

Мировые и экранные координаты
При отображении пространственных объектов на экране или на листе бумаги с
помощью принтера необходимо знать координаты объектов. Мы рассмотрим две системы координат. Первая — мировые координаты, которые описывают истинное положение объектов в пространстве с заданной точностью. Вторая — система координат устройства отображения, в котором осуществляется вывод изображения объектов в заданной проекции. Назовем систему координат графического устройства экранными координатами (хотя это устройство и не обязательно должно быть подобно монитору компьютера).
Пусть мировые координаты будут трехмерными прямоугольными координатами. Где должен размещаться центр координат, и какими будут единицы измерения вдоль каждой оси, для нас сейчас не очень важно. Важно то, что для отображения мы будем знать любые числовые значения координат отображаемых объектов.
Для получения изображения в определенной проекции необходимо вычислить координаты проекции. Для синтеза изображения на плоскости экрана или бумаге используем двумерную систему координат. Основная задача — задать преобразования координат из мировых в экранные.
Основные типы проекций
Изображение объектов на плоскости (экране дисплея) связано с геометрической операцией проектированием. В компьютерной графике используется несколько видов
проектирования, но основных - два вида: параллельноеицентральное.

Проектирующий пучок лучей направляется
через объект на картинную плоскость, на которую в дальнейшем находят координаты пересечения лучей (или прямых) с этой плоскостью.
Рис. 2.14. Основные типы проекций
Прицентральномпроектировании все прямые исходят из одной точки.
При параллельном - считается, что центр лучей (прямых) бесконечно удален, а прямые параллельны.
Каждый из этих основных классов разбивается еще на несколько подклассов в
зависимости от взаимного расположения картинной плоскости и координатных осей.
Перспективные (центральные) проекции
Одноточечная проекция
Трехточечная проекция
Двухточечная проекция
Параллельные проекции
Аксонометрическая проекция
Триметрическая проекция
Диметрическая проекция
Косоугольная проекция
Свободная проекция
Ортографическая проекция
Кабинетная проекция





Изометрическая проекция
Рис. 2.15. Классификация плоских проекций

У параллельных проекций центр проекции расположен в бесконечности от плоскости проекции:
ортографические (ортогональные),
аксонометрические (прямоугольные аксонометрические) - проекторы перпендикулярны к плоскости проекции, расположенной под углом к главной оси,
![]() косоугольные (косоугольные аксонометрические) - плоскость проекции
перпендикулярна
к
главной
оси,
проекторы
расположены
под
углом
к
плоскости
косоугольные (косоугольные аксонометрические) - плоскость проекции
перпендикулярна
к
главной
оси,
проекторы
расположены
под
углом
к
плоскости
проекции.
У центральных проекций центр проекции находится на конечном расстоянии от
плоскости проекции. Имеют место так называемые перспективные искажения.
Ортогональные проекции (основные виды)
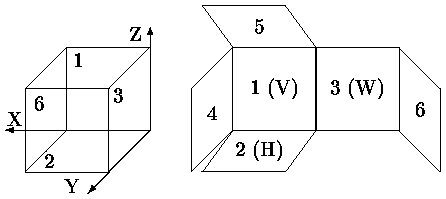
Рис. 2.16. Ортогональные проекции
Вид спереди, главный вид, фронтальная проекция, (на заднюю грань V),
Вид сверху, план, горизонтальная проекция, (на нижнюю грань H),
Вид слева, профильная проекция, (на правую грань W),
Вид справа (на левую грань),
Вид снизу (на верхнюю грань),
Вид сзади (на переднюю грань).
Матрица ортогональной проекции на плоскость YZ вдоль оси Х имеет вид:

 0
0
0
0
0
0
0
0
0 1 0 0
PX
0 0 1 0
0 0 0 1
тогда:
Если же плоскость параллельна, то эту матрицу надо умножить на матрицу сдвига,
0 0 0 0
0 1 0 0
PX
, где р - сдвиг по оси Х;
0 0 1 0
p 0 0 1
Для плоскости ZX вдоль оси Y
0 0 0 0
0 0 0 0
PX
, где q - сдвиг по оси Y;
0 0 1 0
0 q 0 1
Для плоскости XY вдоль оси Z:
0 0 0 0
0 1 0 0
PX
, где R - сдвиг по оси Z.
0 0 0 0
0 0 R 1
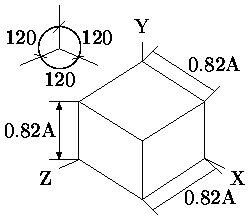
При аксонометрической проекции проектирующие прямые перпендикулярны плоскости картинки.
Изометрия - все три угла между нормалью картинки и координатными осями
равны.
Диметрия - два угла между нормалью картинки и координатными осями равны.
Триметрия - нормальный вектор плоскости картинки образует с координатными
осями различные углы.
Каждый из трех видов этих проекций получается комбинацией поворотов, за которой следует параллельное проектирование.
сos |
sin cos |
0 |
0 |
cos |
0 |
sin |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
cos |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
cos |
sin |
0 |
0 |
1 |
0 |
0 |
sin |
sin cos |
0 |
0 |
sin |
0 |
cos |
0 |
0 |
sin |
cos |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
При повороте на угол β относительно оси У (ординат), на угол α вокруг оси Х (абсцисс) и последующем проектировании оси Z (аппликат) возникает матрица









M
Изометрическая проекция
Диметрическая проекция
Рис. 2.17. Изометрические проекции
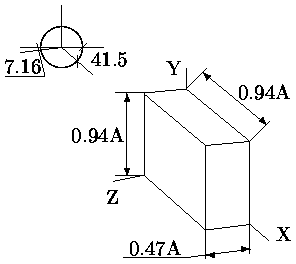
Рис. 2.18. Диметрические проекции
Косоугольныепроекции

Классический пример параллельной косоугольной проекции — кабинетная проекция (рис. 2. 26). Эта проекция часто используется в математической литературе для черчения объемных форм. Ось у изображается наклоненной под углом 45 градусов. Вдоль оси у масштаб 0. 5, вдоль других осей — масштаб 1. Запишем формулы вычисления координат плоскости проецирования
Здесь, как и раньше, ось Υпр направлена вниз.
Для косоугольных параллельных проекций лучи проецирования не
перпендикулярны плоскости проецирования.
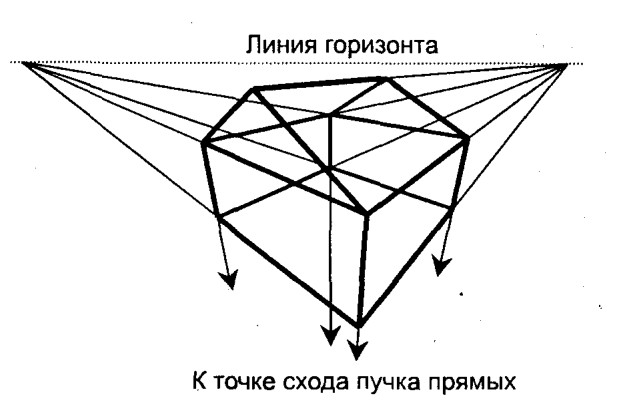
Рис. 2.19. Косоугольные проекции
Теперь относительно центральной проекции. Поскольку для нее лучи проецирования не параллельны, то будем считать нормальной такую центральную проекцию, главная ось которой перпендикулярна плоскости проецирования. Для центральной косоугольной проекции главная ось не перпендикулярна плоскости проецирования.
Рассмотрим пример центральной косоугольной проекции, которая показывает

 параллельными
линиями
все
вертикальные
линии
изображаемых
объектов.
Расположим
плоскость
проецирования
вертикально,
ракурс
показа
зададим
углами
а,
β
и
положением
точки
схода
(рис.
2.
21).
параллельными
линиями
все
вертикальные
линии
изображаемых
объектов.
Расположим
плоскость
проецирования
вертикально,
ракурс
показа
зададим
углами
а,
β
и
положением
точки
схода
(рис.
2.
21).
Рис.2.20.
Кабинетная проекция
Рис. 2.21. Вертикальная центральная косоугольная проекция: а – расположение плоскости проецирования, б – вид с левого торца плокости
проецирования
Будем считать, что ось Ζ видовых координат располагается перпендикулярно плоскости проецирования. Центр видовых координат — в точке (хс, ус, zc). Запишем соответствующее видовое преобразование:

Как и для нормальной центральной проекции, точка схода лучей проецирования располагается на оси Ζ на расстоянии Ζk от центра видовых координат. Необходимо учесть наклон главной оси косоугольной проекции. Для этого достаточно отнять от Υпр
длину отрезка 0-0' (рис. 2.21). Эта длина равняется (Ζk - Ζпл) ctgβ. Теперь запишем
результат — формулы вычисления координат косоугольной вертикальной проекции
![]()
где Пх и Пу — это функции проецирования для нормальной проекции.
Следует отметить, что для такой проекции нельзя сделать вид сверху (β = 0),
поскольку здесь сtgP = ∞.
Свойство рассмотренной вертикальной косоугольной проекции, заключающееся в
сохранении параллельности вертикальных линий, иногда полезно, например, при изображении домов в архитектурных компьютерных системах. Сравните рис. 2. 22 (верх) и рис. 2.22 (низ). На нижнем рисунке вертикали изображаются вертикалями — дома не "разваливаются".
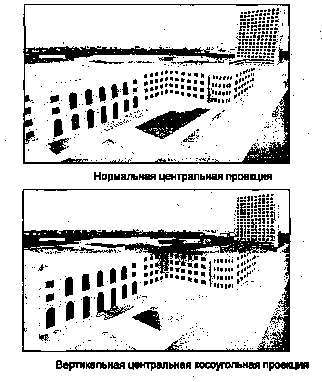
Рис. 2.21. Сравнение проекций
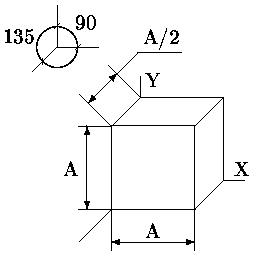
Кабинетная проекция (аксонометрическая косоугольная фронтальная диметрическая проекция)
Рис.
2.23.Кабинетная
проекция
Свободная проекция (аксонометрическая косоугольная горизонтальная изометрическая проекция)
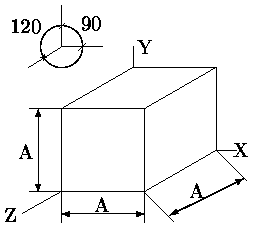
Рис. 2.24.Свободная проекция
Центральная проекция
Центральные проекции параллельных прямых, не параллельных плоскости
проекции, сходятся в точке схода.
В зависимости от числа координатных осей, которые пересекает плоскость
проекции, различаются одно, двух и трехточечные центральные проекции.
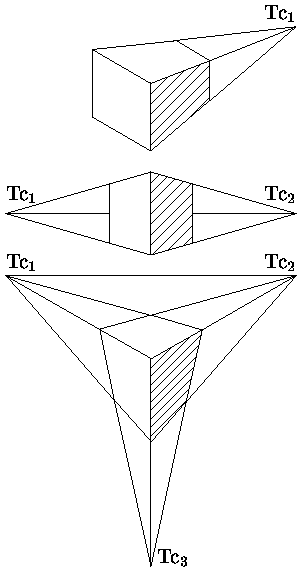
Рис. 2.25. Центральная проекция
Рассмотрим пример перспективной (центрально) проекции для вертикального расположения камеры, когда α = β = 0. Такую проекцию можно себе представить как изображение на стекле, через которое смотрит наблюдатель, расположенный сверху в точке (х, у, z) = (0, 0, zk). Здесь плоскость проецирования параллельна плоскости (х 0 у), как показано на рис. 2. 26.
Для произвольной точки пространства (Р), исходя из подобия треугольников,
запишем такие пропорции:
Xпр/(zk – zпл) = x/(zk – z) Yпр /(zk – zпл) = y/(zk – z)
Найдем координаты проекции, учитывая также координату Ζпр:
Запишем такие преобразования координат в функциональном виде
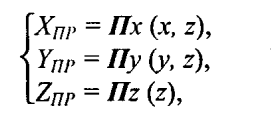
где Π — функция перспективного преобразования координат.
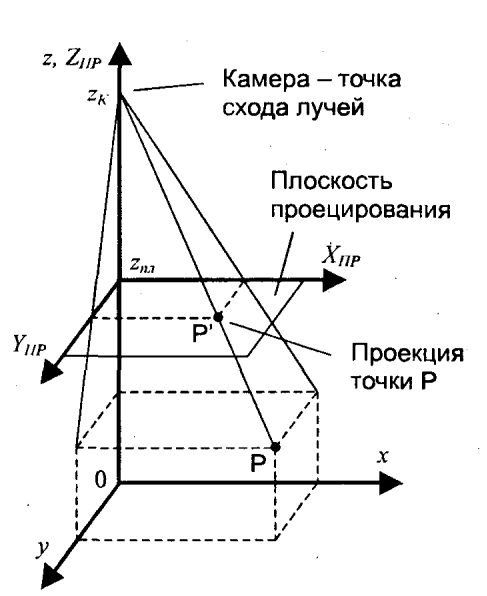
Рис. 2.26.Перпективная проекция
В матричной форме преобразования координат можно записать так:
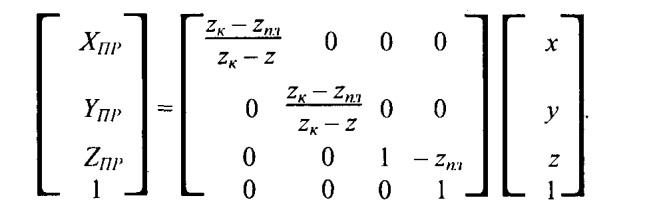
Обратите внимание на то, что здесь коэффициенты матрицы зависят от координаты z (в знаменателе дроби). Это означает, что преобразование координат — нелинейное (а точнее, дробно-линейное), оно относится к классу проективных преобразований.
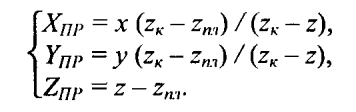
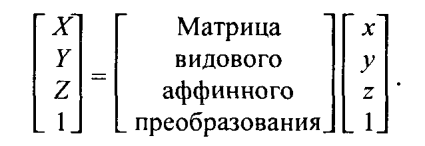
Мы получили формулы вычисления координат проекции для случая, когда точка схода лучей находится на оси z. Теперь рассмотрим общий случай. Введем видовую систему координат {X, Υ, Ζ), произвольно расположенную в трехмерном пространстве (х, у, z). Пусть точка схода находится на оси Ζ видовой системы координат, а направление обзора — вдоль оси Ζ противоположно ее направлению. Будем считать, что преобразование в видовые координаты описывается трехмерным аффинным преобразованием
После вычисления координат (X, Y, Z) можно вычислить координаты в плоскости проецирования в соответствии с формулами, уже рассмотренными нами ранее. Поскольку точка схода находится на оси Ζ видовых координат, то
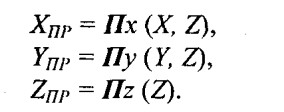
Последовательность преобразования координат можно описать так:
![]()
Такое преобразование координат позволяет моделировать расположения камеры в любой точке пространства и отображать в центре плоскости проецирования любые объекты обзора.
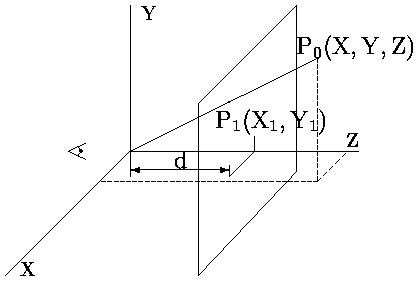
Рис. 2.27. Центральная проекция точки P0 в плоскость Z = d