

13.Ранг матрицы.Связь ранга с числом независимых строк.
Понятие ранга-одно из фундаментальных понятий лин.алгебры.
Рангом матрицы Am*n наз-ся наивысший порядок,отличных от нуля,миноров этой матрицы.
Свойства ранга:
1)Ранг нулевой матрицы равен 0-- r(0)=0;
2)Ранг не превосходит мини-го из пары чисел m и n:r(A)<=m;n {m;n};
3)Ранг квадр. мат.=n тогда,когда опред-ль /A/не равен 0; r(An)=n.
Теорема:элементарные преоб-я не меняют ранга матрицы.
Элементарные преоб-я:
1.Перестановка строк мат;
2.Прибавление к элем.одной строки соот. элем. другой строки умнож. на некоторое число;
Теорема:
Если строки(столбцы) линейнозависимы,то одно из них явл-ся линейной комбинацией другой.
Теорема о связи ранга мат.с число независимых строк:
Ранг матрицы равен числу её линейнонезависимых независимых строк.
14.Система лин. Ур-й.Элементарные преоб-я над системой.
Матричная запись сист.лин.ур-й.Понятие общего решения.
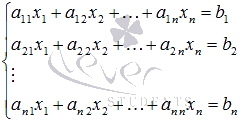
Система m-лин.ур-й относительно n-ур-й имеет вид:
{a11x1+a12x2+…+a1nxn=b1}
{a21x1+a22x2+…+a2nxn=b2}
…
{am1x1+am2x2+…+amnxn=bm}
Решением сист-наз-ся упоряд.совокупность чисел альфа1,альфа2…альфа n,которая при постановке в сист,каждое ур-е превращает в тождество.
При решении сист. ур-я варианты случая:
1)сист. ур-я имеет 1 решение(совместная);
2)сист.ур-я имеет бесконеч.множ.реш-й(совмест.и неопредел-ая);
3)сист.ур-й не имеет реш-й(несовместная);
Матричная запись:AX=B;
Над сист.ур-я допустимы след.преоб-я:
1)перестановка строк;
2)умнож.обеих частей ур-я на одно и тоже число;
3)вычерк-е нул-вой строки из мат. коэф-тов или ур-я с нул-ми коэф.
4)прибавление к обеим частям одного ур-я соот.частей другого ур-я,умнож. на некоторое число;
В результате преоб-й сист.ур-й,в сист. может появится ур-е вида:
0x1+0x2+…+0xn=0(тривиальное ур-е вычеркивается)
В результате преб-я:
0x1+0x2+…+0xn=и
Тогда ур-е наз-ся противоречивым;сист.,содержащая противоречивое ур-е реш-й не имеет,она не совместна.
15.Реш-е сист.лин.ур-й методом Гаусса.
Пусть дана сист. m лин. ур-й, относительно n:
{a11x1+a12x2+…+a1nxn=b1}
{a21x1+a22x2+…+a2nxn=b2}
(am1x1+am2x2+…+amnxn=bm}
Построим расширенную матрицу:
A р=(a11 a12…a1n/b1)
(a21 a22…a2n/b2)
(am1 am2..amn/bm)
Суть метода Гаусса:
С помощью элем.преоб-й ресшир-я.мат.сист.приводится к треуг-му виду,после привидения начинается обратный ход метода Гаусса.
16. Обратная матрица
Матрица A-1 - обратная для матрицы A, если AA-1=A-1A=I
Для квадратной матрицы A обратная существует тогда и только тогда, когда detA¹0.
где Aij - алгебраические дополнения элэментов aij матрицы A. Свойства: (A-1)-1=A, (AB)-1=B-1A-1, detA-1=1/detA
В частности:

Решение квадратной системы:
Ax=b
если |A|¹0, то x=A-1b
Матричные уравнения.
XA=B Þ X=BA-1
AX=B Þ X=A-1B
Пусть
система линейных алгебраических
уравнений задана в матричной форме
![]() где матрица A имеет размерность n на n и
ее определитель отличен от нуля.
где матрица A имеет размерность n на n и
ее определитель отличен от нуля.
Так
как
![]() , то матрица А – обратима, то есть,
существует обратная матрица
, то матрица А – обратима, то есть,
существует обратная матрица
![]() .
Если умножить обе части равенства
на
слева, то получим формулу для нахождения
матрицы столбца неизвестных переменных
.
Если умножить обе части равенства
на
слева, то получим формулу для нахождения
матрицы столбца неизвестных переменных
![]() .
.
17. Решение систем линейных уравнений методом Крамера.
Пусть нам требуется решить систему линейных алгебраических уравнений
в которой число уравнений равно числу неизвестных переменных и определитель основной матрицы системы отличен от нуля, то есть,
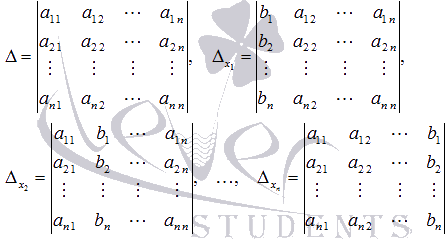
Пусть
![]() - определитель основной матрицы системы,
а
- определитель основной матрицы системы,
а
![]() -
определители матриц, которые получаются
из А заменой 1-ого, 2-ого, …, n-ого столбца
соответственно на столбец свободных
членов:
-
определители матриц, которые получаются
из А заменой 1-ого, 2-ого, …, n-ого столбца
соответственно на столбец свободных
членов:
При
таких обозначениях неизвестные переменные
вычисляются по формулам метода Крамера
как
 .
.
18. Теорема Кронекера – Капелли:
для того, чтобы система из p уравнений с n неизвестными была совместна необходимо и достаточно, чтобы ранг основной матрицы системы был равен рангу расширенной матрицы.
19. Однородные системы линейных уравнений
Однородная система линейных уравнений AX = 0 всегда совместна. Она имеет нетривиальные (ненулевые) решения, если r = rank A < n.
Для однородных систем базисные переменные (коэффициенты при которых образуют базисный минор) выражаются через свободные переменные соотношениями вида:
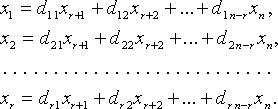
Тогда n - r линейно независимыми вектор-решениями будут:
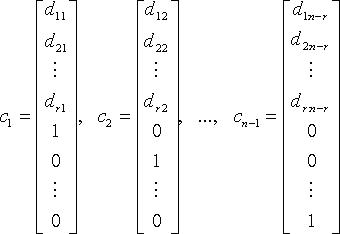
а
любое другое решение является их линейной
комбинацией. Вектор-решения
![]() образуют нормированную фундаментальную
систему.
образуют нормированную фундаментальную
систему.
В
линейном пространстве
![]() множество решений однородной системы
линейных уравнений образует подпространство
размерности n - r;
-
базис этого подпространства.
множество решений однородной системы
линейных уравнений образует подпространство
размерности n - r;
-
базис этого подпространства.
21. Модель Леонтьева многоотраслевой экономики.
Эффективное ведение народного хозяйства предалагает наличие
баланса между отдельными отраслями. Каждая отрасль при этом выступает двояко: с одной стороны, как производитель некоторой продукции, а с другой — как потребитель продуктов, вырабатываемых другими отраслями. Для наглядного выражения взаимной связи между отраслями пользуются определенного вида таблицами, называемыми таблицами межотраслевого баланса.
22.Определение линейного оператора. Пусть V и W — линейные пространства, размерности которых
равны соответственно n и m. Мы будем называть оператором А, действующим из V в W, отображение
вида А: V —> W, сопоставляющее каждому элементу х пространства V некоторый элемент у пространства
W. При этом будем использовать обозначение у = А (х) или у = Ах.
Свойства.
1°. λ(АВ) = (λА)В;
2°. (А + В)С = АС + ВС;
3°. А(В + С) = АВ + АС;
4°. (АВ)С = А(ВС).
24. Свойства собственных векторов и собственных значений.
Для собственных значений и собственных векторов линейного оператора справедливы следующие утверждения:
1) характеристический многочлен оператора, действующего в R n является многочленом n -й степени
относительно и не зависит от выбора базиса;
2) линейный оператор, действующий в R n имеет не более n различных собственных значений;
3) собственные векторы, отвечающие различным собственным значениям, линейно независимы.
25.Прямоугольные координаты точки на плоскости.
Прямоугольные (декартовы) координаты
точки на плоскости суть снабжённые знаками + или - расстояния
QM = ОР (= х — абсцисса) и РМ = OQ (= у — ордината) точки М от двух взаимно перпендикулярных прямых Ox и Оу (осей координат).
Расстояние между точками на плоскости.
Расстояние между заданными точками равно корню квадратному из суммы квадратов разностей одноимённых координат.
26.Уравнение линии плоскости.
Уравнение линии на плоскости — это уравнение, которому удовлетворяют координаты каждой точки данной линии и не удовлетворяют координаты любой точки, не лежащей на этой линии.
Алгебраические линии.
Алгебраической линией порядка n называют уравнение линии, представленное в виде многочлена n степени.
27.Уравнения прямой.
a x + b y = c (a2 + b2 ≠ 0). общее уравнение прямой
y = kx + b уравнение прямой с угловым коэффициентом k
y = y0 + k (x – x0) уравнение прямой с заданным угловым коэффициентом, проходящей через данную точку.
 прямая,
проходящая через две заданные точки.
прямая,
проходящая через две заданные точки.
![]() уравнение прямой
в отрезках
уравнение прямой
в отрезках