

Ответ: регулирование частоты вращения асинхронных двигателей и изменение направления вращения
Частота вращения асинхронного двигателя определяется формулой
(4.62)
n2 = n1(1 - s) = 60f1 (1 - s)/p,
из которой следуют три принципиально возможных метода регулирования асинхронных двигателей — изменение частоты f1 (частотное регулирование), числа полюсов 2р и скольжения s. Скольжение s обычно изменяют путем изменения потерь в цепи ротора с помощью реостата, но в некоторых случаях для этого изменяют величину питающего напряжения.
Частотное регулирование. Этот способ регулирования частоты вращения позволяет применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения, либо преобразователи частоты — электромашинные или статические, выполненные на управляемых полупроводниковых вентилях (тиристорах).
В настоящее время преобразователи частоты имеют довольно сложную схему и сравнительно высокую стоимость. Однако быстрое развитие силовой полупроводниковой техники позволяет надеяться на дальнейшее совершенствование преобразователей частоты, что открывает перспективы для широкого применения частотного регулирования. Подробное описание законов управления при частотном регулировании и анализ работы асинхронного двигателя при питании от преобразователя частоты даны в § 4.13 и 4.14.
Регулирование путем изменения числа полюсов. Такое регулирование позволяет получить ступенчатое изменение частоты вращения. На рис. 4.35 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в два раза. Для этого каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. Из рисунка видно, что при включении катушек 1-2 и 3-4 в две параллельные ветви число полюсов уменьшается в два раза, а следовательно, частота вращения магнитного поля увеличивается в два раза.
|
Рис. 4.35. Схема переключения одной фазы обмотки статора для изменения числа полюсов: а – при 2р = 4; б – при 2р = 2 |

При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но, так как частота вращения возрастает в два раза, ЭДС, индуцированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными.
На рис. 4.36 показаны наиболее часто употребляемые схемы соединений обмотки статора с переключением числа полюсов в отношении 2:1. Схемы, приведенные на рис. 4.36, а и б, обеспечивают переключение при постоянном моменте, а схемы, приведенные на рис. 4.36, в и г, - при приблизительно постоянной мощности.
|
Рис. 4.36. Принципиальные схемы соединения обмотки статора с переключением числа полюсов в отношении 2:1 и механические характеристики двигателей при таком переключении |
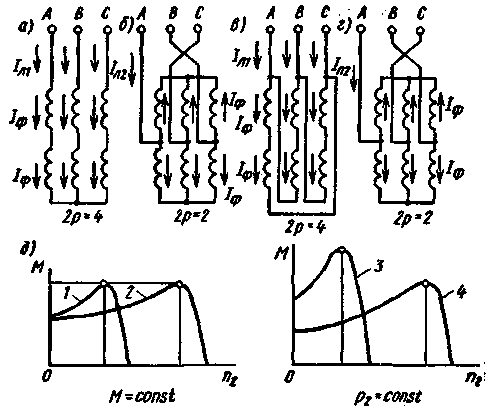
Рассмотрим отношение потребляемых мощностей P1 и моментов М для рассматриваемых схем при упрощенном предположении, что линейное напряжение Uл , ток Iф в каждой полуобмотке фазы статора, КПД η и cos φ остаются неизменными. При этом для схем, изображенных на рис. 4.36, а и б, имеем
(4.63)
|
} |
Для схем, изображенных на рис. 4.36, в и г, имеем
(4.64)
|
} |
В уравнениях (4.63) и (4.64) индексы «1» обозначают меньшую частоту вращения, а индексы «2» — большую частоту вращения.
При использовании схем, приведенных на рис. 4.36, в и г, обычно для обеих частот вращения указывают одинаковую мощность, т. е. принимают, что Р12 = Р11 и М2 = 0,5М1 . Механические характеристики двигателя при переключении полюсов двумя рассмотренными методами приведены на рис. 4.36, д, кривые 1 и 2 — при постоянном моменте, кривые 3 и 4 — при постоянной мощности.
Как видно из схем, приведенных на рис. 4.36, при переходе от меньшей частоты вращения к большей изменяется направление тока в половине полуобмоток фаз статора. Для того чтобы направление вращения поля при этом осталось неизменным, необходимо также переключить концы двух фаз обмотки (например, фазы В и С).
Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения реостата в цепь ротора. При включении в цепь ротора добавочных активных сопро-тивлений Rдоб1 , Rдоб2 , Rдоб3 и других изменяется форма зависимости М = f(s) и механической характеристики n2 = f(M) двигателя (рис. 4.37, а). При этом некоторому нагрузочному моменту Мн соответствуют скольжения s1 , s2 , s3 , ..., большие, чем скольжения se , при работе двигателя на естественной
|
Рис. 4.37. Изменение формы механической характеристики при регулировании частоты вращения с помощью добавочного активного сопротивления |
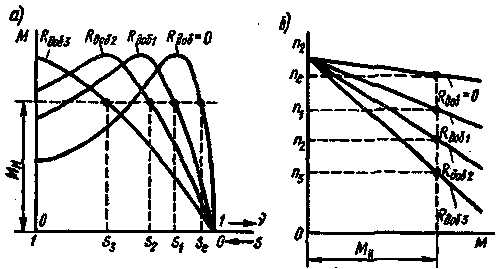
характеристике (при Rдоб = 0). Следовательно, установившаяся частота вращения двигателя уменьшается от nе до п1 п2, п3,... (рис. 4.37,б).
|
Рис. 4.38. Изменение формы механической характеристики при регулировании частоты вращения путем изменения питающего напряжения |

Этот метод регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются: а) большие потери энергии в регулировочном реостате; б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлении в цепи ротора. В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения.
Регулирование путем изменения величины питающего напряжения. Для двигателей нормального исполнения такое регулирование неприменимо, так как при уменьшении питающего напряжения резко уменьшается максимальный момент Мmax (рис. 4.38, кривые 1, 2 и 3). Критическое скольжение, определяющее зону устойчивой работы двигателя, остается при этом неизменным: sкp = 0,1 ÷ 0,2. Принципиально рассматриваемый метод можно было бы использовать для регулирования двигателей с большим активным сопротивлением ротора, так как в этом случае скольжение s'кp резко возрастает и максимум момента сдвигается в зону, близкую к s = 1 (кривые 1', 2' и 3'), и даже в область, где s > 1. Однако это ведет к значительному увеличению потерь мощности и снижению КПД, поэтому такой метод регулирования частоты вращения можно
|
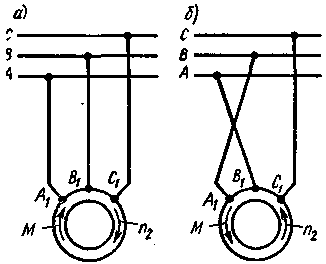
Рис. 4.39. Схемы включения двигателя при изменении направления вращения |
применять только в микродвигателях, для которых величина КПД не имеет решающего значения.
Изменение направления вращения. Для изменения направления вращения ротора электродвигателя надо изменить направление вращения магнитного поля. Как следует из § 3.4, для этого необходимо изменить порядок чередования тока в фазах обмотки статора. В трехфазных машинах это осуществляется путем переключения двух любых проводов, подводящих ток из трехфазной сети к фазам этой обмотки (рис. 4.39, а и 6).
Торможение.
орможение асинхронного двигателя можно осуществлять следующими способами:
– Торможение противовключением.
Переключают две фазы на обмотке статора, и магнитное поле начинает вращаться в обратную сторону, при этом ротор будет тормозиться. Недостаток: сильный нагрев электродвигателя.
– Динамическое торможение. Две фазы статора включают на питание постоянным током, поле неподвижно. Магнитное поле перестает вращаться и ротор тормозит. Менее интенсивный, чем в первом случае, но меньше нагрев.
– Рекуперативное торможение. Применяется, если скорость вращения двигателя регулируется переключением числа пар полюсов. Переключают с повышенной частоты на пониженную. Торможение происходит не до полной остановки, то есть необходимо применить еще один из способов торможения.
– Конденсаторное торможение. Применяется для двигателей мощностью до 2-х кВт. Параллельно статору подключают конденсаторы, обычно соединенные треугольником. При отключении от сети конденсаторы обеспечивают питание обмотки статора реактивным током, частота которого обусловлена ёмкостью конденсатора и индуктивностью обмоток статора. Частота вращения магнитного поля определяется частотой реактивного тока. При угловой скорости ротора, превышающей угловую скорость поля, асинхронный двигатель начинает работать в генераторном режиме с самовозбуждением, при этом развивается тормозной момент. Когда частота вращения ротора уменьшается до частоты вращения магнитного поля, торможение прекратится, однако за это время поглощается большая часть кинетической энергии. Если после конденсаторного торможения статора асинхронный двигатель замкнуть накоротко, то в обмотках статора появляются токи, созданные затухающим полем и происходит процесс кратковременного динамического торможения.
– Двухтоковое торможение. Через обмотки статора одновременно включают постоянный и переменный ток, то есть совмещают динамическое торможение и торможение противовключением. Очень эффективный способ. Если асинхронный двигатель не отключить, то он реверсируется и будет вращаться в обратную сторону с очень малой скоростью.
34. Устройство, принцип действия и характеристики синхронного двигателя.
Ответ:
Синхронный двигатель не имеет принципиальных конструктивных отличий от синхронного генератора. Так же как и в генераторе, на статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого
![]()
На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Ток возбуждения создает магнитный поток полюсов. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Основным достоинством синхронных двигателей является возможность их работы с потреблением опережающего тока, т. е. двигатель может представлять собой емкостную нагрузку для сети. Такой двигатель повышает соз всего предприятия, компенсируя реактивную мощность других приемников энергии.
Так же как и в генераторах, в синхронных двигателях изменение реактивной мощности, т. е. изменение соs , достигается регулированием тока возбуждения. При некотором токе возбуждения, соответствующем нормальному возбуждению, соs=1. Уменьшение тока возбуждения вызывает появление отстающего (индуктивного) тока в статоре, а при увеличении тока возбуждения (перевозбужденный двигатель) — опережающего (емкостного) тока в статоре.
Достоинством синхронных двигателей является также меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных— квадрату напряжения.
Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный Поток поля статора.
Синхронные двигатели выполняют преимущественно с явно Сраженными полюсами, и работают они в нормальном режиме при опережающем соs =0,8. Возбуждение синхронные двигатели получают либо от возбудителя, либо от сети переменного тока через полупроводниковые выпрямители.
Пуск в ход синхронного двигателя непосредственным включением его в сеть невозможен, так как при включении обмотки статора в сеть создается вращающееся магнитное поле, а ротор в момент включения неподвижен, и следовательно, взаимодействия магнитных полей статора и ротора нет, т. е. двигатель не развивает вращающего момента. Поэтому для пуска в ход двигателя необходимо предварительно увеличить число оборотов ротора его до синхронной скорости или близкой к ней.
В настоящее время исключительное применение имеет так называемый асинхронный пуск синхронных двигателей, сущность которого заключается в следующем. В полюсных наконечниках ротора синхронного двигателя укладывается пусковая обмотка, выполненная в виде беличьего колеса, наподобие короткозамкнутой обмотки ротора асинхронной машины.
Обмотка статора двигателя включается в трехфазную сеть, и пуск его производится так же, как и пуск асинхронных двигателей с короткозамкнутым ротором.
После того как двигатель разовьет скорость, близкую к синхронной (примерно 95%), обмотка возбуждения включается в сеть постоянного тока и двигатель входит в синхронизм, т. е. скорость ротора увеличивается до синхронной.
При пуске в ход двигателя обмотка возбуждения замыкается на сопротивление, примерно в 10—12 раз большее сопротивления самой обмотки. Нельзя обмотку возбуждения при пуске в ход оставить разомкнутой или замкнуть накоротко. Если при пуске в ход обмотка возбуждения окажется разомкнутой, то в ней будет индуктироваться очень большая э. д. с, опасная как для изоляции обмотки, так и для обслуживающего персонала. Создание э. д. с. большой величины объясняется тем, что при пуске в ход поле статора вращается с большой скоростью относительно неподвижного ротора и с большой скоростью пересекает проводники обмотки возбуждения, имеющей большое число витков.
Если обмотку возбуждения замкнуть накоротко при пуске в ход, то двигатель при пуске под нагрузкой может развить скорость, близкую к половине синхронной, и войти в синхронизм не сможет.
Работа синхронной машины с потреблением из сети опережающего тока дает возможность использовать ее в качестве компенсатора. Как выше было отмечено, синхронный двигатель для сети может являться конденсатором и повышать соs всей энергоустановки, компенсируя реактивную мощность других приемников энергии.
Повышение соs снижает потребление реактивной мощности электроустановок предприятия и уменьшает стоимость электроэнергии.
Компенсатором является синхронный двигатель, работающий без нагрузки и предназначенный для повышения соs предприятия. Таким образом, компенсатор является генератором реактивной мощности.
Конструктивно компенсатор отличается от синхронного двигателя незначительно. Компенсатор не несет механической нагрузки, поэтому его вал и ротор легче, а воздушный зазор меньше, чем у двигателя.
Основным недостатком синхронных двигателей является потребность в источнике как переменного, так и постоянного тока.
Потребность в источнике постоянного тока для питания обмотки возбуждения синхронного двигателя делает его крайне неэкономичным при небольших мощностях. Поэтому при малых мощностях синхронные двигатели с возбуждением постоянным током не находят применения.
При малых мощностях в случае необходимости получения постоянства скорости вращения (в устройствах автоматики, телемеханики, звукового кино и т. и.) широко используют реактивные синхронные двигатели.
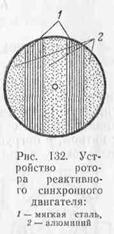
Ротор реактивного синхронного двигателя имеет явно выраженные полюса. При очень малых мощностях ротор делают цилиндрическим из алюминия, в который при отливке закладываются стержни из мягкой стали, выполняющие функцию явно выраженных полюсов (рис. 132). Цилиндрическая форма ротора упрощает его обработку и балансировку, а также снижает потери на трение о воздух при работе машины, что существенно для двигателей очень малых мощностей.
В реактивных синхронных двигателях вращающий момент создается в результате стремления ротора ориентироваться в магнитном поле таким образом, чтобы магнитное сопротивление для этого поля было наименьшим. Поэтому ротор будет всегда занимать такое положение в пространстве, при котором магнитные линии вращающегося магнитного поля статора замкнутся через сталь ротора, так что он будет вращаться вместе с магнитным полем статора.
Наряду с трехфазным широко используют и однофазные реактивные двигатели.
35. Полупроводниковые приборы на основе кремния и германия.
ОТВЕТ:
Полупроводники составляют обширную область материалов, отличающихся друг от друга большим многообразием электрических и физических свойств, а также большим многообразием химического состава, что и определяет различные назначения при их техническом использовании.
По химической природе современные полупроводниковые материалы можно разделить на следующие четыре главные группы:
1. Кристаллические полупроводниковые материалы, построенные из атомов или молекул одного элемента. Такими материалами являются широко используемые в данное время германий, кремний, селен, бор, карбид кремния и др.
2. Окисные кристаллические полупроводниковые материалы, т. е. материалы из окислов металлов. Главные из них: закись меди, окись цинка, окись кадмия, двуокись титана, окись никеля и др. В эту же группу входят материалы, изготовляемые на основе титаната бария, стронция, цинка, и другие неорганические соединения с различными малыми добавками.
3. Кристаллические полупроводниковые материалы на основе соединений атомов третьей и пятой групп системы элементов Менделеева. Примерами таких материалов являются антимониды индия, галлия и алюминия, т. е. соединения сурьмы с индием, галлием и алюминием. Они получили наименование интерметаллических соединений.
4. Кристаллические полупроводниковые материалы на основе соединений серы, селена и теллура с одной стороны и меди, кадмия и свинца с другой. Такие соединения называются соответственно: сульфидами, селенидами и теллуридами.
В![]() се
полупроводниковые материалы, как уже
говорилось, могут быть распределены по
кристаллической структуре на две группы.
Одни материалы изготовляются в виде
больших одиночных кристаллов
(монокристаллов), из которых вырезают
по определенным кристаллическим
направлениям пластинки различных
размеров для использования их в
выпрямителях, усилителях, фотоэлементах.
се
полупроводниковые материалы, как уже
говорилось, могут быть распределены по
кристаллической структуре на две группы.
Одни материалы изготовляются в виде
больших одиночных кристаллов
(монокристаллов), из которых вырезают
по определенным кристаллическим
направлениям пластинки различных
размеров для использования их в
выпрямителях, усилителях, фотоэлементах.
Такие материалы составляют группу монокристаллических полупроводников. Наиболее распространенными монокристаллическими материалами являются германий и кремний. Разработаны методы изготовления монокристаллов и из карбида кремния, монокристаллы из интерметаллических соединений.
Другие полупроводниковые материалы представляют собой смесь множества малых кристалликов, беспорядочно спаянных друг с другом. Такие материалы называются поликристаллическими. Представителями поликристаллических полупроводниковых материалов являются селен и карбид кремния, а также материалы, изготовляемые из различных окислов методами керамической технологии.
Рассмотрим широко применяемые полупроводниковые материалы.
Германий- элемент четвертой группы периодической системы элементов Менделеева. Германий имеет ярко-серебристый цвет. Температура плавления германия 937,2° С. В природе он встречается часто, но в весьма малых количествах. Присутствие германия обнаружено в цинковых рудах и в золах разных углей. Основным источником получения германия является зола углей и отходы металлургических заводов.

Рис. 1. Германий
Полученный в результате ряда химических операций слиток германия еще не представляет собой вещества, пригодного для изготовления из него полупроводниковых приборов. Он содержит нерастворимые примеси, не является еще монокристаллом и в него не введена легирующая примесь, обусловливающая необходимый вид электропроводности.
Для очистки слитка от нерастворимых примесей широко применяется метод зонной плавки. Этим методом могут быть удалены лишь те примеси, которые различно растворяются в данном твердом полупроводнике и в его расплаве.
Германий обладает большой твердостью, но чрезвычайно хрупок и раскалывается на мелкие куски при ударах. Однако при помощи алмазной пилы или других устройств его можно распилить на тонкие пластинки. Отечественной промышленностью изготовляется легированный германий с электронной электропроводностью различных марок с удельным сопротивлением от 0,003 до 45 ом х см и германий легированный с дырочной электропроводностью с удельным сопротивлением от 0,4 до 5,5 ом х см и выше. Удельное же сопротивление чистого германия при комнатной температуре ρ = 60 ом х см.
Германий как полупроводниковый материал широко используется не только для диодов и триодов, из него изготовляются мощныевыпрямители на большие токи, различные датчики, применяемые для измерения напряженности магнитного поля, термометры сопротивления для низких температур и др.
Кремний широко распространен в природе. Он, как и германий, является элементом четвертой группы системы элементов Менделеева и имеет такую же кристаллическую (кубическую) структуру. Полированный кремний приобретает металлический блеск стали.

Рис. 2. Кремний
Как и германий, кремний обладает хрупкостью. Его температура плавления значительно выше, чем у германия: 1423° С. Удельное сопротивление чистого кремния при комнатной температуре ρ = 3 х 105 ом-см.
Так как температура плавления кремния значительно выше, чем у германия, то тигель из графита заменяют кварцевым, так как графит при высокой температуре может реагировать с кремнием и образовывать карбид кремния. Кроме того, в расплавленный кремний могут попасть из графита загрязняющие примеси.
Промышленностью выпускается полупроводниковый легированный кремний с электронной электропроводностью (различных марок) с удельным сопротивлением от 0,01 до 35 ом х см и с дырочной электропроводностью тоже различных марок с удельным сопротивлением от 0,05 до 35 ом х см.
Кремний, как и германий, широко применяется для изготовления многочисленных полупроводниковых приборов. В кремниевом выпрямителе достигаются более высокие обратные напряжения и рабочая температура (130 - 180°С), чем в германиевых выпрямителях (80°С). Из кремния изготовляют точечные и плоскостные диоды и триоды, фотоэлементы и другие полупроводниковые приборы.
На рис. 3 показаны зависимости величин удельного сопротивления германия и кремния обоих типов от концентрации легирующих примесей в них.

Рис. 3. Влияние концентрации примесей на величину удельного сопротивления германия и кремния при комнатной температуре: 1 - кремний, 2 - германий
Кривые на рисунке показывают, что легирующие примеси оказывают огромное влияние на величину удельного сопротивления: у германия оно изменяется о г величины собственного сопротивления 60 ом х см до 10-4 ом х см, т. е. в 5 х 105 раз, а у кремния с 3 х 103 до 10-4 ом х см, т. е. в 3 х 109 раз.
В качестве материала для изготовления нелинейных сопротивлений особенно широкое применение получил поликристаллический материал - карбид кремния.
Рис. 4. Карбид кремния
Из карбида кремния изготовляют вентильные разрядники для линий электропередачи — устройства, защищающие линию электропередачи от перенапряжений. В них диски из нелинейного полупроводника (карбида кремния) пропускают ток на землю под действием волн перенапряжений, возникающих в линии. В результате этого восстанавливается нормальная работа линии. При рабочем же напряжении линии сопротивления этих дисков возрастают и ток утечки с линии на землю прекращается.
Карбид кремния получают искусственно - путем тепловой обработки смеси кварцевого песка с углем при высокой температуре (2000°С).
В зависимости от введенных легирующих примесей образуются два основных вида карбида кремния: зеленый и черный. Они отличаются друг, от друга по типу электропроводности, а именно: зеленый карбид кремния обкидает электропроводностью n-типа, а черный — электропроводностью р-типа.
Для вентильных разрядников из карбида кремния изготовляются диски диаметром от 55 до 150 мм и высотой от 20 до 60 мм. В вентильном разряднике диски из карбида кремния соединяются последовательно друг с другом и с искровыми промежутками. Система, состоящая из дисков и искровых промежутков, сжимается спиральной пружиной. С помощью болта разрядник присоединяется к проводу линии электропередачи, а c другой стороны разрядник соединяется проводом с землей. Все детали разрядника помещены в фарфоровый корпус.
При нормальном напряжении на линии передачи ток с линии вентиль не пропускает. При повышенных же напряжениях (перенапряжениях), создаваемых атмосферным электричеством, или внутренних перенапряжениях искровые промежутки пробиваются и диски вентиля окажутся под высоким напряжением.
Сопротивление их резко упадет, что обеспечит утечку тока с линии на землю. Прошедший большой ток снизит напряжение до нормального и в дисках вентиля сопротивление возрастет. Вентиль окажется запертым, т. е. рабочий ток линии им пропускаться не будет.
Карбид кремния находит еще применение в полупроводниковых выпрямителях, работающих при больших рабочих температурах (до 500°С).
36. Типы, свойства и назначение диодов.
ОТВЕТ:
Полупроводниковые диоды: назначение, классификация, маркировка и обозначение в схемах |
|
|
Полупроводниковый диод — это полупроводниковый прибор с одним выпрямляющим электрическим переходом и двумя выводами, в котором используется то или иное свойство электрического перехода (незначительная коррекция данного определения может понадобиться лишь для очень узкого круга приборов, например, для некоторых диодов СВЧ и прецизионных стабилитронов). К противоположным областям выпрямляющего электрического перехода привариваются или припаиваются металлические выводы, и вся система заключается в металлический, металлокерамический, стеклянный или пластмассовый корпус. Область полупроводникового кристалла диода, имеющая более высокую концентрацию примесей (следовательно, и основных носителей заряда), называется эмиттером, а другая, с меньшей концентрацией, — базой. По аналогии с электровакуумными диодами, ту сторону диода, к которой при прямом включении подключается отрицательный полюс источника питания, часто называют катодом, а другую — анодом. В зависимости от области применения полупроводниковые диоды делят на следующие основные группы:
По конструктивному исполнению полупроводниковые диоды делятся на плоскостные и точечные, а по технологии изготовления на сплавные, диффузионные и эпитаксиальные (следует понимать, что существует множество разных подвидов этих технологий). В плоскостных диодах электрический переход имеет линейные размеры значительно большие толщины самого перехода. К точечным относят диоды, у которых размеры электрического перехода, определяющие его площадь, меньше толщины области объемного заряда. Такой диод образуется, например, в месте контакта небольшой пластины полупроводника и острия металлической пружины (точечно-контактные диоды). В технологии изготовления диодов определяющей является методика внесения примесей в полупроводник, а также способ соединения кристалла полупроводника с металлическими контактами. Существует большое количество возможных форм исполнения самых разнообразных переходов, которые обладают множеством разнообразных свойств. Эти свойства могут использоваться для создания полупроводниковых диодов различного принципа действия и конструкции. Многие из таких диодов имеют свои исторически-сложившиеся названия, которые могут характеризовать конструкцию диода, физический эффект, определяющий характеристики диода, и т.д. (лавинно-пролетные диоды, туннельные диоды, диоды Шоттки, диоды Ганна, варакторы, диоды с накоплением заряда, ...).Часто эти группы диодов отличаются областью применения и/или маркировкой. |
37. Свойство и назначение тиристоров и симмисторов.
ОТВЕТ: