

33.4 Индукционные преобразователи. Эффект Фарадея
Индукционные преобр-ли. Эффект Фарадея.
Индукционным
является преобразователь (ПР), в кот.
входная мех-кая величина преобр. в
индуцированную электродвижущую силу
(ЭДС). Работают эти ПР на основе закона
Фарадея, согласно которому индуцированная
ЭДС Е
опред. скоростью изменения магнитного
потока Ф,
сцепленного с катушкой из W
витков.
 .
Поэтому естественной входной величиной
ИП явл. скорость линейного или углового
механ. перемещения.
.
Поэтому естественной входной величиной
ИП явл. скорость линейного или углового
механ. перемещения.
По принципу действия ИП можно разделить на две группы. В ПР первой группы магнитное сопротивление на пути магнитного потока в процессе работы остается неизменным, а ЭДС наводится за счет линейного или углового перемещения катушки или постоянного магнита.
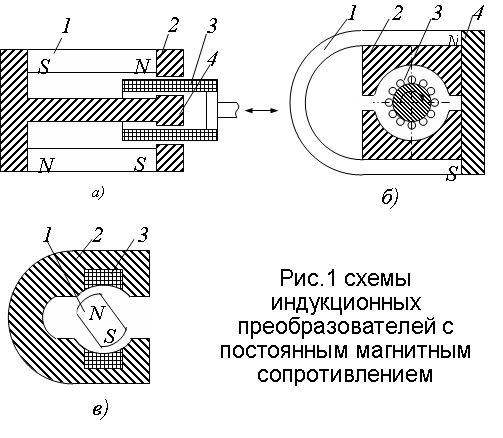
Конструктивные схемы таких ПР показаны на рис. 1. Подвижной частью ПР на рис.1,а является катушка 3, совершающая линейное перемещение между полюсными наконечниками 2 неподвижной магнитной системы, состоящей из двух постоянных магнитов 1 и магнитопровода 4. Подвижная часть ПР на рис. 1,б выполнена в виде ротора 3 с обмоткой, вращающегося между полюсными наконечниками 2 постоянного магнита 1. В конструкции рис.1,в катушка 3 и магнитопровод 2 неподвижны, а угловое перемещ-е совершает постоянный магнит 1.
В
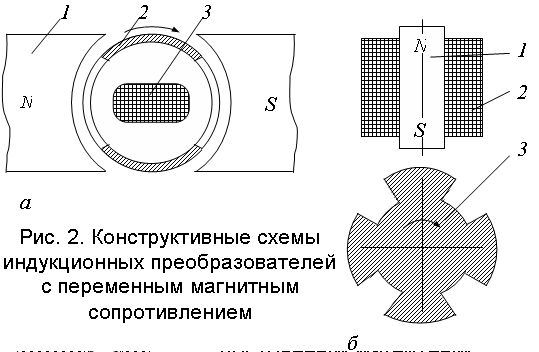
ПР второй группы пост-ный магнит и
катушка неподвижны, а индуцированная
ЭДС наводится за счет изменения магнитного
потока вследствие колебания магнитного
сопротивления. Подвижной частью таких
ПР является тот или иной участок
магнитопровода, совершающий линейное
или угловое перемещение. Наиболее
распространенные конструктивные схемы
таких ПР даны на рис. 2.
б)
Рис. 2.
Конструктивные схемы индукционных
преобразователей с переменным магнитным
сопротивлением

В измерительной технике ИП используются в аналоговых и дискретных режимах работы. В первом случае информационным параметром вых. сигнала является амплитуда индуцированной ЭДС Е, во втором случае информация о скорости перемещения подвижной части ПР заключена в числе импульсов ЭДС Е за фиксированный отрезок времени или в частоте вых. сигнала. Второй вариант использования обеспечивает большую точность измерения, так как на число импульсов на выходе ИП практически не влияют внешние дестабилизирующие факторы. Повышается и помехоустойчивость при передаче сигналов по линии связи.
При аналоговом принципе использования ИП основным источником погрешности является темп-ра, так как приходится считаться с зависимостью индукции постоянного магнита от темп-ры, зависимостью от темп-ры магнитной проницаемости стальных участков магнитопровода и изменением сопротивления катушки. Наиболее распространенный способ уменьшения темп-ной погрешности – испол-ние термомагнитных шунтов как элементов магнитопровода преобразователя. ИП используются в зарезонансном режиме работы, причем их резонансная частота определяется в основном массой подвижных частей, и лежит в пределах от единиц до двух-трех десятков герц.
В силу принципа действия градуироваться эти преобразователи могут только в динамическом режиме.