

4 Датчики. Общие сведения. Ответ
В системах автоматики датчик предназначен для преобразования контролируемой или регулируемой величины в выходной сигнал, более удобный для дальнейшего движения информации.
В общем виде датчик можно представить в виде чувствительного элемента ЧЭ и преобразователя Пр.
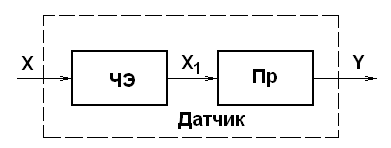
Чувствительный элемент предназначен для преобразования контролируемой величины Х в такой вид Х1, который удобен для измерения. В преобразователе происходит преобразование неэлектрического сигнала Х1 в электрический сигнал Y.
Электрические датчики делятся:
1) параметрические- служат для преобразования неэлектрического параметра в параметры электрической цепи. Получают электрическую энергию от вспомогательного источника энергии.
Делятся на:
Датчики активного сопротивления :
контактные;
реостатные;
потенциометрические
тензодатчики;
терморезисторы
датчики реактивного сопротивления:
индуктивные;
емкостные
2) генераторные- служат для преобразования неэлектрического параметра в ЭДС. Не требуют дополнительного источника энергии. Делятся:
термоэлектрические
пьезоэлектрические
тахометрические
Общие характеристики датчиков.
Статическая характеристика датчика представляет собой зависимость изменения выходной величины от входной, т.е. y=f(x), где х – входная величина, y – выходная величина.
Чувствительность датчика – отношение приращения выходной величины к приращению входной, т.е. S=∆y/∆x. Следовательно, чувствительность есть не что иное, как коэффициент передачи.
Порог чувствительности датчика – наименьшее значение входной величины, которое вызывает появление сигнала на выходе. Этот параметр связан с зоной нечувствительности, т.е. зоной, в пределах которой при наличии входного сигнала на выходе датчика сигнал отсутствует.
Инертность датчика – время, в течении которого выходная величина принимает значение, соответствующее входной величине.
По характеру получения сигнала от измеряемой величины датчики разделяют на параметрические, в которых изменение измеряемой величины вызывает изменение какого либо параметра (сопротивления, давления, индуктивности и т.д.), и генераторные, у которых изменение измеряемой величины вызывает генерацию сигнала (термо ЭДС, фототок и т.д.). Генераторные датчики не требуют постороннего источника энергии.
По характеру зависимости выходного сигнала от входного различают датчики: пропорциональные, у которых сигнал на выходе пропорционален измеряемому сигналу; нелинейные, у которых сигнал на выходе нелинейно зависит от сигнала на входе; релейные, у которых сигнал на выходе изменяется скачкообразно; циклические, у которых сигнал на выходе пропорционален измеряемой величине или нелинейно зависит и повторяется циклически; импульсные, у которых изменение входной величины вызывает появление импульсов, число которых пропорционально измеряемой величине. Схемы включения измерительных и преобразовательных элементов датчика могут быть дифференциальные, компенсационные, мостовые и т.д.
Билет 5
Схема пуска ДПТ независимого возбуждения в функции времени.
Назначение схемы.
Изобразите схему
Раскройте принцип действия схемы
Изобразите механические характеристики пуска в функции времени.
Достоинства и недостатки схемы.
Ответ:
Назначение схемы
Схема предназначена для автоматизации процесса пуска ДПТ, за счет использования реле времени. Разомкнутые схемы обеспечивают защиту ЭП при возникновении не нормальных режимов работы: КЗ, перегрузок ДВ, исчезновения напряжения питания, обрыва одной из фаз и т.д.
Изобразите схему
Раскройте принцип действия схемы
Во избежание повышения тока при пуске в цепь якоря ДПТ включены пусковые резисторы Rd2, Rd1. Автоматизация процесса пуска заключается в использовании реле времени, которые после включения цепи якоря контактором КМ через определенные промежутки времени замыкают сначала контакт КТ1, а затем КТ2, тем самым шунтируя пусковые резисторы Rd1 и Rd2 соответственно.
Время выдержки реле подбираются так, чтобы на момент включения контактов КТ1 и КТ2 угловая скорость двигателя достигала значений ωd и ωb соответственно.
Изобразить механическую характеристику пуска в функции времени
Достоинства
Простата схемной реализации
Недостатки
При снижении напряжения сети или увеличение момента сопротивление (нагрузка на валу) длительность разгона возрастает и при срабатывании контакторов КТ1 и КТ2, угловая скорость не достигает значений ωd и ωb - это вызовет увеличенные броски тока.
2. Электромеханические стабилизаторы напряжения.
Ответ
Электромеханические стабилизаторы предназначены для плавного регулирования выходного напряжения. Одним из способов является использование короткозамкнутой подвижной обмотки в автотрансформаторе. Автотрансформатор в этом случае выполняется на трехстержневом Ш-образном магнитопроводе (рисунок 1). На среднем стержне этого магнитопровода расположены две намотанные встречно одинаковые обмотки 1 и 2. На среднем стержне также располагается короткозамкнутая обмотка 3, примерно равная по высоте обмоткам 1и 2 (эта обмотка может быть выполнена виде сплошной рамки). При перемещении обмотки 3 вдоль стержня она охватывает витки обмоток 1 и 2 в разном соотношении в зависимости от своего месторасположения.
Например, когда обмотка 3 находится в верхнем положении и внутри нее расположена обмотка 1, сопротивление последней становится очень малым. Это объясняется тем, что обмотка 3, выполняющая в данном случае функции вторичной обмотки по отношению к обмотке 1, замкнута накоротко, а сопротивление трансформатора, у которого вторичная обмотка замкнута накоротко, мало и определяется в основном индуктивностями рассеяния и активными сопротивлениями обмоток. В этом случае напряжение , подводимое к автотрансформатору, оказывается почти полностью приложенным к обмотке 2. Магнитные потоки, вызванные этим напряжением, замыкаются преимущественно по участкам магнитопровода, указанным на рисунке 1 пунктиром. Очевидно, что выходное напряжение автотрансформатора Uвых в этом случае мало.
Если обмотка 3 находится в крайнем нижнем положении, то сопротивление обмотки 2 становится мало и напряжение оказывается почти полностью приложенным к обмотке 1. В результате выходное напряжение становится примерно равным входному. Когда обмотка 3 занимает промежуточное положение вдоль стержня, напряжение перераспределяется между обмотками 1 и 2. Изменяя положение обмотки 3, можно регулировать Uвых практически от нуля до Uвых = . Основным недостатком схемы являются низкое значение коэффициента мощности по входу и плохие массо-габаритные показатели.
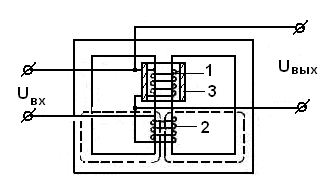
Рисунок 1.