

2.2.4. Динамические характеристики
Из уравнения (2.57) с учетом (2.6) тем же методом, что и для двигателя независимого возбуждения получим структурную схему динамической модели двигателя, представленную на рис. 2.15, где обозначено Tя=Lяс/Rяс. Мы видим, что полученная структурная схема отличается от схемы (см. рис. 2.9) наличием дополнительной связи по производной от потока и зависимостью потока от тока якоря. В связи с эти поток всегда переменный и динамическая модель нелинейная во всех случаях.
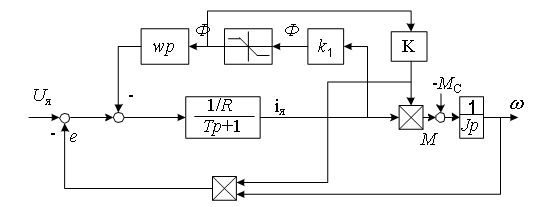
Рис. 2.15. Полная структурная схема двигателя последовательного возбуждения как динамической системы
Линеаризовать ее можно только в режиме малых отклонений переменных, принимая Iя=Iя0+Δiя, Uя=Uя0+ΔUя, ω=ω0+Δω, M=M0+ΔM, Φ=Φ0+ΔΦ, где значения координат с индексом ноль означают их исходное состояние, относительно которого рассматриваются отклонения. Для этого считаем, что |Φ|<|Φнс|, а нелинейные элементы типа произведение линеаризуем известными в математике методами, представив их в виде
(2.66)
ΔM(ΔΦ,Δiя)≅KΦ0Δiя+Kiя0ΔΦ=2Kk1iя0Δiя,
(2.67)
Δe(ΔΦ,Δiя)≅KΦ0Δω+Kω0ΔΦ=Kk1iя0Δω+Kk1ω0Δiя.
Преобразованная с учетом (2.66), (2.67) структурная схема имеет вид рис. 2.16.
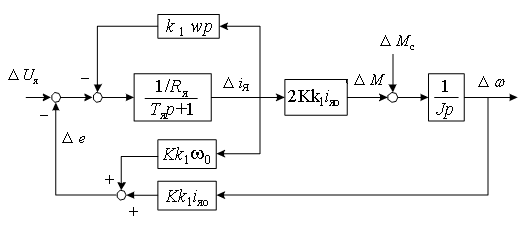
Рис. 2.16. Структурная схема линеаризованной динамической модели двигателя последовательного возбуждения
Известными
методами структурных преобразований
эту схему нетрудно привести к виду (рис.
2.17), где обозначено
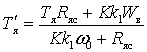 –
электромагнитная постоянная времени
якорной цепи.
–
электромагнитная постоянная времени
якорной цепи.
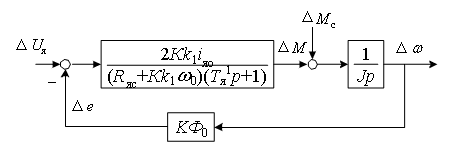
Рис. 2.17. Преобразованная структурная схема линеаризованной динамической модели
Из полученной структурной схемы несложно получить передаточные функции двигателя по управлению и по возмущению:
(2.68)

(2.69)

(2.70)

где
kω=1/(2KΦ0), kμ=2KΦ0/(Rяс+Kk1ω0), kв=(Rяс+Kk1ω0)/(KΦ0), Tм1=J(Rяс+Kk1ω0)/(2(KΦ0)2).
Таким образом, в режиме малых отклонений переходные процессы в двигателе последовательного возбуждения, если не учитывать контур вихревых токов, не отличаются от переходных процессов двигателя независимого возбуждения, хотя при больших отклонениях координат, например при пуске, различие может быть существенным. Расчет переходных процессов при больших отклонениях координат необходимо вести путем точного моделирования всех нелинейностей, включая и кривую намагничивания.
Двигатели постоянного тока: классификация, характеристики
Для самовозбуждения генератора необходимы следующие условия:
- наличие остаточного магнитного потока Фо,
- направление остаточного магнитного потока должно совпадать с
направлением потока возбуждения,
- сопротивление цепи возбуждения не должно превышать некоторого
критического значения.
|
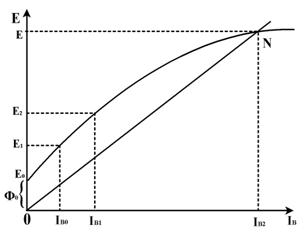
Принцип
самовозбуждения в ГПТ реализуется
следующим образом: магнитным потоком
Фо в обмотке якоря индуктируется Ео. В
обмотке возбуждения, подключенной к
цепи якоря, возникает ток Iво. Ток Iво
возбуждает магнитный поток Ф > Фо.
Потоком Ф индуктируется Е1
> Eo,
под действием Е1
возникает новый ток Iв
> Iво
и т.д. Процесс
самовозбуждения закончится, когда
ЭДС станет равна падению напряжения на
сопротивлениях цепей якоря и возбуждения
Е
= Iв
R,
где
![]() R
= Rя
+ Rв
+ Rp,
Rя,
Rв,
Rp
- сопротивления обмотки якоря, обмотки
возбуждения, регулировочного реостата,
включенного последовательно с
обмоткой возбуждения.
R
= Rя
+ Rв
+ Rp,
Rя,
Rв,
Rp
- сопротивления обмотки якоря, обмотки
возбуждения, регулировочного реостата,
включенного последовательно с
обмоткой возбуждения.
Другими
словами процесс самовозбуждения
закончится, когда характеристика
холостого хода Е = f(Iв)
пересечется с прямой
![]() .
.
В зависимости от способа включения обмоток возбуждения и якоря различают такие схемы возбуждения двигателей постоянного тока (ДПТ):
1 - магнитоэлектрические ДПТ, здесь рабочий поток создается постоянными магнитами. Это, как правило, двигатели малой мощности.
2 - ДПТ параллельного возбуждения, здесь поле создается шунтовой обмоткой.
3 - ДПТ последовательного возбуждения, здесь для создания поля служит сериесная обмотка.
4 - ДПТ смешанного возбуждения.
Работа ДПТ оценивается по совокупности следующих величин:
- напряжение питания U, В,
- потребляемый ток I, А,
- механическая мощность на валу Р2, Вт,
- вращающий момент М, Нм,
- частота вращения якоря n, мин ,
- ток возбуждения Iв, А.
Существенную роль при анализе работы ДПТ играют также и различные зависимости между указанными величинами, к этим характеристикам относятся: пусковые, рабочие, регулировочные и механические.
К пусковым характеристикам в первую очередь относят пусковой ток и пусковой момент.
Под рабочими характеристиками понимают зависимости частоты вращения, вращающего момента, КПД и тока якоря от Р2:
n,
M,
![]() ,
Iя = f(P2),
при U
= Uном
и Iв = Iвном
,
Iя = f(P2),
при U
= Uном
и Iв = Iвном
Регулировочные характеристики определяют свойства ДПТ при регулировании частоты вращения якоря.
Для электроприводов важное производственное значение имеют, так называемые, механические характеристики ДПТ, представляющие собой зависимости
n = f(M) при U = const
|
 Р
Р
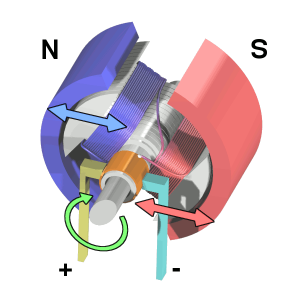
Двигатель постянного тока — электрическая машина машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
Простейший двигатель на рисунке 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент.
|
 Р
исунок
2 - Коллекторный двигатель постоянного
тока с двухполюсным статором и с
трёхполюсным ротором
Р
исунок
2 - Коллекторный двигатель постоянного
тока с двухполюсным статором и с
трёхполюсным роторомДвигатель на рисунке 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рисунок 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название "двигатель переменного тока" имеет то же сокращение - ДПТ. Но так как двигатели переменного тока разделяются на асинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.