

2.2.2. Режимы работы
Мы рассмотрели характеристики в двигательном режиме. Из рассмотренных для двигателя независимого возбуждения тормозных режимов в данном случае могут быть реализованы не все. Действительно, согласно (2.58) скорость холостого хода двигателя стремится к бесконечности, следовательно, режим рекуперативного торможения невозможен.
Динамическое торможение может быть осуществлено двумя способами – с самовозбуждением и с независимым возбуждением. В первом случае двигатель отключается от сети и включается на резистор. Для возникновения режима самовозбуждения необходимо выполнение двух условий. Во-первых, чтобы исключить размагничивание машины, при переходе от двигательного режима к генераторному необходимо оставить неизменным направление тока в обмотке возбуждения. Указанное условие вытекает из того, что самовозбуждение двигателя возникает за счет явления остаточной намагниченности полюсов при нулевом токе возбуждения. Эта намагниченность обусловлена явлением гистерезиса при перемагничивании стали. Из-за остаточной намагниченности полюсов при вращении якоря в его обмотке наводится э.д.с., под влиянием которой в якорной цепи, куда входит и обмотка возбуждения, протекает ток. Если поток от этого тока будет совпадать с потоком от остаточной намагниченности, то э.д.с. двигателя будет увеличиваться, т.е. двигатель перейдет в генераторный режим. В противном случае ток, обусловленный остаточной э.д.с., размагнитит двигатель до нулевого потока и генераторный режим не возникнет.
Во-вторых, для возникновения самовозбуждения необходимо, чтобы зависимость Eя(Iя), при скорости на которой реализуется тормозной режим, и вольтамперная характеристика сопротивления, включенного в якорную цепь Ur(Iя), пересекались не только в начале координат. Например, для характеристик, представленных на рис. 2.14, при скорости ω1 самовозбуждение возникает, а при ω2 – не возникает.
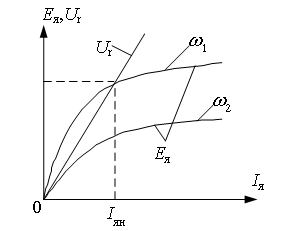
Рис. 2.14. К пояснению условий возникновения режима самовозбуждения
Торможение с независимым возбуждением осуществляется путем отключения обмотки возбуждения от якорной цепи и подключения ее к источнику питания. Недостатком такого способа является необходимость обеспечения тока возбуждения, равного номинальному при небольшом напряжении, для чего требуется специальный источник, поэтому такой способ торможения практически не используется.
2.2.3. Способы регулирования момента и скорости
Так как поток в данном двигателе не может регулироваться независимо, здесь возможны только два способа регулирования: изменением сопротивления в цепи якоря и изменением напряжения. Выше мы уже отмечали низкую эффективность регулирования двигателей постоянного тока по энергетическим показателям при регулировании путем изменения сопротивления в якорной цепи, поэтому подробно рассмотрим регулирование изменением напряжения. Семейство искусственных характеристик для этого случая представлено на рис. 2.13.
При регулировании скорости примем U=var, M=const. Тогда регулировочная характеристика, при M<Mнс, получит вид
(2.61)
ω=au+b,
где a=1/sqrt(Kk1M), b=Rяс/(Kk1). А при M≥Mнс – описывается выражением (2.21).
Таким образом, имеем уравнения того же вида, что и для двигателей независимого возбуждения. Регулирующий параметр изменяется в интервале u=[b/a,Uн]. Передаточный коэффициент определяется выражением
(2.62)
 .
.
Теперь примем U=var, ω=const и из уравнения (2.59) при M<Mн получим
(2.63)
M=u2d,
где
(2.64)
d=1/(Kk1(ω+Rяс/Kk1)2).
Если двигатель находится в насыщении, регулировочные характеристики приближенно могут быть представлены выражением (2.21).
Для определения электромагнитного к.п.д. двигателя из уравнения (2.58) найдем ток якоря:
Iя=Uя/(ωKk1+Rяс).
Мощность, потребляемая двигателем, и электромагнитная мощность определяется выражениями, соответственно
Pп=UяIя=U2/(ωKk1+Rяс),
Pэ=EIя=Kk1IяωIя=Kk1ωUя2/(Kk1ω+Rяс)2.
Отсюда
(2.65)
ηэ=Pэ/Pп=ωKk1/(ωKk1+Rяс).
Можно отметить, что по энергетическим показателям двигатели последовательного возбуждения чаще всего проигрывают двигателям независимого возбуждения. Это объясняется тем, что активное сопротивление якорной цепи, куда входит и обмотка возбуждения, в первом случае много больше, чем во втором. Кроме того, двигатели независимого возбуждения могут быть выполнены на основе постоянных магнитов, тогда энергия для возбуждения из сети не потребляется, что способствует увеличению общего к.п.д.
Напомним, что рассмотренные нами характеристики, полученные на основе аппроксимированной кривой намагничивания, являются приближенными и пригодны лишь для качественного анализа процессов.