

Метод кинетостатики для материальной точки.
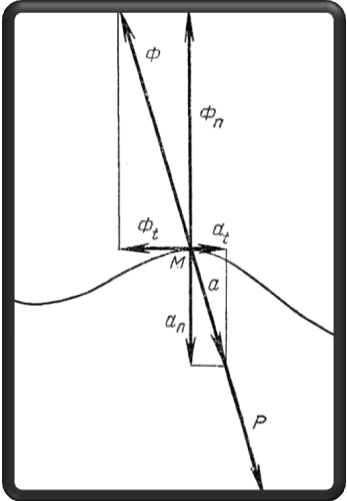
Несвободная точка М движется по траектории под действием сил. Равнодействующая сила Р равна геометрической сумме активной силы Ракт и реакции связи R.
Перепишем основное уравнение динамики: mа=Ракт+R(1) в виде Ракт+R-ma=0.
mа —вектор, модуль которого имеет одинаковую размерность с силой. Этот вектор можно рассматривать как некоторую силу, не приложенную к точке М. Обозначим его Ф = - mа (3)
Эта сила получила название - сила инерции материальной точки. Силой инерции материальной точки называется вектор по модулю, равный произведению массы точки на модуль ускорения, направленный противоположно ускорению.
Ракт+R=Ф=0 (4)
Уравнение (4) называется уравнением кинетостатики для несвободной, т. е. находящейся под действием связей, материальной точки.
 Сила
инерции приложена не к данной точке М,
а к телу, действующему на точку М и
сообщающему ей ускорение.
Сила
инерции приложена не к данной точке М,
а к телу, действующему на точку М и
сообщающему ей ускорение.
Введение вектора Ф позволяет установить новый метод решения задач.динамики—метод кинетостатики.
Решением задач динамики сводится к решению статической задачи, т.е. решению по форме, а не по существу, так как дано движение, а не равновесие.Составляющие силы Ф по касательной и нормали к траектории называются соответственно касательной (или тангенциальной) инормальной (или центробежной) силами инерции.
Их модули определяются из формул:
![]()
![]()
где р — радиус кривизны траектории.
Если движущаяся точка принадлежит вращающемуся вокруг неподвижной оси твердому телу, то:
![]()
![]() где
h—расстояние
от точки до оси вращения.
где
h—расстояние
от точки до оси вращения.
Работа постоянной силы на прямолинейном участке цепи.
Д ана
постоянная по модулю и направлению сила
Р, точка М приложения которой перемещается
прямолинейно из М1 в M2.
ана
постоянная по модулю и направлению сила
Р, точка М приложения которой перемещается
прямолинейно из М1 в M2.
Работой А постоянной силы Р на прямолинейном перемещении называется произведение модуля силы на перемещение и на косинус угла между силой и скоростью перемещению точки
A = P s cosα (1) ,где s = М1М2— перемещение точки М;
а — угол между силой Р и скоростью V.
Уравнение (1) можно рассматривать в нескольких случаях:
Угол α острый, т.е. ˂900 =>cosα>0 и А>0;
1800<α˂900 => A<0;
Частные случаи: α = 00 =>AMAX=PS;
α = 900 =>A=0;
α = 1800 =>AMIN= - PS;
Единицы работы.
В международной системе:
A = 1 джоуль (дж)— это работа, совершенная силой в 1 ньютон на перемещении, совпадающем с направлением силы, равном 1 метру,
1 дж= 1 н*1 м
В технической системе:
1 килограммометр (кг*м) — работа, совершенная силой в 1 килограмм на перемещении вдоль ее линии действия, равном 1 метру,
1 кГ*м =1 кГ*1 м
кГ*м =9,81 дж
Работа переменной силы на криволинейном пути.
 Разобьем
дугу М1М2
на большое число n
весьма малых дуг, длины которых обозначим
соответственно ∆S1,
∆S2…
∆SI…
∆Sn.
Приложенных к точки М со скоростью υI.
Сила, которая будет действовать в данный
момент, займет некоторую силу РI.
Угол между скоростью υI
и силой РI
- αI.
Будем считать РI
постоянной (по модулю и направлению) на
перемещении, равном ∆SI.
При этом условии можно найти работу
силы Pi
. Ее принято называть элементарной.
Разобьем
дугу М1М2
на большое число n
весьма малых дуг, длины которых обозначим
соответственно ∆S1,
∆S2…
∆SI…
∆Sn.
Приложенных к точки М со скоростью υI.
Сила, которая будет действовать в данный
момент, займет некоторую силу РI.
Угол между скоростью υI
и силой РI
- αI.
Будем считать РI
постоянной (по модулю и направлению) на
перемещении, равном ∆SI.
При этом условии можно найти работу
силы Pi
. Ее принято называть элементарной.
Элементарной работой силы РI на перемещении ∆SI- называется произведение δАI =РI ∆SI cosαI (1)
Работой силы Р из М1 в М2 называется предел суммы элементарных работ при условии, что n—> ∞,а ∆SI—> 0, то А = lim∑ РI ∆SIcosαI (2)