

26.3 Основные способы построения алгоритмов поиска неисправностей, их краткая характеристика. Обоснование выбора алгоритма, задачи при разработке алгоритмов поиска
1.Способ половинного разбиения.
Часто применяется в случае, если РЭА создана в виде последовательно соединенных элементов. -Диагностируемая аппаратура состоит из n-последовательно соединенных функциональных элементов; она неработоспособна из-за отказа i-го элемента, вероятность состояний P(Si) одинакова для любых функциональных элементов (соответственно одинаковы и стоимости контроля функциональных элементов Zi.)

Рисунок - Функциональная схема устройства
При этих условиях следует контролировать параметр, несущий максимальную информацию о состоянии диагностируемой аппаратуры, неопределенные состояния которой определяются следующей величиной: H0=log2N
2.Способ «время – вероятность».
Применяется
в РЭА в случае, если все функциональные
элементы соединены произвольным образом
и имеют разные вероятности P(Si)
состояний и различные стоимости
проведения контроля параметров C(Zi)
. Эффективность способа оценивается
средним временем контроля одного
параметра. Для определения неисправного
элемента, выбирают набор параметров ,
обеспечивающих поиск до заданной
глубины. Последовательность контроля
параметров устанавливается в порядке
уменьшения величин:
 t-
время на поиск неисправности.
t-
время на поиск неисправности.
3.Способ на основе информационного критерия
Позволяет выбрать минимальное число контролируемых параметров с последовательностью их контроля. Исходные данные для данного способа задаются в виде функциональной модели диагностируемого объекта и таблицей неисправностей, которая составляется в виде транспонированной матрицы состояний, где столбцы соответствуют всем возможным состояниям объекта, а строки параметрам функциональных элементов. Контроль может иметь 2 исхода: параметр в допуске -1, не в допуске -0.Результат контроля некоторого параметра k диагностируемого объекта дает некоторое количество информации: Ik=H0-Hk, где Hk- средняя энтропия диагностируемого объекта.
Путем последующего вычисления значения результатов контроля Ik по его убыванию определяем значимость параметра Zi. Первым контролируется параметр дающий максимальную информацию.
4.Инженерный способ.
Основан на вычислении некоторой функции предпочтения. Исходные данные те же. Функция предпочтения выбирается в соответствии с решаемыми задачами диагностики и исходными данными.
5.Способ ветвей и границ.
Используется для синтеза алгоритма поиска неисправностей в РЭА, его сложной или произвольной функциональной моделью. Позволяет определить наилучшую последовательность поиска среди возможных. Для этого область возможных решений разбивается на меньшие и меньшие подмножества, для которых вычисляется нижняя граница минимизированной функции. Остальные подмножества исключаются из рассмотрения.
Исходными данными являются: функциональная модель, таблица неисправностей с вероятностями различных состояний и стоимостью контроля выходных параметров.
26.4 Струнные и стержневые преобразователи. Режимы работы механических резонаторов
Струнные
и стержневые (вибрационно-частотные)
преобр. являются разновидностью частотных
преобразователей с механическим
резонатором. В этих преобр. чувствительным
элементом служит плоская или круглая
струна — струнные преобраз., или балочка
прямоугольного сечения, изгот. за одно
целое с упругим элементом, — стержневые
преобр-ли. Работа струнных механических
резонаторов основана на исп. изменения
частоты поперечных колебаний струны в
зависимости от ее натяжения. Связь
частоты поперечных колебаний струны с
величиной нормальных механ. напряжений
в ней определяется
 где f
– частота собств. колебаний струны; l
– длина струны; σ
– механич. напряжения в струне; ρ
– плотность материала струны.
где f
– частота собств. колебаний струны; l
– длина струны; σ
– механич. напряжения в струне; ρ
– плотность материала струны.
В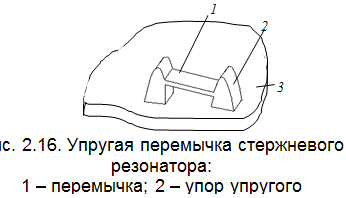
 ходной
величиной струны и стержневых
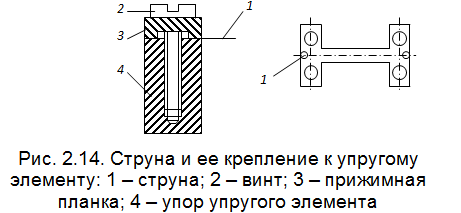
преобразователей является сила. В
большинстве случаев струна работает в
режиме вынужденных деформаций.
Стабильность функции преобразования
опред. качеством крепления предварительно
натянутой струны к упругому элементу.
Лучшим способом крепления ленточных
струн явл. зажим м/у хорошо обработанными
и подогнанными параллельными плоскостями.
ходной
величиной струны и стержневых
преобразователей является сила. В
большинстве случаев струна работает в
режиме вынужденных деформаций.
Стабильность функции преобразования
опред. качеством крепления предварительно
натянутой струны к упругому элементу.
Лучшим способом крепления ленточных
струн явл. зажим м/у хорошо обработанными
и подогнанными параллельными плоскостями.
Решение проблемы крепления, сводящееся к отказу от всякого крепления как такового: роль резонатора выполняет вместо струны тонкая (доли мм) стальная пластинка, изгот. за одно целое с упругим элементом. Под действием прил. силы упругий элемент деформируется и пластина растягивается, при этом повыш. частота собственных колебаний. Датчик с такими преобраз. известны как стержневые или вибрационно-частотные.
Струнные резонаторы с одной струной имеют нелинейность функции преобразования порядка 3…5% и существенную темп. погрешность. В дифференц. струнных преобраз. эти недостатки можно свести к нулю. Конструкция упругого элемента диффер. преобразовате ля предусм. крепление одинаковых струн, причем под возд. деформации частота собст. колебаний одной струны увел., а частота другой ум-ся.
Датчики со стержневыми преобр. применяются как высокочастотные измерители статических и медленноменяющихся давлений, усилий и крутящих моментов. Упругие элементы датчиков изгот. из стали 35ХГСА.
Механические резонаторы исп. в частотных датчиках в режиме свободных колебаний или в автоколеб. режиме. Возбуждение колебаний в резонаторах осущ. 2 методами: электромагнитным, при котором происх. взаимод. струны или перемычки из ферромагнитной стали и перем. магнитного потока, созд. электромагнитным возбудителем; электродинамическим, при котором происходит взаимодействие перем. тока, протек. через струну из диамагнитного материала, и магнитного потока постоянного магнита. Электром. возб. получило больше распр-е.
Н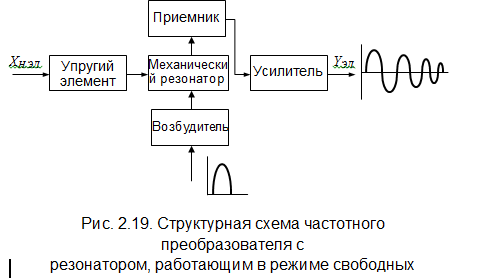 а
рис. 2.19 измеряемая величина ХН.ЭЛ.
преобразуется упругим элементом в
деформацию, от которой зависит частота
собственных
колебаний механического резонатора.
Колебания в резонаторе возбуждаются с
помощью возбудителя, на вход кот. подается
импульс запроса от измерит. ус-ва. Для
преобразования энергии возбужденных
механич. колебаний резонатора в эл.энергию
ис-ся специальный электромагнитный или
индуктивный преобразователь-приемник.
Сигнал с выхода приемника в виде
затухающих колебаний усил-ся и поступает
на выход частотного преобр-ля. Иногда
один и тот же электромех. преобр. исп. в
обратимом режиме в качестве возбудителя
и приемника. Тогда для связи с датчиком
достаточно двухпроводной линии.
а
рис. 2.19 измеряемая величина ХН.ЭЛ.
преобразуется упругим элементом в
деформацию, от которой зависит частота
собственных
колебаний механического резонатора.
Колебания в резонаторе возбуждаются с
помощью возбудителя, на вход кот. подается
импульс запроса от измерит. ус-ва. Для
преобразования энергии возбужденных
механич. колебаний резонатора в эл.энергию
ис-ся специальный электромагнитный или
индуктивный преобразователь-приемник.
Сигнал с выхода приемника в виде
затухающих колебаний усил-ся и поступает
на выход частотного преобр-ля. Иногда
один и тот же электромех. преобр. исп. в
обратимом режиме в качестве возбудителя
и приемника. Тогда для связи с датчиком
достаточно двухпроводной линии.
Частотные преобр. работ.в автоколебательном режиме.
Р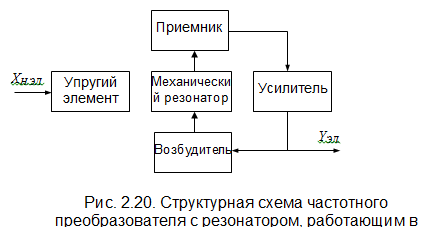 езонатор
получает энергию от возбудителя, на
вход кот. поступает сигнал с выхода
усилителя. Вход усилителя связан с
выходом приемника, преобраз. колебания
того же резонатора. Самовозбуждение
происходит в том случае, если ее коэфф.
передачи (в разомкнутом виде) больше
единицы, а суммарный фазовый сдвиг всех
звеньев равен нулю или целому числу
периодов колебаний. Поэтому при исп.
усилителя с фазовым сдвигом, близким к
нулю, и с достаточно большим коэфф.
усиления самовозбуждение системы
произойдет точно на частоте. “+” этого
режима явл. простота схемной реализации
и непрерывность преобразования.
езонатор
получает энергию от возбудителя, на
вход кот. поступает сигнал с выхода
усилителя. Вход усилителя связан с
выходом приемника, преобраз. колебания
того же резонатора. Самовозбуждение
происходит в том случае, если ее коэфф.
передачи (в разомкнутом виде) больше
единицы, а суммарный фазовый сдвиг всех
звеньев равен нулю или целому числу
периодов колебаний. Поэтому при исп.
усилителя с фазовым сдвигом, близким к
нулю, и с достаточно большим коэфф.
усиления самовозбуждение системы
произойдет точно на частоте. “+” этого
режима явл. простота схемной реализации
и непрерывность преобразования.
Погрешности частотных преобраз. с управляемыми механич. резонаторами состоят из трех сост.: Первая-это погр. преобразования измеряемой величины в промежут. величину – деформацию, от кот. зависит собственная частота резонатора. Эта погрешность опр-ся св-ми упругого элемента и входным преобразователем, если он имеется. Вторая появл. из-за того, что собств. частота резонатора зависит не только от деформации, но и от внеш. факторов, в осн. от тем-ры. Третья –связана с тем, что возбуждаемые в резонаторе колебания имеют частоту, не точно совпадающую с частотой собственных колебаний резонатора. При работе в автокол. режиме величина её зависит от фазовых х-к отдельных эл-ов частотного преобраз., а в режиме свободных колебаний эта составляющая погрешности отсутствует.
Характерная особенность частотных преобразователей с механическими резонаторами: амплитудные погрешности возбудителя, приемника и усилителя не влияют непосредственно на погрешность преобразователя