

http://schools.keldysh.ru/sch764/files/t1.htm#
http://www.terver.ru/phisycs.php - справочник
1) http://elmehanika.elsu.ru/section/kinematics.html
http://csfm.marstu.net/elearning/Nurgaliev/text/1.3.html
I. Механика. Общие понятия
Механика
- раздел физики, который рассматривает
простейшую форму движения материи
- механическое движение.
Под
механическим движением понимают
изменение положения изучаемого тела в
пространстве со временем относительно
некоторого гола или системы тел,
условно считаемых неподвижными. Такую
систему тел вместе с часами, в качестве
которых может быть выбран любой
периодический процесс, называют системой
отсчета (С.О.). С.О. часто выбирают из
соображений удобства.
Для
математического описания движения с
С.О. связывают систему координат,
часто прямоугольную.
Простейшее
тело в механике - материальная точка.
Это тело, размерами которого в условиях
денной задачи можно пренебречь.
Всякое
тело, размерами которого пренебречь
нельзя, рассматривают как систему
материальных точек.
Механика
подразделяется на кинематику,
которая занимается геометрическим
описанием движения, не изучая его причин,
динамику, которая изучает законы
движения тел под действием сил, и статику,
которая изучает условия равновесия
тел.
2. Кинематика точки
Кинематика
изучает пространственно-временное
перемещение тел. Она оперирует такими
понятиями, как перемещение
![]() ,
путь
,
путь![]() ,
время t , скорость движения
,
время t , скорость движения
![]() ,
ускорение
,
ускорение
![]() .
Линию,
которую описывает при своем движении
материальная точка, называют траекторией.
По форме траектории движения делятся
на прямолинейные и криволинейные. Вектор
,
соединяющий начальную I и конечную
2 точки, называют перемещением (рис.
I.I).
Каждому моменту времени t
соответствует свой радиус-вектор
.
Линию,
которую описывает при своем движении
материальная точка, называют траекторией.
По форме траектории движения делятся
на прямолинейные и криволинейные. Вектор
,
соединяющий начальную I и конечную
2 точки, называют перемещением (рис.
I.I).
Каждому моменту времени t
соответствует свой радиус-вектор![]() :
:
![]() Т
Т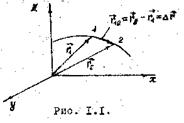 аким
образом движение точки может быть
описано векторной функцией.
аким
образом движение точки может быть
описано векторной функцией.
![]() которая
определяем векторный способ задания
движения, или тремя скалярными
функциями
x=
x(
t);
y=
y(
t);
z=
z(
t) ,
(1.2)
которые называют кинематическими
уравнениями. Они определяют задание
движения координатным способом.
Движение
точки будет также определено, если для
каждого момента времени будет установлено
положение точки на траектории, т.е.
зависимость
которая
определяем векторный способ задания
движения, или тремя скалярными
функциями
x=
x(
t);
y=
y(
t);
z=
z(
t) ,
(1.2)
которые называют кинематическими
уравнениями. Они определяют задание
движения координатным способом.
Движение
точки будет также определено, если для
каждого момента времени будет установлено
положение точки на траектории, т.е.
зависимость
![]() (1.3)
Она определяет задание движения
естественным способом.
Каждая
из указанных формул представляет собой
закон движения точки.
3.
Скорость
Если моменту времени t1
соответствует радиус-вектор
(1.3)
Она определяет задание движения
естественным способом.
Каждая
из указанных формул представляет собой
закон движения точки.
3.
Скорость
Если моменту времени t1
соответствует радиус-вектор
![]() ,
а
,
а
![]() ,
то за промежуток
,
то за промежуток
![]() тело
получит перемещение
тело
получит перемещение
![]() .
В этом случае средней скоростью
.
В этом случае средней скоростью ![]() за
Dt называют величину
за
Dt называют величину
![]() ,
(1.4)
которая по отношению к траектории
представляет секущую, проходящую
через точки I и 2. Скоростью в момент
времени t называют
вектор
,
(1.4)
которая по отношению к траектории
представляет секущую, проходящую
через точки I и 2. Скоростью в момент
времени t называют
вектор
![]() ,
(1.5)
Из этого определения следует,
что скорость в каждой точке траектории
направлена по касательной к ней. Из
(1.5) следует, что проекции и модуль вектора
скорости определятся
выражениями:
,
(1.5)
Из этого определения следует,
что скорость в каждой точке траектории
направлена по касательной к ней. Из
(1.5) следует, что проекции и модуль вектора
скорости определятся
выражениями:
![]() ,
(1.6)
Если задан закон движения
(1.3), то модуль вектора скорости определится
так:
,
(1.6)
Если задан закон движения
(1.3), то модуль вектора скорости определится
так:
 ,
(1.7)
Таким образом, зная закон движения
(I.I), (1.2), (1.3), можно вычислить вектор и
модуль доктора скорости и, наоборот,
зная скорость из формул (1.6), (1.7), можно
вычислять координаты и путь.
4.
Ускорение
При произвольном движении
вектор скорости непрерывно меняется.
Величина, характеризующая быстроту
изменения вектора скорости, называется
ускорением
.
Если
в. момент времениt1скорость точки
,
(1.7)
Таким образом, зная закон движения
(I.I), (1.2), (1.3), можно вычислить вектор и
модуль доктора скорости и, наоборот,
зная скорость из формул (1.6), (1.7), можно
вычислять координаты и путь.
4.
Ускорение
При произвольном движении
вектор скорости непрерывно меняется.
Величина, характеризующая быстроту
изменения вектора скорости, называется
ускорением
.
Если
в. момент времениt1скорость точки
![]() ,а
приt2 -
,а
приt2 -
![]() ,
то приращение скорости составит
,
то приращение скорости составит
![]() (Рис.1.2).
Среднее ускорение п
(Рис.1.2).
Среднее ускорение п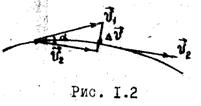 ри
этом
ри
этом
![]() ,
(1.8)
а
мгновенное
,
(1.8)
а
мгновенное
![]() ,
(1.9)
Для
проекции и модуля ускорений имеем:
,
(1.9)
Для
проекции и модуля ускорений имеем:
![]() ,
(1.10)
Если задан естественный способ
движения, то ускорение можно определить
и так. Скорость меняется по величине и
по направлению, приращение
скорости
,
(1.10)
Если задан естественный способ
движения, то ускорение можно определить
и так. Скорость меняется по величине и
по направлению, приращение
скорости![]() раскладывают
на две величины;
раскладывают
на две величины;![]() -
направленный вдоль
(приращение
скорости по величине) и
-
направленный вдоль
(приращение
скорости по величине) и
![]() -
направленный перпендикулярно
(приращение.
скорости по направлению), т.е.
=
+
(Рис.I.З). Из (1.9) получаем:
-
направленный перпендикулярно
(приращение.
скорости по направлению), т.е.
=
+
(Рис.I.З). Из (1.9) получаем:
![]() (1.11);
(1.11);
![]() (1.12)
(1.12)
|

Тангенциальное (касательное) ускорение
характеризует быстроту изменения
по
величине
![]() (1.13)
нормальное
(центростремительное ускорение)
характеризует быстроту изменения по
направлению. Для вычисления a
n
рассмотрим
DOMN и DMPQ при условии
малого перемещения точки по траектории.
Из подобия этих треугольников находим
PQ:MP=MN:OM :
(1.13)
нормальное
(центростремительное ускорение)
характеризует быстроту изменения по
направлению. Для вычисления a
n
рассмотрим
DOMN и DMPQ при условии
малого перемещения точки по траектории.
Из подобия этих треугольников находим
PQ:MP=MN:OM :
![]() ,
(1.14)
Полное ускорение в этом случае
определится так:
,
(1.14)
Полное ускорение в этом случае
определится так:
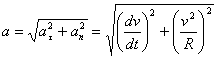 ,
(1.15)
5. Примеры
I. Равнопеременное
прямолинейное движение. Это движение
с постоянным ускорением(
,
(1.15)
5. Примеры
I. Равнопеременное
прямолинейное движение. Это движение
с постоянным ускорением(![]() )
. Из (1.8) находим
)
. Из (1.8) находим
![]() или
или
![]() ,
где v0 - скорость в момент
времениt0 . Полагая t0=0,
находим
,
где v0 - скорость в момент
времениt0 . Полагая t0=0,
находим
![]() ,
а пройденный путь S из формулы
(I.7):
,
а пройденный путь S из формулы
(I.7):
![]() гдеS0
- постоянная, определяемая из начальных
условий.
2. Равномерное движение
по окружности. В этом случае скорость
меняется только по направлению, то есть
гдеS0
- постоянная, определяемая из начальных
условий.
2. Равномерное движение
по окружности. В этом случае скорость
меняется только по направлению, то есть
![]() -
центростремительное ускорение.
-
центростремительное ускорение.
2) Первый закон Ньютона (закон инерции): всякое тело сохраняет состояние покоя или равномерного прямолинейного движения, пока воздействие других тел не выведет его из этого состояния. Стремление тела сохранять состояние покоя или равномерного прямолинейного движения называется инертностью. Поэтому первый закон Ньютона называют также законом инерции. Инерциальной системой отсчета является такая система отсчета, относительно которой материальная точка, свободная от внешних воздействий, либо покоится, либо движется равномерно и прямолинейно. Первый закон Ньютона утверждает существование инерциальных систем отсчета.
Второй закон Ньютона: изменение движения пропорционально приложенной силе и происходит в том направлении, в каком действует сила.
Сила – это физическая величина,
характеризующая взаимодействие тел, в
результате которого тела приобретают
ускорения или деформируются [F]=[Н]=[![]() ].
].
Но разные тела под влиянием одинаковых сил приобретают разные ускорения, следовательно, ускорение зависит не только от силы, но и от собственных свойств тел. Это свойство называется массой.
Масса – это мера инертности тела [m] = [кг].
Инертность – это способность тела приобретать ускорение.
1Н – сила, сообщающая телу массой 1кг ускорение 1м/с2 в направлении действия силы.
Запишем второй закон Ньютона
![]() ,
,
а
![]() ,
следовательно,
,
следовательно,
![]() . (7)
. (7)
Подведем m под знак дифференциала
![]() ,
но
,
но
![]() (8)
(8)
импульс (количество движения).
[Р]=[![]() ]
направление импульса совпадает с
направлением силы.
]
направление импульса совпадает с
направлением силы.
Перепишем второй закон Ньютона
![]() ;
;
![]() . (9)
. (9)
второй закон Ньютона через импульс
Третий закон Ньютона дополняет содержание второго и подчеркивает, что воздействие сил, изменяющих их состояния, носит характер взаимодействия.
Формулировка: действие всегда равно и противоположно противодействию, то есть действия двух тел друг на друга равны по величине и противоположны по направлению
![]() . Действия
двух тел друг на друга равны, но
противоположны по направлению. Этот
. Действия
двух тел друг на друга равны, но
противоположны по направлению. Этот
закон показывает, что из-за взаимодействия тел силы всегда появляются парами.
F12 = – F21, (7.1) где F12 — сила, действующая на первую материальную точку со стороны второй; F21 — сила, действующая на вторую материальную точку со стороны первой. Эти силы приложены к разным материальным точкам (телам), всегда действуют парами и являются силами одной природы.
2.4. Закон сохранения импульса
Из второго и третьего законов Ньютона вытекает закон сохранения импульса замкнутой системы. Совокупность материальных точек (тел), рассматриваемых как единое целое, называется механической системой. Силы взаимодействия между материальными точками механической системы называются внутренними. Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними. Механическая система тел, на которую не действуют внешние силы (они взаимно уравновешиваются), называется замкнутой или изолированной. В такой системе необходимо учитывать только силы взаимодействия между входящими в нее телами (внутренние силы). Строго говоря, изолированных механических систем в природе не существует. Рассмотрим изолированную механическую систему, состоящую из n тел с массами m1, m2, …, mn. Обозначим скорости этих тел через v1, v2, …, vn а внутреннюю силу, действующую на i-е тело со стороны k-го,- через Fik.
Складывая почленно эти уравнения и группируя силы Fik и Fki, получим:

Согласно третьему закону Ньютона Fik = -Fki, поэтому все скобки в правой части этого уравнения равны нулю, т.е.

Векторная сумма
![]() представляет
собой импульс всей системы. Таким
образом,
представляет
собой импульс всей системы. Таким
образом,
 или
или
 (2.9)
(2.9)
Геометрическая сумма импульсов тел, составляющих замкнутую систему, остается
постоянной при любых движениях и взаимодействиях тел системы.
Выражение (2.9) представляет собой закон сохранения импульса: импульс замкнутой системы тел с течением времени не изменяется. Закон сохранения импульса справедлив не только в классической механике; он выполняется и для замкнутых систем микрочастиц, т.е. действует и в квантовой механике. Другими словами, этот закон носит универсальный характер и является фундаментальным законом природы. Закон сохранения импульса является следствием однородности пространства: при параллельном переносе в пространстве замкнутой системы тел как целого ее физические свойства и законы движения не изменяются, т.е. не зависят от выбора положения начала координат инерциальной системы отсчета. В классической механике из-за независимости массы от скорости импульс системы можно выразить через скорость ее центра масс. Скорость i-й материальной точки связана с ее радиус-вектором ri соотношением:
Следовательно,
Центром масс или центром инерции системы материальных точек называется воображаемая тоска С, положение которой характеризует распределение массы этой системы. Ее радиус-вектор равен
где
 масса
системы.
Скорость
центра масс определяется выражением:
масса
системы.
Скорость
центра масс определяется выражением:
т.е.
![]() (2.10)
Другими
словами, импульс системы равен произведению
массы системы на скорость ее центра
инерции.
Подставив
выражение (2.10) в (2.9), получим:
(2.10)
Другими
словами, импульс системы равен произведению
массы системы на скорость ее центра
инерции.
Подставив
выражение (2.10) в (2.9), получим:
т.е. в изолированной механической системе центр масс находится в покое или движется равномерно и прямолинейно. Если система незамкнутая (на нее действуют помимо внутренних и внешние силы), то выражение (2.9) с учетом (2.10) запишется следующим образом:
или
 (2.11)
где
(2.11)
где
 ускорение
центра масс.
Из
(2.11) вытекает закон (теорема) движения
центра масс: центр масс системы
движется как материальная точка, в
которой сосредоточена масса всей системы
и на которую действует сила, равная
геометрической сумме всех внешних сил,
приложенных к системе.
ускорение
центра масс.
Из
(2.11) вытекает закон (теорема) движения
центра масс: центр масс системы
движется как материальная точка, в
которой сосредоточена масса всей системы
и на которую действует сила, равная
геометрической сумме всех внешних сил,
приложенных к системе.
3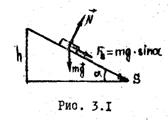 )
I. Работа
Количественной
характеристикой процесса взаимодействия
тел является работа, совершаемая силой
А.
Работа есть скалярная величина,
равная произведению проекции силы
(на направление перемещения) на величину
перемещения точки приложения
силы
)
I. Работа
Количественной
характеристикой процесса взаимодействия
тел является работа, совершаемая силой
А.
Работа есть скалярная величина,
равная произведению проекции силы
(на направление перемещения) на величину
перемещения точки приложения
силы
![]() (3.1)
гдеa - угол между
направлением силы и перемещением. Если
a<90°. то сила совершает положительную
работу (А>0), если a>90°, то А<0;
приa=90° сила работы не совершает,
oна лишь искривляет траекторию тела.
Если
работа совершается переменной
силойF=
F(
S) , во для элементарного
перемещения
(3.1)
гдеa - угол между
направлением силы и перемещением. Если
a<90°. то сила совершает положительную
работу (А>0), если a>90°, то А<0;
приa=90° сила работы не совершает,
oна лишь искривляет траекторию тела.
Если
работа совершается переменной
силойF=
F(
S) , во для элементарного
перемещения
![]() ,
а для всего
пути
,
а для всего
пути
 (3.2)
Вычислим для примера работу,
совершаемую силой тяжести при движении
тела по наклонной плоскости (Рис.
3.1):
(3.2)
Вычислим для примера работу,
совершаемую силой тяжести при движении
тела по наклонной плоскости (Рис.
3.1):
 ,
где
h - высота наклонной плоскости. Как видно,
работа силы тяжести не зависит от длины
пути, а зависит от начального и конечного
положений тела. Можно показать,
что такой же результат получается
для любой криволинейной траектории.
Таким же свойством обладает и сила
упругости.
Силы, обладающие
указанным свойством, называются
консервативными или потенциальными.
Для
таких сил работа по любому замкнутому
контуру равна нулю,
или:
,
где
h - высота наклонной плоскости. Как видно,
работа силы тяжести не зависит от длины
пути, а зависит от начального и конечного
положений тела. Можно показать,
что такой же результат получается
для любой криволинейной траектории.
Таким же свойством обладает и сила
упругости.
Силы, обладающие
указанным свойством, называются
консервативными или потенциальными.
Для
таких сил работа по любому замкнутому
контуру равна нулю,
или:
![]() (3.3)
Это и есть условие потенциального
характера силы.
Работа, совершаемая
за единицу временя, называется
мощностью:
(3.3)
Это и есть условие потенциального
характера силы.
Работа, совершаемая
за единицу временя, называется
мощностью:
![]() 2.
Энергия
В результате совершения
работы в окружающих телах происходят
определенные изменения - переход одних
форм движения материи в другие. Общей
количественной мерой различных форм
движения материи является физическая
величина, которую называют энергией
Е.
В физике соответственно
различным физическим процессам и
взаимодействиям различают механическую
энергию; тепловую, электромагнитную,
ядерную и т.д.
Энергия может, быть
выражена через величины, характеризующие
строение и состояние тела. Она является
функцией его состояния. Изменение
состояния тела, например, его движение,
приводит к изменению его энергии, а сам
процесс изменения есть результат работы,
совершаемой силой, поэтому изменение
энергии тела или системы тел определяется
работой, совершенной приложенными
к телу
силами:
2.
Энергия
В результате совершения
работы в окружающих телах происходят
определенные изменения - переход одних
форм движения материи в другие. Общей
количественной мерой различных форм
движения материи является физическая
величина, которую называют энергией
Е.
В физике соответственно
различным физическим процессам и
взаимодействиям различают механическую
энергию; тепловую, электромагнитную,
ядерную и т.д.
Энергия может, быть
выражена через величины, характеризующие
строение и состояние тела. Она является
функцией его состояния. Изменение
состояния тела, например, его движение,
приводит к изменению его энергии, а сам
процесс изменения есть результат работы,
совершаемой силой, поэтому изменение
энергии тела или системы тел определяется
работой, совершенной приложенными
к телу
силами:
![]() (3.4)
Механическая энергия состоит
из двух величин - кинетической энергии
K - энергии движения и потенциальной
энергии П - энергии взаимодействия между
телами:
(3.4)
Механическая энергия состоит
из двух величин - кинетической энергии
K - энергии движения и потенциальной
энергии П - энергии взаимодействия между
телами:
![]() (3.5)
3. Кинетическая и потенциальная
энергии
Чтобы получить выражение
для кинетической энергии подсчитаем
работу силы, необходимую для изменения
скорости тел от v1 до
v2:
(3.5)
3. Кинетическая и потенциальная
энергии
Чтобы получить выражение
для кинетической энергии подсчитаем
работу силы, необходимую для изменения
скорости тел от v1 до
v2:
![]()
 Итак,
совершенная силой работа равна приращению
кинетической энергии тела:
Итак,
совершенная силой работа равна приращению
кинетической энергии тела:
![]() ,
где
,
где![]() .
Потенциальная энергия обусловлена
характером взаимодействия между телами,
их взаимным расположением. Поэтому вид
формулы для потенциальной энергии
зависит от конкретного вида силы.
Так,
работа силы тяжести, необходимая дня
изменения положения тела относительно
Земли, равна:
.
Потенциальная энергия обусловлена
характером взаимодействия между телами,
их взаимным расположением. Поэтому вид
формулы для потенциальной энергии
зависит от конкретного вида силы.
Так,
работа силы тяжести, необходимая дня
изменения положения тела относительно
Земли, равна:
![]() ,
где
h1 и h2 - начальная и
конечная высота тела относительно
Земли. Эта работа равна изменению
потенциальной энергии тела:
,
где
h1 и h2 - начальная и
конечная высота тела относительно
Земли. Эта работа равна изменению
потенциальной энергии тела:
![]() ,
т.е.
совершенная силой работа равна убыли
потенциальной энергии тела.
Так
как
,
т.е.
совершенная силой работа равна убыли
потенциальной энергии тела.
Так
как
![]() ,
то
,
то
![]() или
или![]() (3.7)
Эта формула, связывающая между
собой силу, перемещений тела и
соответствующее этому изменение его
потенциальной энергии, даёт возможность
вычислить потенциальную энергию в
отдельном случае.
Вычислим,
например, потенциальную энергию силы
тяготения
(3.7)
Эта формула, связывающая между
собой силу, перемещений тела и
соответствующее этому изменение его
потенциальной энергии, даёт возможность
вычислить потенциальную энергию в
отдельном случае.
Вычислим,
например, потенциальную энергию силы
тяготения![]() Из
(3.7) находим
Из
(3.7) находим
![]() и
и
![]() ,
,
![]() есть
так называемый нулевой уровень
потенциальной энергии, который обычно
выбирается из условия
есть
так называемый нулевой уровень
потенциальной энергии, который обычно
выбирается из условия
![]() ,
тогда
=
0 и
,
тогда
=
0 и
![]() 4.
Закон сохранения механической энергии
В изолированной системе кроме
полного импульса сохраняющейся
величиной является и полная механическая
энергия.
Так, для двух взаимодействующих
материальных точек уравнения движения
будут
4.
Закон сохранения механической энергии
В изолированной системе кроме
полного импульса сохраняющейся
величиной является и полная механическая
энергия.
Так, для двух взаимодействующих
материальных точек уравнения движения
будут
![]() (3.8)
Под действием сил точки
совершают перемещения
(3.8)
Под действием сил точки
совершают перемещения
![]() ;
;
![]() .
Умножив каждое из уравнений (3.8) на
соответствующее перемещение,
получим:
.
Умножив каждое из уравнений (3.8) на
соответствующее перемещение,
получим:
![]() сложив
их, получим:
сложив
их, получим:
![]() (3.9)
т.к.
(3.9)
т.к.
![]() ,
то вместо (3.9) имеем:
,
то вместо (3.9) имеем:
![]() или
или![]() ,
где
,
где
![]() -
изменение кинетической и потенциальной
энергии всех тел системы. Тогда
-
изменение кинетической и потенциальной
энергии всех тел системы. Тогда
![]() ,
(3.10)
Полная энергия изолированной
системы есть величина постоянная. Это
и есть формулировка закона сохранения
энергии.
5. Удар абсолютно упругих
и неупругих тел
Под ударом понимают
кратковременное столкновение соударяющихся
тел.
Прямая, проходящая через точку
соприкосновения обоих тел, называется
линией удара (Рис. 3.2). Если она проходит
через центры масс тел, то удар центральный.
Отношение относительных скоростей
шаров после удара U к скорости
их v до удара называют коэффициентом
восстановления:
,
(3.10)
Полная энергия изолированной
системы есть величина постоянная. Это
и есть формулировка закона сохранения
энергии.
5. Удар абсолютно упругих
и неупругих тел
Под ударом понимают
кратковременное столкновение соударяющихся
тел.
Прямая, проходящая через точку
соприкосновения обоих тел, называется
линией удара (Рис. 3.2). Если она проходит
через центры масс тел, то удар центральный.
Отношение относительных скоростей
шаров после удара U к скорости
их v до удара называют коэффициентом
восстановления:
![]() .
. Если
Если
![]() ,
то удар абсолютно неупругий, если
,
то удар абсолютно неупругий, если
![]() ,
то удар абсолютно упругий.
При
абсолютно неупругом ударе часть
механической энергии тел переходит в
другие формы энергии (например, в
тепловую). В этом случае выполняется
лишь закон сохранения импульса, на
основании которого и находим скорость
шаров после столкновения:
,
то удар абсолютно упругий.
При
абсолютно неупругом ударе часть
механической энергии тел переходит в
другие формы энергии (например, в
тепловую). В этом случае выполняется
лишь закон сохранения импульса, на
основании которого и находим скорость
шаров после столкновения:
 (3.11)
Найдем изменение кинетической
энергии шаров, т.е. ту её часть которая
перешла во внутреннюю энергию:
(3.11)
Найдем изменение кинетической
энергии шаров, т.е. ту её часть которая
перешла во внутреннюю энергию:
 (3.12)
При
абсолютно, упругом ударе потерь энергии
нет, н в этом случае выполняются законы
сохранения импульса и энергии:
(3.12)
При
абсолютно, упругом ударе потерь энергии
нет, н в этом случае выполняются законы
сохранения импульса и энергии:
 Решая
эти уравнения, находим:
Решая
эти уравнения, находим:
 (3.13)
Когда массы соударяющихся
тел равны:
(3.13)
Когда массы соударяющихся
тел равны:
![]() ,
то шары обмениваются скоростями:
,
то шары обмениваются скоростями:![]()
4) I. Кинематика
вращательного движения
Абсолютно
твердым телом в механике называют
совокупность частиц, взаимное расположение
которых остается неизменным во время
движения.
В ращательным
называют такое движение, при котором
все точки тела описывают концентрические
окружности, центры которых лежат на
одной прямой, называемой осью
вращения.
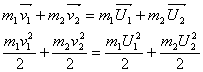
Положение вращающегося
тела может быть определено взятым с
соответствующим знаком двугранным
углом j между двумя полуплоскостями,
проходящими через ось вращения, одна
из которых Q неподвижна относительно
С.О., а другая Р связана с телом и
вращается вместе о ним (рис. 4.1). Знак j
определяют по правилу правого винта.
Положение тела в любой момент времени
t определяется уравнением
ращательным
называют такое движение, при котором
все точки тела описывают концентрические
окружности, центры которых лежат на
одной прямой, называемой осью
вращения.
Положение вращающегося
тела может быть определено взятым с
соответствующим знаком двугранным
углом j между двумя полуплоскостями,
проходящими через ось вращения, одна
из которых Q неподвижна относительно
С.О., а другая Р связана с телом и
вращается вместе о ним (рис. 4.1). Знак j
определяют по правилу правого винта.
Положение тела в любой момент времени
t определяется уравнением
![]() ,
дающим закон вращательного
движения.
Различные точки тела
проходят при одинаковом угловом
перемещении d
j разные линейные
перемещения d
S, которые связаны
соотношением:
,
дающим закон вращательного
движения.
Различные точки тела
проходят при одинаковом угловом
перемещении d
j разные линейные
перемещения d
S, которые связаны
соотношением:
![]() (4.1)
где r -
расстояние от точки тела до оси
вращения.
Поэтому вращательное
движение удобно характеризовать не
линейными, а угловыми величинами,
одинаковыми для всех точек
тела.
Угловой скоростью
(4.1)
где r -
расстояние от точки тела до оси
вращения.
Поэтому вращательное
движение удобно характеризовать не
линейными, а угловыми величинами,
одинаковыми для всех точек
тела.
Угловой скоростью
![]() называют
скорость изменения угла
попорота:
называют
скорость изменения угла
попорота:
![]() (4.2)
Угловым ускорением
(4.2)
Угловым ускорением
![]() называют
величину, характеризующую быстроту
изменения угловой
скорости:
называют
величину, характеризующую быстроту
изменения угловой
скорости:
![]() (4.3)
С помощью (4.1) можно найти связь
и
в
с соответствующими линейными величинами
(4.3)
С помощью (4.1) можно найти связь
и
в
с соответствующими линейными величинами
![]() и
и
![]() :
:
![]() (4.4)
(4.4)
![]() (4.5)
Угловые скорость и
ускорение - векторные величины,
направленные вдоль оси вращения. Их
направление определяют с помощью
правила правого винта. Так,
что:
(4.5)
Угловые скорость и
ускорение - векторные величины,
направленные вдоль оси вращения. Их
направление определяют с помощью
правила правого винта. Так,
что:
![]() (4.6)
(4.6)
![]() (4.7)
Полное ускорение
(4.7)
Полное ускорение
![]() находится
по формуле:
находится
по формуле:
![]() (4.8)
(4.8)
2. Кинетическая энергия вращательного
движения. Момент инерции.
Если дело
вращается вокруг неподвижной оси, то
его кинетическая энергия равна:
![]() (Рис. 4.2.)
И
(Рис. 4.2.)
И спользуя
формулу (4.4), получим
спользуя
формулу (4.4), получим
![]() где
где
![]() и
и
![]() -
расстояние i-частицы тела до оси вращения;
-
расстояние i-частицы тела до оси вращения;
![]() -
её масса.
Величина, стоящая в
скобках, не зависит от скорости движения
тела и характеризует инерционные
свойства тела во вращательном движении:
чем больше эта величина, тем большую
энергию надо затратить для достижения
данной скорости. Эта величина,
характеризующая твердое тело, а также
выбранную, ось вращения, называется
моментом инерции тала относительно
данной оси
-
её масса.
Величина, стоящая в
скобках, не зависит от скорости движения
тела и характеризует инерционные
свойства тела во вращательном движении:
чем больше эта величина, тем большую
энергию надо затратить для достижения
данной скорости. Эта величина,
характеризующая твердое тело, а также
выбранную, ось вращения, называется
моментом инерции тала относительно
данной оси
![]() .
Тогда кинетическую энергию можно
записать в
виде:
.
Тогда кинетическую энергию можно
записать в
виде:
![]() (4.9)
Момент инерции тела вычисляют
по формуле:
(4.9)
Момент инерции тела вычисляют
по формуле:
![]() (4.10)
Д
(4.10)
Д ля
материальной точки, вращающейся вокруг
оси,
ля
материальной точки, вращающейся вокруг
оси,
![]() ;
для шара, вращающегося вокруг оси,
проходящей через его центр,
;
для шара, вращающегося вокруг оси,
проходящей через его центр,
![]() .Полная
кинетическая энергия катящегося тела
вычисляется по
формуле:
.Полная
кинетическая энергия катящегося тела
вычисляется по
формуле:
![]() (4.11)
Если известен момент инерции
относительно оси, проходя через центр
инерции тела
(4.11)
Если известен момент инерции
относительно оси, проходя через центр
инерции тела
![]() ,
можно вычислить момент инерция
относительно параллельной оси
(теорема Штейнера):
,
можно вычислить момент инерция
относительно параллельной оси
(теорема Штейнера):
![]() ,
(4.12)
где
,
(4.12)
где
![]() -
масса тела,
-
расстояние между осями (Рис. 4.3).
-
масса тела,
-
расстояние между осями (Рис. 4.3).
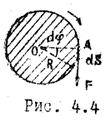 3.
Основное уравнение динамики вращательного
движения
Рассмотрим цилиндр
вращающийся вокруг неподвижной оси
(Рис. 4.4) под действием постоянной
касательной силы
3.
Основное уравнение динамики вращательного
движения
Рассмотрим цилиндр
вращающийся вокруг неподвижной оси
(Рис. 4.4) под действием постоянной
касательной силы
![]() .За
время
.За
время
![]() точка
приложения силы переместится на
точка
приложения силы переместится на
![]() и
работа этой силы будет
и
работа этой силы будет![]() ,
которая равна приращению кинетической
энергии:
,
которая равна приращению кинетической
энергии:
![]() ,
т.к.
,
то
,
т.к.
,
то
![]() (4.13)
Величину
(4.13)
Величину
![]() ,
равную произведению проекции силы на
плоскость, перпендикулярную оси вращения,
на рассотояние до оси вращения (плечо
силы
,
равную произведению проекции силы на
плоскость, перпендикулярную оси вращения,
на рассотояние до оси вращения (плечо
силы
![]() ),
называют моментом силы относительно
оси
),
называют моментом силы относительно
оси
![]() :
:
![]() ,
(4.14)
Тогда вместо (4.13) запишем:
,
(4.14)
Тогда вместо (4.13) запишем:
![]() или
или
![]() (4.15)
Эта формула выражает
основное уравнение динамики вращательного
движения: момент силы относительно оси
вращения равен произведению момента
инерции относительно этой оси на угловое
ускорение. Роль силы при вращательном
движении играет, момент силы, массы -
момент инерции. Момент силы - векторная
величина, направленная вдоль оси
вращения. Его направление определяется
правилом правого винта.
4. Момент
импульса. Закон сохранения момента
импульса
При вращательном
движении точки количественной мерой
её движения является момент импульса
точки относительно оси, который
определяется по
формуле:
(4.15)
Эта формула выражает
основное уравнение динамики вращательного
движения: момент силы относительно оси
вращения равен произведению момента
инерции относительно этой оси на угловое
ускорение. Роль силы при вращательном
движении играет, момент силы, массы -
момент инерции. Момент силы - векторная
величина, направленная вдоль оси
вращения. Его направление определяется
правилом правого винта.
4. Момент
импульса. Закон сохранения момента
импульса
При вращательном
движении точки количественной мерой
её движения является момент импульса
точки относительно оси, который
определяется по
формуле:
![]() ,
(4.16)
где
,
(4.16)
где
![]() -
радиус окружности, по которой движется
точка;
-
радиус окружности, по которой движется
точка;
![]() -
её имульс
Момент импульса
вращающегося тала равен сумме моментов
отдельных его частиц:
-
её имульс
Момент импульса
вращающегося тала равен сумме моментов
отдельных его частиц:
![]() Если
ось вращения неподвижна, то момент
импульса вращающегося тела можно найти
так:
Если
ось вращения неподвижна, то момент
импульса вращающегося тела можно найти
так:
![]() ,
(4.17)
где
и
-
масса и радиус вращения
,
(4.17)
где
и
-
масса и радиус вращения
![]() точки,
точки,
![]() -
момент
инерции всего тела
относительно выбранной оси
вращения.
Используя эту формулу,
основное уравнение вращательного
движения можно записать в
виде:
-
момент
инерции всего тела
относительно выбранной оси
вращения.
Используя эту формулу,
основное уравнение вращательного
движения можно записать в
виде:
![]() ,
(4.18)
Если на вращающееся тело не
действуют внешние силы или их результирующий
момент равен нулю, то момент импульса
тела относительно оси вращения есть
величина постоянная. Из (4.18) при
,
(4.18)
Если на вращающееся тело не
действуют внешние силы или их результирующий
момент равен нулю, то момент импульса
тела относительно оси вращения есть
величина постоянная. Из (4.18) при
![]() :
:
![]() и
и
![]() (4.19)
В изолированной системе полный
момент импульса есть величина постоянная.
Это есть закон сохранения момента
импульса.
(4.19)
В изолированной системе полный
момент импульса есть величина постоянная.
Это есть закон сохранения момента
импульса.
5)
I. Принцип относительности
К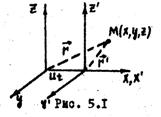 ак
только тело начинает двигаться со
скоростью, сравнимой со скоростью света
в пустоте
ак
только тело начинает двигаться со
скоростью, сравнимой со скоростью света
в пустоте
![]() ,
рассмотренные законы механики
(классическая механика) становятся
неприменимыми. В этом случае
они заменяются более общими законами
теории относительности (релятивистской
теории). Основное содержание этой
теории составляет доказательство
принципа относительности - независимости
физических процессов от выбора системы
отсчета. Доказательство этого закона
в инерциальных системах отсчета
рассматривается в специальной теории
относительности (С.Т.О.). Таким образом,
теория относительности по называет,
что законы природы не зависят от выбора
системы отсчета, положения и движения
наблюдателя, а результаты измерений в
различных системах отсчета могут быть
сопоставлены.
В классической
механике математическим выражением
принципа относительности являлись
преобразования Галилея.
позволявшие сопоставлять результаты
измерении в разных И.С.О.
Для случая
движения двух И.С.О., изображенных на
рис. 5.1,
,
рассмотренные законы механики
(классическая механика) становятся
неприменимыми. В этом случае
они заменяются более общими законами
теории относительности (релятивистской
теории). Основное содержание этой
теории составляет доказательство
принципа относительности - независимости
физических процессов от выбора системы
отсчета. Доказательство этого закона
в инерциальных системах отсчета
рассматривается в специальной теории
относительности (С.Т.О.). Таким образом,
теория относительности по называет,
что законы природы не зависят от выбора
системы отсчета, положения и движения
наблюдателя, а результаты измерений в
различных системах отсчета могут быть
сопоставлены.
В классической
механике математическим выражением
принципа относительности являлись
преобразования Галилея.
позволявшие сопоставлять результаты
измерении в разных И.С.О.
Для случая
движения двух И.С.О., изображенных на
рис. 5.1,
 (5.1)
где
(5.1)
где
![]() -
скорость движения системы
-
скорость движения системы
![]() относительно
относительно
![]() .
Из формул (5.1) вытекает и классический
закон сложения скоростей:
.
Из формул (5.1) вытекает и классический
закон сложения скоростей:
![]() Эта
формула оказалась неприменимой при
определении скорости света по отношению
к Земле (опыт Майкельсона и Морли, 1887
г.). Результат опыта показал, что скорость
свата во всех инерциальных системах
отсчета постоянна, она не зависит ни от
скорости источника, ни от скорости
приемника.
2. Постулаты Эйнштейна
Выход
из создавшегося положения был найден
Эйнштейном, который, анализируя опытные
факты, сформулировал два постулата:
1.
Не только механические, но и все физические
процессы протекают одинаково во всех
И.С.О.
2. Скорость света в вакууме
есть величина постоянная.
Этих
двух постулатов оказалось достаточно,
чтобы разрешить все возникшие
противоречия. Однако второй постулат
оказался в противоречии с преобразованиями
Галилея, из чего следовало, что
преобразования Галилея необходимо было
пересмотреть. Такой пересмотр оказался
связанным с коренной ломкой представлений
о пространстве и времени. В частности,
из постулатов следует, что понятие
одновременности, считавшееся само
собой разумеющимся, не является
абсолютным: в разных системах отсчета
время течет по-разному
Эта
формула оказалась неприменимой при
определении скорости света по отношению
к Земле (опыт Майкельсона и Морли, 1887
г.). Результат опыта показал, что скорость
свата во всех инерциальных системах
отсчета постоянна, она не зависит ни от
скорости источника, ни от скорости
приемника.
2. Постулаты Эйнштейна
Выход
из создавшегося положения был найден
Эйнштейном, который, анализируя опытные
факты, сформулировал два постулата:
1.
Не только механические, но и все физические
процессы протекают одинаково во всех
И.С.О.
2. Скорость света в вакууме
есть величина постоянная.
Этих
двух постулатов оказалось достаточно,
чтобы разрешить все возникшие
противоречия. Однако второй постулат
оказался в противоречии с преобразованиями
Галилея, из чего следовало, что
преобразования Галилея необходимо было
пересмотреть. Такой пересмотр оказался
связанным с коренной ломкой представлений
о пространстве и времени. В частности,
из постулатов следует, что понятие
одновременности, считавшееся само
собой разумеющимся, не является
абсолютным: в разных системах отсчета
время течет по-разному
![]() .
3.
Преобразования Лоренца
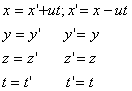
В С.Т.О.
преобразования координат (5.1), описывающие
переход от одной И.С.О. к другой, заменяются
новыми соотношениями, которые удовлетворяют
постоянству скорости света -
преобразованиями Лоренца.
Для частного случая двух систем
и
,
находящихся в относительном движении
вдоль оси
.
3.
Преобразования Лоренца
В С.Т.О.
преобразования координат (5.1), описывающие
переход от одной И.С.О. к другой, заменяются
новыми соотношениями, которые удовлетворяют
постоянству скорости света -
преобразованиями Лоренца.
Для частного случая двух систем
и
,
находящихся в относительном движении
вдоль оси
![]() (Рис.
5.1), они имеют вид:
(Рис.
5.1), они имеют вид:
![]()
 (5.3)
где
(5.3)
где
![]() .
Из
этих формул видно, что при малых скоростях
для
.
Из
этих формул видно, что при малых скоростях
для
![]() формулы
(5.3) переходят в (5.1), следовательно, законы
классической физики входят в С.Т.О. как
частный случай.
Из преобразований
Лоренца вытекают основные следствия.
4.
Замедление времени
В направлении
формулы
(5.3) переходят в (5.1), следовательно, законы
классической физики входят в С.Т.О. как
частный случай.
Из преобразований
Лоренца вытекают основные следствия.
4.
Замедление времени
В направлении
![]() часы,
связанные с системой
,
измеряют интервал времени:
.
При наблюдении в движущейся системе
этот интервал становится равным
часы,
связанные с системой
,
измеряют интервал времени:
.
При наблюдении в движущейся системе
этот интервал становится равным
![]()
 ,
(5.4)
Для движущегося наблюдателя
время идёт медленнее.
5. Сокращение
длин
Если в системе
находится
отрезок
,
(5.4)
Для движущегося наблюдателя
время идёт медленнее.
5. Сокращение
длин
Если в системе
находится
отрезок
![]() ,
то это же расстояние для движущегося
наблюдателя в системе
окажется
равным:
,
то это же расстояние для движущегося
наблюдателя в системе
окажется
равным:
 Так
как наблюдатель видит в своей системе
оба
конца одновременно
Так
как наблюдатель видит в своей системе
оба
конца одновременно
![]() ,
то из формул обратного преобразования
Лоренца
,
то из формул обратного преобразования
Лоренца
![]() (5.3)
получим
(5.3)
получим
![]() ,
откуда следует, что:
,
откуда следует, что:
 ,
(5.5)
Для движущегося наблюдателя
длина отрезка кажется уменьшенной в
направлении движения
,
(5.5)
Для движущегося наблюдателя
длина отрезка кажется уменьшенной в
направлении движения
![]() раз,
т.е. движущемуся наблюдателю шар кажется
сплющенным эллипсоидом.
6. Сложение
скоростей в теории относительности.
Пусть некоторая точка М движется
относительно системы
вдоль
оси
раз,
т.е. движущемуся наблюдателю шар кажется
сплющенным эллипсоидом.
6. Сложение
скоростей в теории относительности.
Пусть некоторая точка М движется
относительно системы
вдоль
оси
![]() со
скоростью
со
скоростью
![]() .
Скорость её относительно неподвижной
системы
будет:
.
Скорость её относительно неподвижной
системы
будет:
![]() ,
(5.6)
Координата этой точки определится
из формул (5.3):
,
(5.6)
Координата этой точки определится
из формул (5.3):
![]() ,
откуда
,
откуда![]() ,
(5.7)
Аналогично определяем
:
,
(5.7)
Аналогично определяем
:
 ,
(5.8)
Подставляя (5.7) и (5.8) в (5.6) и
учитывая, что
,
(5.8)
Подставляя (5.7) и (5.8) в (5.6) и
учитывая, что
![]() ,
получаем:
,
получаем:
![]() ,
(5.9)
Эта формула выражает
релятивистский закон сложения скоростей.
Сравнивая (5.9) с (5.2), видно, что при малых
скоростях
,
(5.9)
Эта формула выражает
релятивистский закон сложения скоростей.
Сравнивая (5.9) с (5.2), видно, что при малых
скоростях
![]() теорема
сложения скоростей Галилея остаётся
верной. Из формулы (5.9) следует
предельный характер скорости света.
Действительно, если относительно
послать
световой импульс со скоростью
теорема
сложения скоростей Галилея остаётся
верной. Из формулы (5.9) следует
предельный характер скорости света.
Действительно, если относительно
послать
световой импульс со скоростью
![]() ,
то относительно
получим:
,
то относительно
получим:
![]() ,
т.е.
в системе
скорость
светового импульса тоже равна
,
т.е.
в системе
скорость
светового импульса тоже равна
![]() .
Найдем другие составляющие скорости
.
Найдем другие составляющие скорости
![]() и
и
![]() .
Так как
.
Так как
![]() ,
то:
,
то:
![]() ,
(5.10)
Из формулы (5.3) находим:
,
(5.10)
Из формулы (5.3) находим:
 Подставляя
это в (5.10), получим:
Подставляя
это в (5.10), получим:
 (5.11)
7. Изменение массы со скоростью
В
классической механике основной закон
динамики имеет вид:
(5.11)
7. Изменение массы со скоростью
В
классической механике основной закон
динамики имеет вид:
![]() или при
или при
![]() Из
этой формулы следует, что при действии
постоянной силы скорость может возрастать
неограниченно:
Из
этой формулы следует, что при действии
постоянной силы скорость может возрастать
неограниченно:
![]() при
при
![]() Этот
результат противоречит теории
относительности. Поэтому, естественно,
сделать предположений, что масса как
мера инертности должна зависеть от
скорости:
Этот
результат противоречит теории
относительности. Поэтому, естественно,
сделать предположений, что масса как
мера инертности должна зависеть от
скорости:
![]() ,
так что при
,
так что при
![]() ,
т.к. при этой скорость тела будет
ограничена.
Из преобразований
Лоренца вытекает, что масса, определяемая
как
,
т.к. при этой скорость тела будет
ограничена.
Из преобразований
Лоренца вытекает, что масса, определяемая
как
![]() ,
является переменной, зависящей от
скорости. Эта зависимость дается
выражением:
,
является переменной, зависящей от
скорости. Эта зависимость дается
выражением:
 ,
(6.1)
где
,
(6.1)
где
![]() -
масса покоя, т.е. в той С.О. где тело
покоится,
называют
релятивистской массой.
Эта формула
имеет очень большое значение и постоянно
используется в атомной физика, где
частицы двигаются со скоростями
1111
.
Она была проверена экспериментально.
Таким
образом, в С.Т.О. основной закон динамики
приобретает вид:
-
масса покоя, т.е. в той С.О. где тело
покоится,
называют
релятивистской массой.
Эта формула
имеет очень большое значение и постоянно
используется в атомной физика, где
частицы двигаются со скоростями
1111
.
Она была проверена экспериментально.
Таким
образом, в С.Т.О. основной закон динамики
приобретает вид:
 (6.2)
или
(6.2)
или
 (6.3)
8. Движение релятивистской
частицы
Найдем закон движения
релятивистской частицы, движущейся под
действием постоянной силы
(6.3)
8. Движение релятивистской
частицы
Найдем закон движения
релятивистской частицы, движущейся под
действием постоянной силы
![]() ,
которая в начальный момент
,
которая в начальный момент
![]() покоилась.
Из
формулы (6.2) находим:
покоилась.
Из
формулы (6.2) находим:
 откуда
откуда![]() ,
(6.4)
где
,
(6.4)
где
![]() при
малых
при
малых
![]() ,
,
![]() и
и
![]() как
и в классической механике; при
как
и в классической механике; при
![]() ,
,
![]() и
и
![]() Путь,
пройденный телом, будет равен
Путь,
пройденный телом, будет равен
![]() ,
вычисления дают:
,
вычисления дают:
 (6.5)
при малых
(6.5)
при малых
![]() используя
формулу
используя
формулу
![]() ,
получаем:
,
получаем:
 как
в классической механике.
9. Связь
между массой и энергией
Энергия
как
в классической механике.
9. Связь
между массой и энергией
Энергия
![]() движущегося
тела вызывается работой силы
действующей
на него, следовательно:
движущегося
тела вызывается работой силы
действующей
на него, следовательно:
![]() или
или
![]() (6.6)
Из формулы (6.1) получаем:
(6.6)
Из формулы (6.1) получаем:
![]() и
и
![]() Подставляя
эти выражения в (б.6), получаем:
Подставляя
эти выражения в (б.6), получаем:
![]() ,
откуда
,
откуда
![]() После
интегрирования
После
интегрирования
![]() .
Полагая
.
Полагая
![]() ,
получим энергию покоя тела
,
получим энергию покоя тела
![]() (6.7)
и энергию движущегося тела
(6.7)
и энергию движущегося тела
 (6.8)
Из
формул (6.7) и (6.6) следует, что между массой
и энергией существует неразрывная
связь:
(6.8)
Из
формул (6.7) и (6.6) следует, что между массой
и энергией существует неразрывная
связь:
![]() (6.9)
Всякая
масса
связана
с определенным количеством энергии
(6.9)
Всякая
масса
связана
с определенным количеством энергии
![]() .
В
состоянии покоя с массой
связана
энергия покоя:
.
В
состоянии покоя с массой
связана
энергия покоя:
![]() С
другой стороны, с энергией
связана
определенная масса:
С
другой стороны, с энергией
связана
определенная масса:
![]() Изменение
энергии влечет одновременно и изменение
массы наоборот:
Фундаментальное
соотношение (6.9) было впервые установлено
Эйнштейном.
10. Кинетическая энергия.
Энергия и импульс
Кинетическая
энергия
равна
разности
и
Изменение
энергии влечет одновременно и изменение
массы наоборот:
Фундаментальное
соотношение (6.9) было впервые установлено
Эйнштейном.
10. Кинетическая энергия.
Энергия и импульс
Кинетическая
энергия
равна
разности
и
![]() :
:
![]() (6.10)
При малых скоростях (
(6.10)
При малых скоростях (![]() )
)
 и
из формулы (6.10) .получаем:
и
из формулы (6.10) .получаем:
![]() ,
т.е.
получим выражение для кинетической
энергии в классической механике.
Исключив
,
т.е.
получим выражение для кинетической
энергии в классической механике.
Исключив
![]() ив
выражений
ив
выражений
![]() и
и
![]() ,
находим соотношение между импульсом
и энергией:
,
находим соотношение между импульсом
и энергией:
![]() ,
откуда
,
откуда
![]() (6.10)
Для частицы с массой покоя
(6.10)
Для частицы с массой покоя
![]() (фотон)
имеем:
(фотон)
имеем:
![]()
http://ua.coolreferat.com/%D0%A4%D0%B8%D0%B7%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B5_%D0%BE%D1%81%D0%BD%D0%BE%D0%B2%D1%8B_%D0%BA%D0%BB%D0%B0%D1%81%D1%81%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%BE%D0%B9_%D0%BC%D0%B5%D1%85%D0%B0%D0%BD%D0%B8%D0%BA%D0%B8_%D1%87%D0%B0%D1%81%D1%82%D1%8C=3