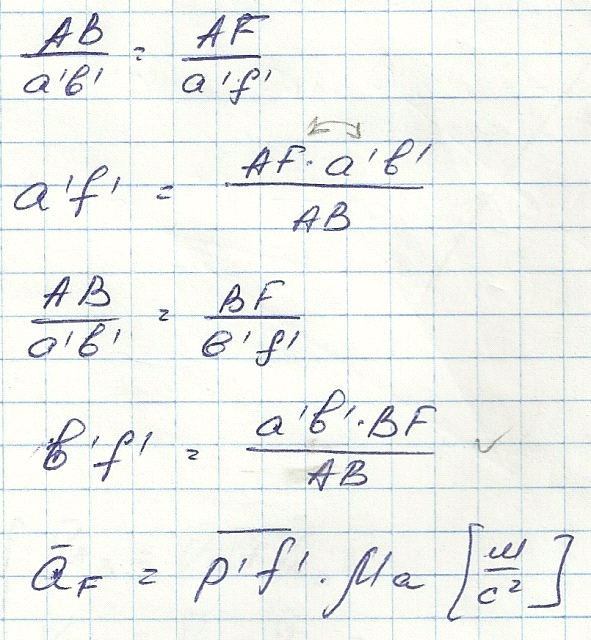
Для определения ускорения шарнира В
составим систему из 2-х вектор уравнений.

Для
определения ускорения т.F на треугольном
звене 2 воспользуемся теоремой о картине
относительных ускорений. Теорема:
Картина относительных ускорений подобна
фигур механизм и повернута относительно
последней
Треугольники
a’b’f’
и
ABF подобны и будем строить его по трем
сторонам
20.Поннятя про механічні характеристики машини та про цикли машини.
Силы действующих в машинах
1.Движущая сила и моменты Мр ,Fр , они приложены к веду щему звену механизма и соверашет поолжительную роботу.
2.Моменты и силы сопротивления Mq,Fc
А)Сила сопротивления среди в которой роботает механизм
Б)Технологическое сопротивление Fc
3.Сила тяжести Gi=mi*g
4.Сила упругости звения F=-k*x
5.Инерциальные нагрузки Фi=-mi*asi ,Mi=-Isi*Ei
Все расматриваемие сили назв внешними они как бы приложении к звени механизма .
1 и 2 вид назв механическими характеристиками машины.
Если в процессе работы механизма , характеристика постоянно повторяеться свой вид то она назв периодической или циклической .
В кинетических парах звения действуют друг на друга силами которими назв внутренними .
21.Сили інерції. Розрахунок сили інерції у випадку чисто поступального руху ланки. І чисто обертальний рух ланки.
Силы инерции и моменты сил инерции возникают при изменении скорости движения звеньев. Силы инерции препятствуют движению при ускорении и способствуют ему при замедлении.
1.Поступательное движение .

2.Вращательное движение .
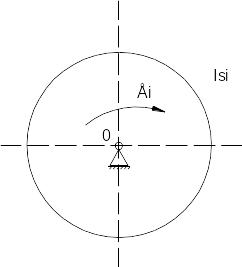
22.Розрахунок сили інерції якщо ланка виконує обертальний рух, при цьому центр ваги збігається з центром обертання.
L=zsi + Sinα = zs i+ Isi/mi* zsi
Заменим действие сили и момента одной только силой , на расстояния в равной между собой и противоположно направленной .
В етом случае звено превращаетца в физический маятник .
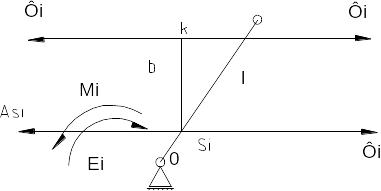
26.Розрахунок реакції у дво-повідковій групі з внутрішньою поступальною парою.

Приложим реакцию между звениями 1 и 2 перпендикулярно движению ползуна так как щитаеэм что ползун движетца без звения и перекоса.
F2g τ =Фі1*hі1*ml – Фі2*hi2*ml / AC*ml
F12-? F2gn-?
Для етого запишем векторную суму сил действующих на звено 2 , причем F= 0 в этой суме 1 и последними членами записываются неизвестно силы
F12+ Фі2+ F2g τ + F2gn
F2g= F2g τ+ F2gn
Определим реакцию F1p в шарнире А
Записиваем векторную суму сил действующих на всё 2 поводковую групу и приравняєм ету суму к 0.
Фі2+ F2g+ Фі1+ F1p=0
27.Кінето-статичний розрахунок механізму. Визначення вріноважуючого моменту методом планів сил. Приклад. Кінетостатика механізмів, розділ теорії машин і механізмів, в якому методом так званого силового розрахунку визначають реакції елементів кінематичних пар механізму за умови, що закон його руху відомий
1.Для заданного положение механизма находят план скоростей и план ускорения
2.План скоростей поварачивают на 90 градусов и считая что все шарниры констуркции образуют жосткую фігуру прикладывают соответсвующие сили действующих на констурукцию .
3. Действующий инерциальинй момент приводят к соотвествующему масштабу плана механизму.
4. Известние сили прикладивают к точками жосткова тела плана скоростей определяют относительно полюса плеча сил , записивают уравнения равновесия.
5.Величина уравновешивающева момента определяэтца из условий равновесий шатуна .
Силовой расчет механизмов ведем в предположении, что трение в кинематических парах отсутствует и все силы, действующие на звенья механизма, расположены в одной плоскости.
При отсутствии сил трения сила взаимодействия между 2-мя звеньями всегда направлена по нормали к поверхности их касания. В поступательной паре все элементарные силы взаимодействия и их равнодействующая будут расположены перпендикулярно направляющей поступательной пары.
Наиболее удобным методом силового расчета механизма является метод планов сил.
При
силовом расчете механизм расчленяется
на отдельные группы, при этом расчет
начинается с группы, присоединенной
последней в процессе образования
механизма, а заканчивается расчетом
ведущего звена начального механизма.
Если плоский механизм имеет одну степень
свободы, то начальный механизм состоит
из 2-х звеньев: неподвижного (стойка) и
начального звена. Эти звенья образуют
либо вращательную кинематическую пару
(кривошип-стойка), либо поступательную
пару (ползун-направляющие). Звено, к
которому приложена уравновешивающая
сила Fу,
будем считать при силовом расчете
начальным звеном механизма. Реакция в
начальном вращательном механизме
зависит от способа передачи энергии
начальному звену источником энергии.
Если кривошипный
вал приводится во вращение парой,
например, непосредственно от
электродвигателя, то в этом случае к
валу приложен уравновешивающий момент.:
Му=R3,2·h
 Нм
Нм и реакция в опоре О вала (звено 1) будет
равна действию звена 3 на звено 2
(кривошип) (рис.7).
и реакция в опоре О вала (звено 1) будет
равна действию звена 3 на звено 2
(кривошип) (рис.7).

Рис.7
Рассмотрим на примере двухповодковой группы шатун АВ-ползун В кривошипно-ползунного механизма ДВС способ силового расчета, основанный на методе планов сил (рис.8).

Рис.8
На звенья этой группы действуют силы:
F – давление газов на поршень;
G3, G4 – силы тяжести;
Fu3, Fu4 – результирующие силы инерции;
R1,4 – давление направляющих на ползун;
R2,3 – давление кривошипа на шатун.
Условие равновесия группы:

Раскладываем давление R2,3 на составляющие:
 ,
действующие:
,
действующие:
 - вдоль оси звена 3
(шатун);
- вдоль оси звена 3
(шатун);
 - перпендикулярно
к оси звена 3.
- перпендикулярно
к оси звена 3.
Составляющую определим из уравнения моментов всех сил, действующих на шатун АВ, относительно точки В:
 или
или

откуда:
Строим план сил по уравнению равновесия группы.
Проводим
вектор
 из начала вектора
из начала вектора
 .
Через его начало проводим линию действия
до пересечения с линией действия R1,4
,
.
Через его начало проводим линию действия
до пересечения с линией действия R1,4
,
проведенной
из конца вектора

 .
R2,3
– давление в кинематической паре А.
.
R2,3
– давление в кинематической паре А.
Планы сил строим в масштабе μр=500 Н/мм, 200 Н/мм, 100 Н/мм.
Давление
R3,4
в паре шатун-ползун определяем из
условия равновесия ползуна:
 .
.
Точкой
приложения
 и
и
 будет точка В, т.к. силы F,
Fu4
и G4,
действующие на ползун, проходят через
эту точку.
будет точка В, т.к. силы F,
Fu4
и G4,
действующие на ползун, проходят через
эту точку.
Давление R1,2 в паре О-2 «Кривошип-стойка» и уравновешивающий момент Му определяем из условия равновесия кривошипа ОА (вес кривошипа и противовеса не учитываем, т.к. в большинстве положений он незначителен по сравнению с величиной R3,2).

μр – масштаб плана сил;
h3 – плечо силы R3,2 относительно точки О на схеме механизма;
μе – масштаб длин кинематической схемы.