

7.2 Оценка качества сау по расположению корней характеристического уравнения
Рассмотрим характеристическое уравнение САУ:
![]() .
(7.6)
.
(7.6)
Если при
![]() имеем
имеем
![]() ,
то ему соответствует составляющая
переходного процесса:
,
то ему соответствует составляющая
переходного процесса:
![]() ,
(7.7)
,
(7.7)
если есть пара
комплексно-сопряженных корней
![]() ,
то для них
,
то для них
![]() .
(7.8)
.
(7.8)
Как видно из
выражений (7.7) и (7.8), интенсивность
затухания переходного процесса
определяется величиной отрицательной
вещественной части корня. Потребуем,
чтобы все составляющие переходного
процесса за время
![]() уменьшилась не менее чем в
уменьшилась не менее чем в
![]() раз. Тогда
раз. Тогда
 .
(7.9)
.
(7.9)
Поскольку огибающей
составляющей переходного процесса
является экспонента, за которую кривая
не выходит, то, предположив, что точки
![]() и
и
![]() находятся на ней, получим:
находятся на ней, получим:
![]() .
(7.10)
.
(7.10)
откуда
![]() .
(7.11)
.
(7.11)
Условие (7.11)
указывает на то, что если по модулю
отрицательная часть всех корней
характеристического уравнения (7.6) будет
не менее
![]() ,
т.е. все корни будут располагаться левее
прямой, проведенной на комплексной
плоскости параллельно оси ординат на
расстоянии
,
т.е. все корни будут располагаться левее
прямой, проведенной на комплексной
плоскости параллельно оси ординат на
расстоянии
![]() слева, то каждая составляющая переходного
процесса уменьшается за время
не менее чем в
слева, то каждая составляющая переходного
процесса уменьшается за время
не менее чем в
![]() раз (рисунок 7.1).
раз (рисунок 7.1).
Это условие можно определить не решая характеристическое уравнение. И.Н.Вознесенский впервые использовал для этой цели критерий Гурвица (1941 г.) и связал его с длительностью переходного процесса.
Для того чтобы
все корни характеристического уравнения
(7.6) находились левее прямой
![]() ,
проведенной на расстоянии, обеспечивающим
требуемую абсолютную степень затухания,
необходимо, чтобы преобразованное
характеристическое уравнение заменой
,
проведенной на расстоянии, обеспечивающим
требуемую абсолютную степень затухания,
необходимо, чтобы преобразованное
характеристическое уравнение заменой
![]() удовлетворяло условию устойчивости.
Для рисунка 7.1 справедливы соотношения:
удовлетворяло условию устойчивости.
Для рисунка 7.1 справедливы соотношения:
![]() .
.
Заменив в (7.6)
на
![]() ,
получим:
,
получим:
![]() .
(7.12)
.
(7.12)
Применяя к (7.12) критерий Гурвица, определяем выполнение условия требуемой абсолютной степени затухания. Рассматриваемое условие может быть проверено с помощью критерия Михайлова.
Для того чтобы
вектор
![]() скользил по линии
,
обеспечивая поворот против часовой
стрелки при изменении
от
скользил по линии
,
обеспечивая поворот против часовой
стрелки при изменении
от
![]() до
,
необходимо в характеристическом
уравнении
до
,
необходимо в характеристическом
уравнении
![]() (7.13)
(7.13)
выбрать соответствующим образом . Из рисунка 7.1 видно:
![]() ;
;
![]() ,
т.е.
,
т.е.
![]() .
.
Подставляя в выражение
(7.6) вместо
![]() ,
получаем
,
получаем
![]() .
(7.14)
.
(7.14)
Если
![]() ,
то САУ обладает требуемой абсолютной
степенью затухания.
,
то САУ обладает требуемой абсолютной
степенью затухания.
Иногда требуется
уменьшение амплитуды гармонических
колебаний каждой составляющей переходного
процесса за период
![]() в
в
![]() раз. В этом случае
раз. В этом случае
 ,
(7.15)
,
(7.15)
или
![]() ,
где
,
где
![]() ,
поэтому
,
поэтому
![]() .
(7.16)
.
(7.16)
Для выполнения указанного условия необходимо, чтобы все корни характеристического уравнения располагались в секторе, ограниченном лучами, проведенными под углом к мнимой оси (рисунок 7.2).
Проверка этого
условия может быть произведена с
помощью критерия Михайлова. В данном
случае вектор
![]() должен скользить по лучам
должен скользить по лучам
![]() и
и
![]() при изменении
от
при изменении
от
![]() до
до
![]() .
.
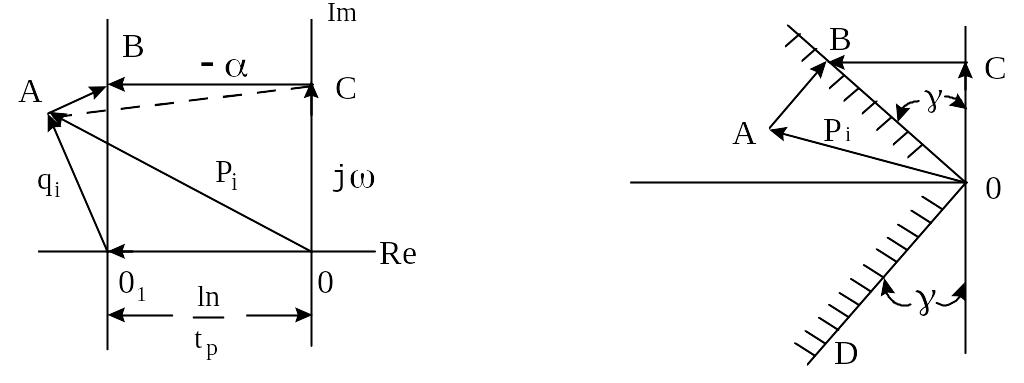
Рисунок 7.1 - Оценка абсолютной Рисунок 7.2 - Оценка относительной
степени затухания степени затухания
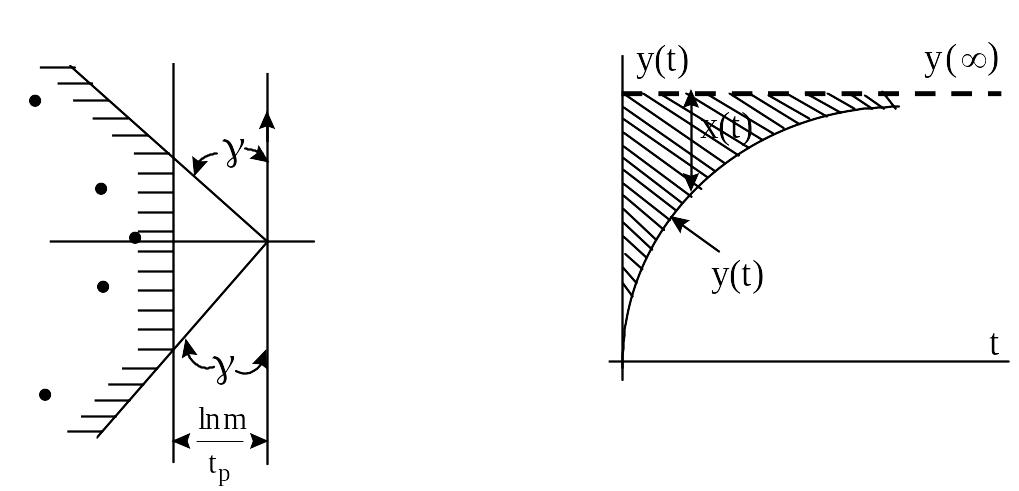
Рисунок 7.3 - Область требуемой абсолют- Рисунок 7.4 - Интегральная
ной и относительной степени затухания оценка качества САУ

Рисунок 7.5 - Вид колебательных процессов
Из рисунка 7.2
![]() ,
откуда
,
откуда
![]() ;
;
![]() .
.
Подставляя найденное
значение
![]() в выражения (7.6) и (7.13), получим годограф
в выражения (7.6) и (7.13), получим годограф
![]() .
(7.17) При изменении
от
до
каждый из составляющих векторов
.
(7.17) При изменении
от
до
каждый из составляющих векторов
![]() повернется на угол
повернется на угол
![]() ,
если он находится вне сектора
,
если он находится вне сектора
![]() .
.
Если все корни характеристического уравнения (7.6) находятся внутри сектора, ограниченного углами , то выполняется условие относительной степени затухания и
![]() .
.
Учитывая, что
вещественная часть
![]() - четная функция, можно
изменять от
- четная функция, можно
изменять от
![]() до
,
при этом
до
,
при этом
![]() .
(7.18)
.
(7.18)
Можно потребовать чтобы САУ одновременно удовлетворяла условию абсолютной и относительной степени затухания. В этом случае корни характеристического уравнения должны находиться в области, ограниченной двумя лучами проведенными под углом к мнимой оси, проведенной слева от нее на расстоянии (рисунок 7.3).
7.3 Интегральные оценки качества САУ
Наиболее простым интегральным критерием качества САУ является критерий учитывающий интеграл отклонений регулируемой величины.
![]() ,
(7.19)
,
(7.19)
где
![]() .
Здесь
.
Здесь
![]() - регулируемая величина,
- регулируемая величина,
![]() - установившееся значение регулируемой
величины (рисунок 7.4). Этим критерием
можно пользоваться только в случае
знакопостоянства
- установившееся значение регулируемой
величины (рисунок 7.4). Этим критерием
можно пользоваться только в случае
знакопостоянства
![]() .
САУ тем лучше, чем меньше
.
САУ тем лучше, чем меньше
![]() ,
т.е. чем меньше площадь, ограниченная
кривой
и прямой
(рисунок 7.4). В пределе она может быть
равна нулю, когда выходная величина
устанавливается мгновенно на новом
заданном значении.
,
т.е. чем меньше площадь, ограниченная
кривой
и прямой
(рисунок 7.4). В пределе она может быть
равна нулю, когда выходная величина
устанавливается мгновенно на новом
заданном значении.
Вычислить интеграл (7.19) можно двумя способами. В первом способе учитывается то, что является фактически свободной составляющей процесса, поскольку отсчитывается от нового установившегося состояния. Если имелось исходное дифференциальное уравнение
![]() ,
,
то сделав замену
![]() ,
мы получим однородное дифференциальное
уравнение
,
мы получим однородное дифференциальное
уравнение
![]() .
(7.20)
.
(7.20)
Выражение (7.19) с учетом уравнения (7.20) можно записать так :
![]() .
.
Так как
![]() ,
то
,
то
![]() .
.
Поскольку при
![]() имеем новое установившееся состояние,
от которого производим отсчет, то
имеем новое установившееся состояние,
от которого производим отсчет, то
![]() и
и
![]() .
(7.21)
.
(7.21)
Начальные условия определяются из исходного уравнения с учетом правой части.
Второй метод вычисления предложил в 1940 академик В.С. Кулебакин.
Пусть САУ имеет передаточную функцию
 и
и
![]() (7.22)
(7.22)
Тогда
![]() .
.
Поскольку
![]() ,
то, устремив
к нулю, получим
,
то, устремив
к нулю, получим
![]() .
.
По теореме о конечном значении оригинала функции
 .
.
С учетом полученного результата получим формулу (7.23):

![]() (7.23)
(7.23)
Этой формулой можно пользоваться при нулевых предначальных условиях, в то время как на выражение (7.21) это условие не распространяется.
Интегральный квадратичный критерий качества
![]() (7.24)
(7.24)
Идея его
использования принадлежит Л. Н.
Мандельштаму и Н. Д. Папалекси (1907-1910
гг.). Оценка качества САУ по
![]() может производиться для случая
колебательных систем (рисунок 7.5). Однако
частота колебаний при этом не учитывается.
Параметры САУ стремятся выбрать так,
чтобы квадратичная оценка
приняла минимальное значение. Для этой
цели выражают
может производиться для случая
колебательных систем (рисунок 7.5). Однако
частота колебаний при этом не учитывается.
Параметры САУ стремятся выбрать так,
чтобы квадратичная оценка
приняла минимальное значение. Для этой
цели выражают
![]() через эти параметры и затем ищут их
значения, минимизирующие значения
из уравнений:
через эти параметры и затем ищут их
значения, минимизирующие значения
из уравнений:
![]() ;
;
![]() ,
,
![]() ,
,
где , , - варьируемые параметры.
Лишен недостатка, присущего , улучшенный квадратичный критерий качества:
![]() ,
(7.25)
,
(7.25)
где
![]() - некоторая постоянная времени, учитывающая
долю влияния скорости изменения
регулируемой величины на
- некоторая постоянная времени, учитывающая
долю влияния скорости изменения
регулируемой величины на
![]() .
.
При
![]() получаем обычный квадратичный критерий
качества.
получаем обычный квадратичный критерий
качества.
Оптимальный вид
переходного процесса для
представляет скачок, как и возмущение
![]() .
Для улучшенного квадратичного критерия,
как доказал А.А. Красовский, оптимальным
является переходный процесс, изменяющийся
по экспоненте с постоянной времени,
равной
:
.
Для улучшенного квадратичного критерия,
как доказал А.А. Красовский, оптимальным
является переходный процесс, изменяющийся
по экспоненте с постоянной времени,
равной
:
![]() .(7.26)
.(7.26)
Из выражения (7.26)
следует, что
![]() достигает максимума,
достигает максимума,
если
![]() .
Это возможно в том случае, когда
.
Это возможно в том случае, когда
![]() ,
или
,
или
![]() .
.
Для конкретной
системы это условие может оказаться
недостижимым, когда
![]() .
В выражение для
входят параметры регулятора, поэтому
выбирают их из условия минимума
,
как в предыдущем случае.
.
В выражение для
входят параметры регулятора, поэтому
выбирают их из условия минимума
,
как в предыдущем случае.
7.4 Оценка качества САУ по частотным характеристикам
Рассматривая запас устойчивости САУ по модулю и фазе, было установлено, что они определяются расположением на комплексной плоскости АФХ разомкнутой системы. Для обеспечения соответствующих параметров (запаса устойчивости по модулю и фазе) необходимо, чтобы АФХ разомкнутой САУ не заходила в определенную зону на комплексной плоскости (рисунок 7.6).
Широкое
распространение для анализа качества
главным образом следящих систем (с
единичной обратной связью) получил так
называемый показатель колебательности.
Некоторые зарубежные авторы под
показателем колебательности
![]() понимают величину максимального значения
АФХ замкнутой системы по задающему
воздействию
понимают величину максимального значения
АФХ замкнутой системы по задающему
воздействию
![]() ,
отечественные ученые В.А.Бесекерский,
А.А.Красовский, В.В.Солодовников принимают
за
отношение
к ее начальной ординате при
,
отечественные ученые В.А.Бесекерский,
А.А.Красовский, В.В.Солодовников принимают
за
отношение
к ее начальной ординате при
![]() :
:
![]() .
(7.27)
.
(7.27)
В общем любую
систему управления можно рассматривать
как САУ с единичной обратной связью,
если измеритель отнести к объекту.
Тогда, обозначив АФХ разомкнутой САУ
через
![]() ,
АФХ замкнутой системы по заданию запишем
в следующем виде:
,
АФХ замкнутой системы по заданию запишем
в следующем виде:
![]() .
(7.28)
.
(7.28)
Для астатической
системы
![]() и понятия для
совпадают. Для статической системы эти
понятия будут тем ближе, чем больше
коэффициент усиления разомкнутой САУ
и понятия для
совпадают. Для статической системы эти
понятия будут тем ближе, чем больше
коэффициент усиления разомкнутой САУ
![]() :
:
![]() .
(7.29)
.
(7.29)
Недостатком задания запаса устойчивости по модулю и фазе является необходимость знания двух чисел и . Анализ САУ по показателю колебательности требует знания одного числа .
Чем меньше запас
устойчивости, тем больше склонность
САУ к колебаниям, тем выше резонансный
пик на
![]() .
Допустимое значение показателя
колебательности определяется на основе
опыта эксплуатации САУ. Считается, что
в хорошо демпфированной системе
.
Допустимое значение показателя
колебательности определяется на основе
опыта эксплуатации САУ. Считается, что
в хорошо демпфированной системе
![]() .
.
Для отыскания показателя колебательности нет необходимости строить АФХ замкнутой САУ. Можно его определить по АФХ разомкнутой системы, если на комплексной плоскости нанести окружности с известным показателем колебательности.
По определению
 .
.
![]() .
.
![]() .
.
Разделим все слагаемые
на
![]() :
:
![]() .
.
Обозначим
![]() ,
тогда
,
тогда
![]() .
.
Прибавим и вычтем
![]() в левой части уравнения.
в левой части уравнения.
Тогда
![]() ;
;
Обозначим
![]() ;
;
![]() .
.
С учетом обозначений исходное уравнение можно записать так:
![]() .
(7.30)
.
(7.30)
Это есть уравнение
окружности радиусом
![]() и с центром, смещенным влево от начала
координат на величину
и с центром, смещенным влево от начала
координат на величину
![]() ,
рисунок 7.7. Если обозначить через
,
рисунок 7.7. Если обозначить через
![]() - расстояние от начала координат до
окружности с заданным значением
,
то
- расстояние от начала координат до
окружности с заданным значением
,
то
![]() .
.
При
![]() окружность вырождается в прямую,
параллельную мнимой оси, смещенную
влево от нее на расстояние
окружность вырождается в прямую,
параллельную мнимой оси, смещенную
влево от нее на расстояние
![]() .
.
При
![]() окружность вырождается в точку с
координатами
окружность вырождается в точку с
координатами
![]() .
.
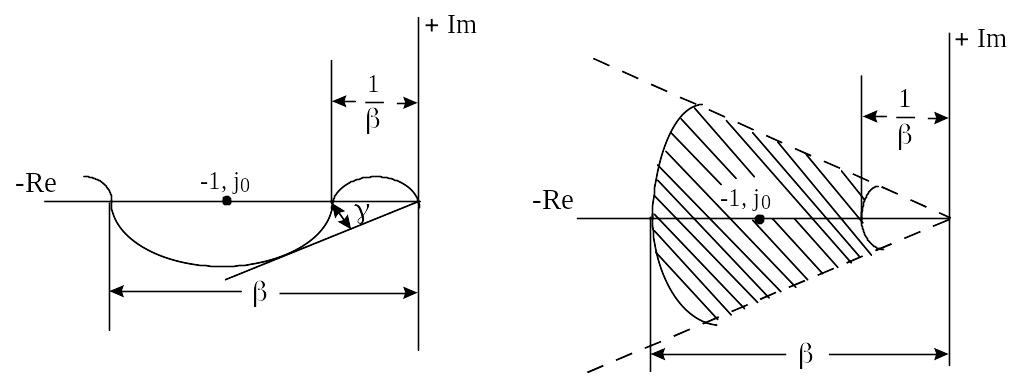
Рисунок 7.6 - Запретная зона для АФХ разомкнутой САУ
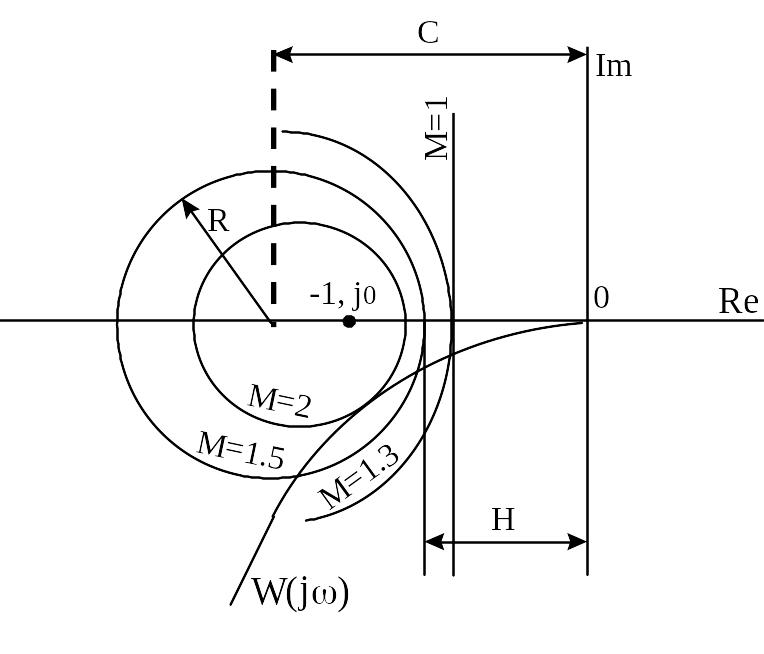
Рисунок 7.7 - САУ
обладает требуемым показателем
![]()
Нанеся в тех же координатах АФХ разомкнутой САУ, мы найдем значение для минимальной окружности, касающейся АФХ и характеризующей колебательность замкнутой системы.
Очевидно, что запас
устойчивости САУ по фазе будет определяться
так:![]() ,
откуда
,
откуда![]() .
(7.31)
.
(7.31)
Быстродействие
САУ может быть определено по частоте
среза. Если переходный процесс
заканчивается за
![]() колебания, то
колебания, то
![]() .
.
Время достижения
первого максимума
![]() или
или
![]() ,
,
где
![]() -
частота, соответствующая точке АФХ,
ближе всего расположенной к точке на
комплексной плоскости
.
-
частота, соответствующая точке АФХ,
ближе всего расположенной к точке на
комплексной плоскости
.
8 УЛУЧШЕНИЕ КАЧЕСТВА САУ
8.1 Введение производной в закон регулирования
Рассмотрим
систему, изображенную на рисунке 8.1.
Здесь пунктиром показано корректирующее
звено с передаточной функцией
![]() .
.
Передаточная
функция разомкнутой нескорректированной
САУ
![]() .
При анализе устойчивости САУ по критерию
Найквиста - Михайлова строится АФХ
разомкнутой системы
.
При анализе устойчивости САУ по критерию
Найквиста - Михайлова строится АФХ
разомкнутой системы
![]() .
После введения корректирующего звена
результирующая передаточная функция
разомкнутой системы будет
.
После введения корректирующего звена
результирующая передаточная функция
разомкнутой системы будет
![]() .
При этом ее АФХ также изменится. Обозначим
ее
.
При этом ее АФХ также изменится. Обозначим
ее
![]() :
:
![]() .
(8.1)
.
(8.1)
Из выражения
(8.1) видно, что наличие производной
приводит к деформации исходной АФХ за
счет добавления к каждому вектору
дополнительного вектора
![]() ,
направленного перпендикулярно исходному
в положительном направлении, рисунок
8.2. (против хода часовой стрелки).
,
направленного перпендикулярно исходному
в положительном направлении, рисунок
8.2. (против хода часовой стрелки).
На рисунке 8.2
деформированная АФХ пересекает
отрицательную вещественную ось правее
исходной, т.е. введение производной
может увеличить запас устойчивости по
модулю. Однако это не всегда так. В
зависимости от формы
и выбора величины
![]() наличие производной может как повысить,
так и понизить запас устойчивости по
модулю (удалить или приблизить АФХ к
критической точке на комплексной
плоскости
наличие производной может как повысить,
так и понизить запас устойчивости по
модулю (удалить или приблизить АФХ к
критической точке на комплексной
плоскости
![]() ).
).
Введение производной повышает быстродействие САУ.
Действительно,
пусть
![]() .
Тогда, подобрав
.
Тогда, подобрав
![]() ,
,
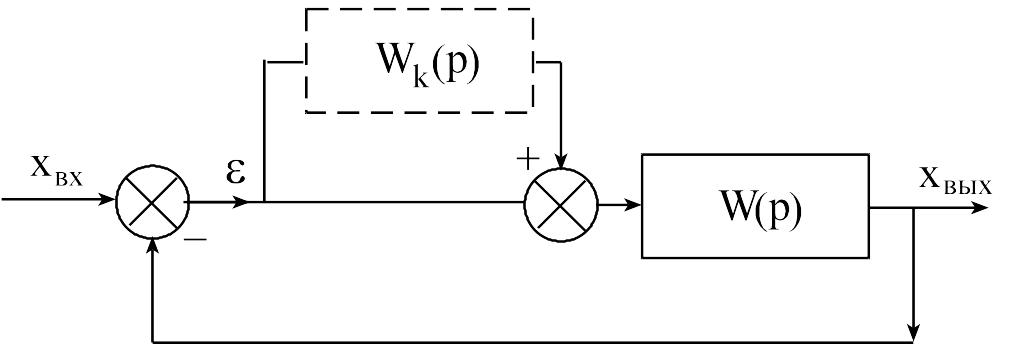
Рисунок 8.1 - Структурная схема инвариантной САУ
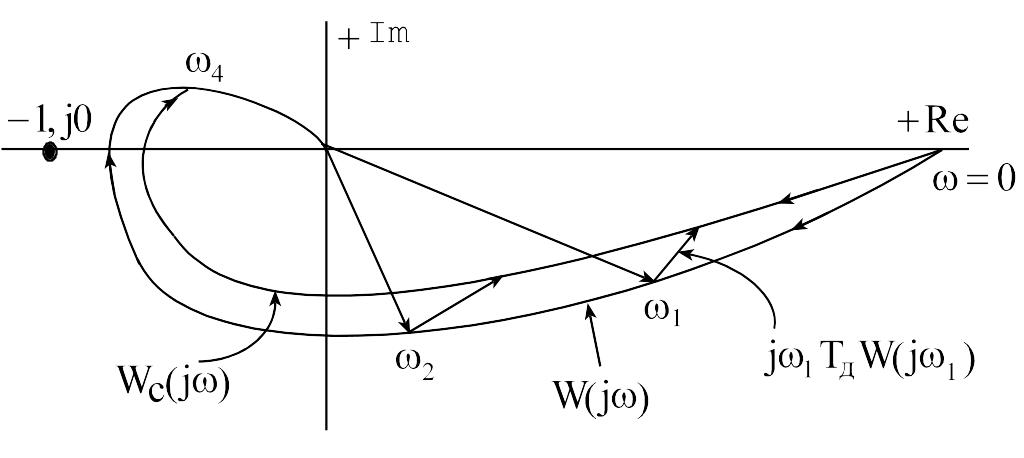
Рисунок 8.2 - АФХ исходной САУ и при введении производной
получим систему, на выходе мгновенно воспроизводящую входной сигнал. Передаточная функция замкнутой системы:
 .
.
В итоге система превращается в усилительное звено, мгновенно воспроизводящее во времени и по форме входной сигнал.
Для системы с
![]() после коррекции получаем
после коррекции получаем
![]() .
Характеристическое уравнение замкнутой
САУ:
.
Характеристическое уравнение замкнутой
САУ:
![]() .
Условие устойчивости по Гурвицу
.
Условие устойчивости по Гурвицу
![]() .
.
Предельное значение
![]() ,
при котором исходная система приходит
к границе устойчивости:
,
при котором исходная система приходит
к границе устойчивости:
![]() .
Для скорректированной САУ
.
Для скорректированной САУ
![]() ,
т.е.
,
т.е.
![]() .
Это позволяет увеличить коэффициент
усиления разомкнутой системы и таким
образом, снизить статическую погрешность
САУ.
.
Это позволяет увеличить коэффициент
усиления разомкнутой системы и таким
образом, снизить статическую погрешность
САУ.
8.2 Введение интеграла в закон регулирования
Пусть на рисунке
8.1 в качестве корректирующего звена
используется интегрирующее с
![]() .
Тогда передаточная функция разомкнутой
скорректированной системы
.
Тогда передаточная функция разомкнутой
скорректированной системы
![]() .
.
Введение корректирующего интегрирующего звена деформирует АФХ разомкнутой системы:
![]()
К каждому вектору
исходной АФХ
![]() добавляется вектор
добавляется вектор
![]() ,
который направлен вод углом 90° по часовой
стрелке по отношению к основному. Кроме
того, величина его тем больше, чем меньше
.
Как видно из рисунка 8.3, наличие
интегрирующего звена в законе
управления всегда деформирует АФХ
исходной системы в сторону ее разбухания.
,
который направлен вод углом 90° по часовой
стрелке по отношению к основному. Кроме
того, величина его тем больше, чем меньше
.
Как видно из рисунка 8.3, наличие
интегрирующего звена в законе
управления всегда деформирует АФХ
исходной системы в сторону ее разбухания.
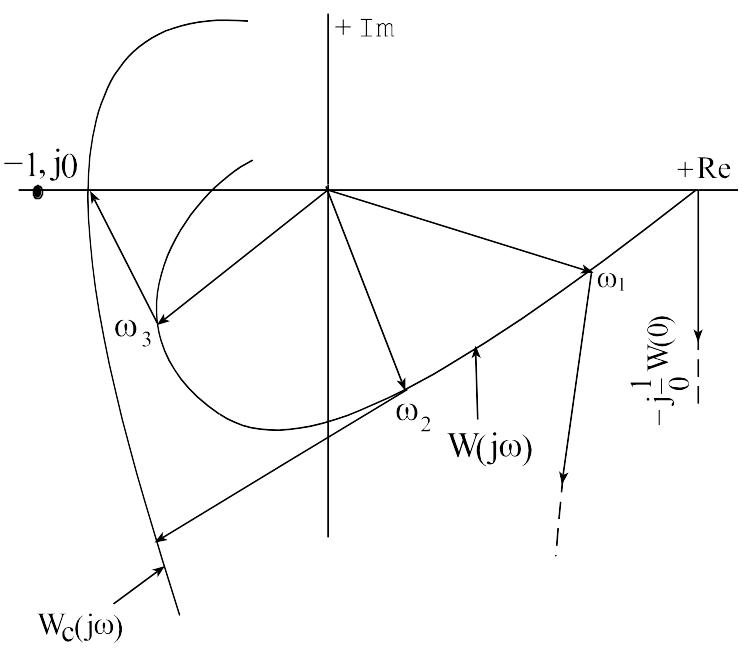
Рисунок 8.3 - АФХ исходной САУ при введении интеграла
При этом запас устойчивости САУ по модулю и фазе уменьшается.
Для выяснения
влияния интегрирующей составляющей на
статическую погрешность обратимся
опять к рисунку 8.1. Здесь статическая
погрешность
![]() .
Передаточная функция замкнутой САУ
между
.
Передаточная функция замкнутой САУ
между
![]() и входным сигналом
и входным сигналом
![]() - для не скорректированной системы.
- для не скорректированной системы.
![]() Пусть
Пусть
![]() ,
тогда
,
тогда
![]() (8.2)
(8.2)
Для скорректированной системы

Предположив, как и
в первом случае
![]() ,
получим
,
получим
 (8.3)
(8.3)
Введение интегральной составляющей исключает статическую ошибку регулирования.
Введение звеньев в цепь прохождения основного сигнала называется последовательной коррекцией. Она проста, но чувствительна к помехам и требует дополнительных усилителей. Если корректирующее звено вводится в цепь обратной связи, то коррекция называется параллельной. Она уменьшает нестабильность и нелинейность характеристик отдельных элементов.
Питание цепей обратной связи осуществляется с выхода последующих элементов, имеющих большую мощность и не вызывает затруднений. Высокочастотная составляющая фильтруется звеньями прямой связи, поэтому параллельная коррекция нечувствительна к помехам. Однако она требует применения громоздких устройств (трансформаторы, тахогенераторы и т.д.).
8.3 Создание инвариантных САУ
Основоположником теории инвариантности является В.Г. Щипанов, опубликовавший свою первую работу в 1939 году. Однако она подверглась резкой критике многих ученых (Н.Н.Вознесенского, А.В.Михайлова, Е.Л.Николаи, Ф.Ф.Гантмахера). Расхождение во взглядах ученых основывалось на том, что они смешивали две различные постановки задачи. В.Г. Щипанов решал задачу об устранении вынужденной составляющей отклонения регулируемой величины, а в критических работах рассматривалась задача о тождественном равенстве нулю общего решения, т.е. суммы свободной и вынужденной составляющей.
В настоящее время существует три направления создания инвариантных САУ:
1. Системы с одной регулируемой величиной, работающие по отклонению. В таких системах условие абсолютной инвариантности достигается при коэффициенте усиления разомкнутой САУ равном бесконечности.
2. Создание комбинированных систем.
3. Использование принципа двухканальности Б.Н. Петрова в многосвязных системах.
САУ называется инвариантной по отношению к возмущающему воздействию, если после завершения переходного процесса, определяемого начальными условиями, регулируемая величина и ошибка системы не зависят от этого воздействия.
САУ называется инвариантной по отношению к задающему воздействию, если после завершения переходного процесса, определяемого начальными условиями, ее ошибка не зависит от этого воздействия.
При нулевых
начальных условиях
![]()
где
- передаточная функция САУ,
![]()
В соответствии с правилами определения оригинала функции при отсутствии кратных корней
![]() (8.4)
(8.4)
где
![]() - корни полинома
- корни полинома
![]() ;
;
![]() - корни полинома
- корни полинома
![]() .
.
Вынужденная составляющая будет тождественно равна нулю, если:
![]() - входное воздействие
отсутствует;
- входное воздействие
отсутствует;
![]() - условие абсолютной
инвариантности (равенство нулю
передаточной Функции замкнутой САУ
по отношению к возмущающему воздействию).
- условие абсолютной
инвариантности (равенство нулю
передаточной Функции замкнутой САУ
по отношению к возмущающему воздействию).
Корни
![]() совпадают с корнями и
совпадают с корнями и
![]() и сомножители, соответствующие им,
можно сократить. Этот случай соответствует
частичной инвариантности, когда САУ
будет инвариантна только к определенному
виду возмущений.
и сомножители, соответствующие им,
можно сократить. Этот случай соответствует
частичной инвариантности, когда САУ
будет инвариантна только к определенному
виду возмущений.
Под частичной инвариантностью (до ) понимается не тождественное равенство нулю вынужденной составляющей, а приближенное, мерой выполнения которого является некоторая величина .
8.4 Создание комбинированных САУ
Основным методом, используемым при создании инвариантных систем, является применение комбинированного управления, при котором управляющее воздействие реализуется не только по отклонению регулируемой величины, но и по возмущению, для этого измеряется основное возмущающее воздействием и сигнал через корректирующее звено вводится в САУ.
При этом реализуется принцип двухканальности и не возникает противоречия между устойчивостью и инвариантностью, как это имеет место в одноконтурных системах, реализующих условие инвариантности за счет повышения коэффициента усиления системы. Введение сигнала по задающему или возмущающему воздействиям (рисунок 8.4,8.5) позволяет получить абсолютную инвариантность САУ. В терминах передаточных функций ранее данные определения инвариантности можно сформулировать следующим образом:
САУ инвариантна к задающему воздействию, если ее передаточная функция по отношению к нему равна единице;
САУ инвариантна к возмущающему воздействию, если ее передаточная функция по отношению к нему равна нулю.
Условия реализации абсолютной инвариантности легко проследить на примерах (рисунок 8.4,8.5).
Для системы
(рисунок 8.4)
![]()
Отсюда
![]() (8.5)
(8.5)
Для системы (8.5):
 (8.6)
(8.6)
Введение дополнительных воздействий не изменяет характеристического уравнения замкнутой САУ, поскольку корректирующие звенья не входят в замкнутый контур прохождения сигнала. При этом не будет нарушаться не только устойчивость САУ, но и сохраняться оценки качества переходного процесса, базирующиеся на использовании корней характеристического уравнения.
Однако при создании
инвариантных САУ очень остро возникает
вопрос физической реализуемости
![]() .
Поскольку для физической реализации
передаточной функции
.
Поскольку для физической реализации
передаточной функции
 необходимо, чтобы
необходимо, чтобы
![]() ,
то при реализации условия абсолютной
инвариантности
,
то при реализации условия абсолютной
инвариантности
![]() сталкиваются с затруднениями реализации
производных. Например, если
сталкиваются с затруднениями реализации
производных. Например, если
![]() Это звено физически
реализуемо,
Это звено физически
реализуемо,
![]() .
Это реальное дифференцирующее звено.
.
Это реальное дифференцирующее звено.
При
![]()
Если регулятор обладает астатизмом -го порядка, то должно реализовать производную -го и выше порядков и не иметь производных до порядка, что физически невозможно реализовать.
В этом случае реализуется частичная инвариантность за счет замены идеальных дифференцирующих звеньев реальными.
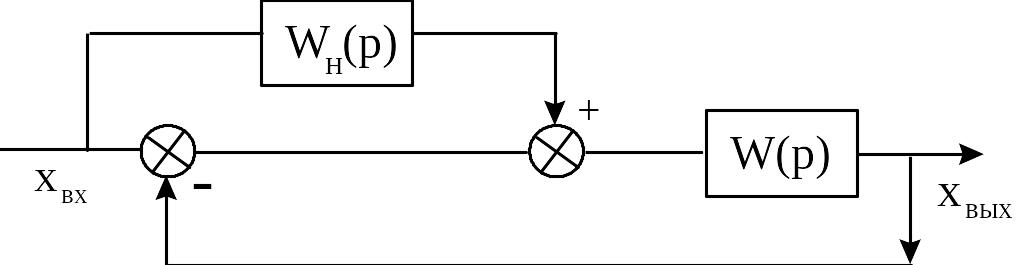

Рисунок 8.4 - Реализация инвариантности по заданию САУ
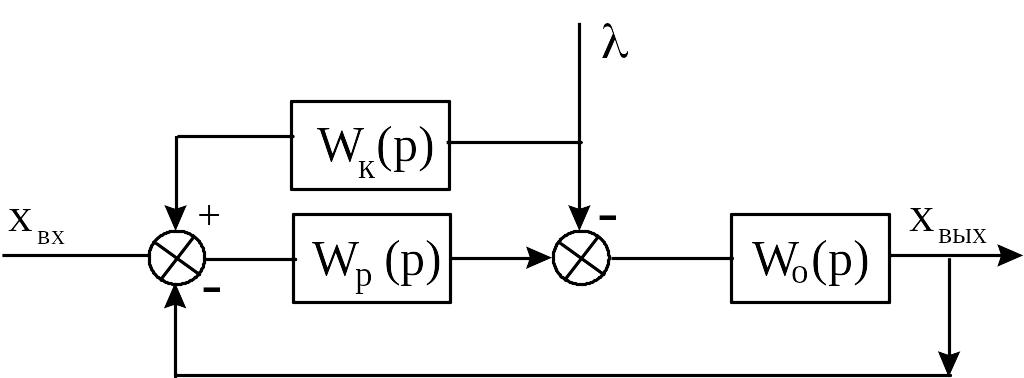
Рисунок 8.5 - Реализация инвариантности по возмущению САУ
Можно реализовать инвариантность по нескольким возмущениям, но это практически сложно.
Для САУ, описываемых дифференциальными уравнениями 1-го и 2-го порядка, когда необходимое условие устойчивости (положительность коэффициентов характеристического уравнения) является и достаточным, можно корректирующие звенья не устанавливать, а увеличивать коэффициент усиления разомкнутой САУ. При этом (рисунок 8.4):
![]()
Коэффициент
усиления разомкнутой САУ равен
![]() .
Для того, чтобы САУ была инвариантна к
задающему воздействию, необходимо,
чтобы
.
Для того, чтобы САУ была инвариантна к
задающему воздействию, необходимо,
чтобы
![]() .
Это отношение будет стремиться к единице
при
.
Это отношение будет стремиться к единице
при
![]() .
При этом САУ будет инвариантна и к
возмущающему воздействию (рисунок 8.5).
.
При этом САУ будет инвариантна и к
возмущающему воздействию (рисунок 8.5).
![]()
Если
![]()
8.5 Многомерные автоматические системы
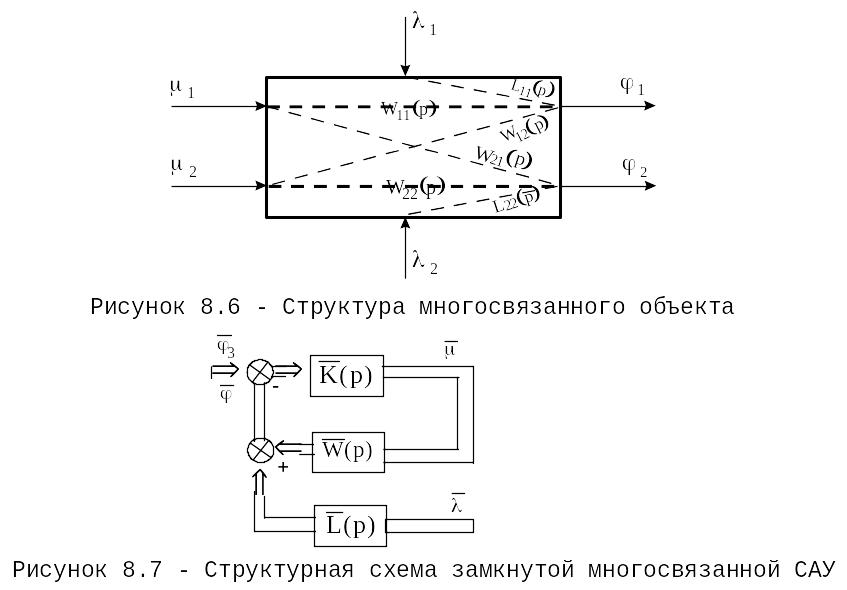
Принципиальной особенностью многомерных автоматических систем (MAС) является наличие перекрестных межконтурных связей. Связи осуществляются как через моменты САУ, так и через внутренние каналы в объекте регулирования, имеющем несколько регулируемых величин (давления, температура, концентрация и т.д.).
Структурная схема объекта с двумя связанными регулируемыми величинами изображена на рисунке 8.6.
Связь выходных и входных величин можно представить с помощью передаточной матрицы.
В матричной форме уравнение объекта записывается так:
![]() ,
(8.7)
,
(8.7)
Как видно из рисунка 8.6 и уравнения (8.7), каждой регулируемой величине можно поставить в соответствие свой регулирующий орган и выявить прямые или сепаратные связи (каналы). Они обычно выделяются по признаку интенсивности воздействия или быстродействию. Каждый сепаратный канал образует совместно с регулятором свою сепаратную систему.
Канал воздействия, берущий начало в одной сепаратной системе и приложенный к другой, называется перекрестной связью.
Перекрестные связи, существующие вследствие физических особенностей объекта или устройства, называются естественными. Искусственно вводимые перекрестные связи, служащие для придания МАС желаемых свойств, называются корректирующими. При этом связь называется прямой перекрестной, если сигнал передается в направлении прохождения основного сигнала, и обратной перекрестной связью, если сигнал передается против прохождения основного сигнала.
Матричное звено характеризует передачу воздействия в линейной динамической системе и отражает зависимость каждого выхода системы от каждого ее входа.
Совокупность входных сигналов образует вектор входа, выходных - вектор выхода.
Для многосвязного
регулятора входным вектором будет
![]() ,
выходным
,
выходным
![]() .
Уравнение регулятора в матричной форме
.
Уравнение регулятора в матричной форме
![]() .
(8.8)
.
(8.8)
Структурная схема замкнутой МАС изображена на рисунке 8.7.
Правила преобразования матричных структур имеют нормальное сходство с правилами преобразования обычных структурных схем, однако некоммутативностъ произведения матриц предопределяет некоторые особенности правил преобразования.
1. Передаточная матрица последовательно включенных звеньев равна их произведению в обратной последовательности.
2. Передаточная матрица параллельно включенных матриц равна их сумме. Суммировать можно только матрицы одного порядка, причем сумма обладает переместительным и сочетательным законом.
3. Для встречно-параллельно включенных звеньев (рисунок 8.7) запишем соотношения:
![]() ;
(8.9)
;
(8.9)
![]() .
(8.10)
.
(8.10)
Решая совместно уравнения (8.9) и (8.10), получаем
![]() или
или
![]() (8.11)
(8.11)
где
![]() - единичная матрица;
- единичная матрица;
![]() - характеристическая матрица замкнутой
многосвязной автоматической системы.
- характеристическая матрица замкнутой
многосвязной автоматической системы.
Для получения
передаточной матрицы МАС по задающему
и возмущающему воздействию необходимо
все слагаемые выражения (8.11) слева
домножить на
![]() .В
итоге получим
.В
итоге получим
![]()
Передаточная
матрица
![]() по задающему воздействие:
по задающему воздействие:
![]() (8.12)
(8.12)
Передаточная
матрица
![]() по возмущающему воздействию:
по возмущающему воздействию:
![]() (8.13)
(8.13)
Для обеспечения абсолютной инвариантности MAС необходимо добиться:
![]()
Иногда очень
желательной является независимость
регулируемых величин друг от друга,
т.е. изменение
регулируемой величины не приводило к
изменению каждой из «![]() »
регулируемых величин. Такой случай
инвариантности называется автономностью
по И.Н.Вознесенскому.
»
регулируемых величин. Такой случай
инвариантности называется автономностью
по И.Н.Вознесенскому.
Очевидно, что развязать контуры регулирования по задающим воздействиям можно, обеспечив диагональность передаточной матрицы . Условием автономности будет равенство нулю всех элементов этой матрицы, кроме диагональных.
Аналогично можно MAС сделать автономной по возмущающим воздействиям. Для этого необходимо, чтобы диагональной была матрица .
Если рассмотреть
,
то можно установить, что она может быть
диагональной только тогда, когда
![]() будет диагональной. В самом деле, если
матрица
диагональная, то диагональными будут
и матрицы
будет диагональной. В самом деле, если
матрица
диагональная, то диагональными будут
и матрицы
![]() ,
и, следовательно
.
,
и, следовательно
.
Таким образом, условие автономности МАС, разомкнутой по основным обратным связям, является необходимым и достаточным условием автономности замкнутой МАС по задающим воздействиям.
Благодаря наличию в МАС естественных перекрестных связей условия инвариантности можно добиться без введения дополнительных связей, принцип двухканальности здесь осуществляется структурой самой системы.
9 НЕЛИНЕЙНЫЕ СИСТЕМЫ
Линейная теория, используемая для анализа и синтеза линейных моделей систем управления, обычно бывает полезна на первой стадии исследований для приближенной оценки их качества и не может охватить всего многообразия движений, наблюдающихся в реальных системах.
В то время как линейная теория автоматического управления приобрела строгую законченную форму, теория нелинейных систем до сих пор остается предметом исследований многих российских и зарубежных ученых. Это объясняется тем, что многие явления, специфичные для нелинейных систем, не могут быть объяснены на основе общих методов исследования, и каждая задача требует индивидуального подхода. Поэтому для решения проблем нелинейной теории привлекается различный математический аппарат, тем не менее многие важные практические вопросы далеко не разрешены.
Можно утверждать, что практически все системы управления нелинейные. Но, допуская некоторые идеализации, их свойства в первом приближении могут быть описаны линейными дифференциальными уравнениями, что облегчает процесс исследования. Однако не все реальные звенья допускают линеаризацию обычным способом (разложением в ряд Тейлора, методом средних или методом наименьших квадратов) без потери при исследовании важнейших свойств системы. В этом случае одно или несколько звеньев системы описывается нелинейными зависимостями, а остальные нелинейными. Вся такая система относится к классу нелинейных и исследуется соответствующими методами, описанными ниже.
10.1 Основные типы нелинейностей
Существует множество разнообразных нелинейных описаний, поскольку к ним относится все, что чем-либо отличается от линейного (нелинейности в непрерывных системах с постоянными параметрами, с переменными во времени параметрами, в дискретных системах, системах с распределенными параметрами и т.д.).
Наиболее часто встречающиеся нелинейности можно классифицировать следующим образом.
Нелинейность
релейного типа, рисунок 9.1. Обозначив
через
![]() -выходную,
а через
-выходную,
а через
![]() - входную величину релейного элемента,
в общем случае можно записать
- входную величину релейного элемента,
в общем случае можно записать
|
(9.1) |
Рисунок 9.1 - Характеристики релейных элементов
На рисунке 9.1.а, изображена характеристика релейного элемента без среднего положения (двухпозиционного), а на рисунке 9.1,б трехпозиционного (со средним положением). Связь выходной и входной величин для них следующая: для 9.1,а -
|
(9.2) |
для 9.1,б
|
(9.3) |
Релейный элемент
может иметь зону нечувствительности
![]() (рисунок 9.1,д). Тогда
(рисунок 9.1,д). Тогда
|
(9.4) |
Если коэффициент
возврата релейного элемента
![]() не равен единице, рисунок 9.1,г, то
характеристика оказывается неоднозначной,
не равен единице, рисунок 9.1,г, то
характеристика оказывается неоднозначной,
|
(9.5) |
Релейный элемент
может иметь положительный гистерезис,
рисунок 9.1.в, и отрицательный гистерезис,
рисунок 9.1,е. Особенность релейных
элементов с гистерезисом в том, что
уравнение, описывающее связь между
выходной величиной и входной, включает
параметр
![]() ,
характеризующий состояние релейного
элемента после последнего переключения.
,
характеризующий состояние релейного
элемента после последнего переключения.
Для описания релейного
элемента с отрицательным гистерезисом,
рисунок 9.1,е, необходимо знать не только
величину входного сигнала, но и скорость
его изменения. Обозначим
![]() ,тогда
,тогда
|
(9.6) |
Характеристики релейных элементов могут быть несимметричными, или релейно-импульсными, когда при превышении некоторого уровня входного сигнала подается импульс определенной длительности, а в случае превышения другого уровня - импульс другой длительности и т.д. При достижении входным сигналом больших величин включается релейный элемент, подающий сигнал постоянной величины.
Нелинейности непрерывных статических характеристик, рисунок 9.2.
Рисунок 9.2 - Статические нелинейности
Они записываются в форме (9.1) и могут задаваться аналитически в виде степенных и других функций. Характеристика с насыщением изображена на рисунке 9.2,а, с нечувствительностью и насыщением на рисунке 9.2,б, с петлей гистерезиса - на рисунке 9.2,в, с зазором - на рисунке 9.2,г.
Динамические нелинейности, которые описываются нелинейными дифференциальными зависимостями. Примером может служить нелинейное введение производной наряду с самой величиной, изменение постоянной времени в зависимости от входной величины, нелинейное трение.
Нелинейность
переменной структуры, связанная с
изменением значения переменной
![]() .
В этом случае система, состоящая из
линейных звеньев, создает нелинейное
устройство, реализующее определенную
функцию переключения
.
В этом случае система, состоящая из
линейных звеньев, создает нелинейное
устройство, реализующее определенную
функцию переключения
![]() ,
которая, например, будет равна
,
которая, например, будет равна
|
(9.7) |
Нелинейности логического типа, когда элемент, имеющий несколько входов, выдает ступенчатый сигнал (1,0,-1) в зависимости от определенных логических комбинаций свойств входных величин.
Релейные автоматические системы
Релейные системы относятся к наиболее простому классу нелинейных систем, поскольку благодаря специфике релейного элемента, создающего воздействия на линейную часть системы в виде прямоугольных импульсов постоянной высоты, исследование их сводится к исследованию линейной части, подверженной указанным импульсам.
Управляющее воздействие, приложенное к линейной части системы, можно представить в виде суммы воздействий простейшего вида, а реакцию линейной части найти, применив принцип суперпозиции, как сумму реакции на каждое из них.
Релейные системы, отличаясь простотой, имеют иногда лучшие динамические свойства, чем другие. Создание бесконтактных релейных элементов, допускающих изменение параметров, позволяет придавать системе новые свойства. Поскольку при наличии рассогласования между заданным и действительным значением регулируемой величины управляющее воздействие всегда будет максимальным, то, естественно, быстродействие системы станет большим, однако в ней возникнут незатухающие колебания (автоколебания). Как правило, автоколебания нежелательны, но в некоторых системах они являются основным рабочим режимом.
Если на релейную систему подействовать периодическими воздействиями, то при определенных условиях (условия захватывания) ранее существующие в ней автоколебания устраняются, но при этом возникают вынужденные колебания с частотой, равной частоте внешнего воздействия.
При достаточно большой частоте вынужденные колебания будут иметь малую амплитуду, допустимую по технологическим требованиям.
Наличие автоколебаний ослабляет отрицательное влияние на динамику системы сухого трения, гистерезиса и придают ей свойства пропорциональности, линеаризуют ее.
Применяя внутренние обратные связи, можно получать скользящие режимы и строить на их основе частотно-импульсные системы.
Исследовать релейную систему удобнее, если отдельно выделять релейный элемент и линейную часть, а все возмущающие воздействия приводить к входу релейного элемента. В итоге получим структурную схему, представленную на рисунке 9.3, где обозначены в изображениях Лапласа
![]() -
возмущения, приведенные к входу релейного
элемента;
-
возмущения, приведенные к входу релейного
элемента;
![]() -
входная величина релейного элемента;
-
входная величина релейного элемента;
![]() -
выходная;
-
выходная;
![]() -регулируемая
величина.
-регулируемая
величина.
Для линейной части
|
(9.8) |
уравнение замыкания
|
(9.9) |
уравнение
релейного
элемента
|
(9.10) |
где
![]() - символ прямого преобразования Лапласа.
- символ прямого преобразования Лапласа.

Рисунок 9.3 - Структурная схема релейной системы
Исключая промежуточные
переменные
![]() и
и
![]() из системы уравнений (9.8), (9.9), (9.10),
получаем уравнением замкнутой
системы
из системы уравнений (9.8), (9.9), (9.10),
получаем уравнением замкнутой
системы
|
(9.11) |
или, если нас интересует регулируемая величина
|
(9.12) |
Как видно из уравнений
(9.11) и (9.12), их нельзя разрешить в явном
виде относительно
![]() и
и
![]() ,
поскольку они входят в качестве аргумента
нелинейной функции
,
поскольку они входят в качестве аргумента
нелинейной функции
![]() и, следовательно, не могут быть использованы
для построения переходного процесса
в релейной системе.
и, следовательно, не могут быть использованы
для построения переходного процесса
в релейной системе.
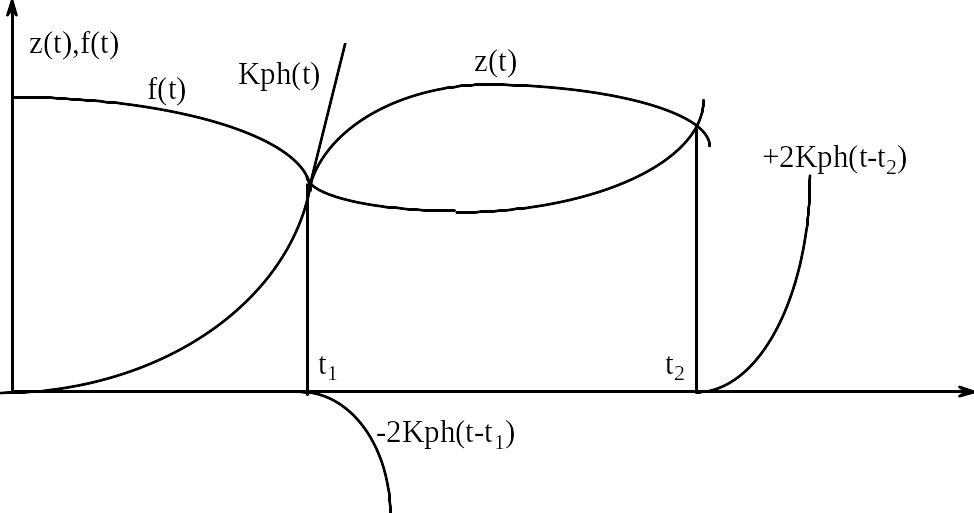
9.2 Построение переходных процессов в релейных системах
Линейная часть релейной системы подвержена воздействию прямоугольных импульсов постоянной высоты. Знак, длительность и расположение импульсов зависят от внешнего воздействия. На основании принципа наложения результирующую реакцию можно найти простым суммированием реакций системы на каждое воздействие порознь.
Для определенности
всегда будем считать, что управляющий
сигнал
![]() впервые проходит пороговое значение,
уменьшаясь, т.е.
впервые проходит пороговое значение,
уменьшаясь, т.е.
![]() (рисунок 9.4).
(рисунок 9.4).
Под пороговым
значением управляющего сигнала понимают
такое значение, при котором выходная
величина релейного элемента всякий раз
изменяется скачком. Например, для
релейного элемента, изображенного на
рисунке 9.1,д, пороговое значение
![]() ,
для рисунков 9.1,а и 9.1,б
,
для рисунков 9.1,а и 9.1,б
![]() .
.
Условие
![]() позволяет выбирать знак неравенства
условия надлежащего направления
переключения.
позволяет выбирать знак неравенства
условия надлежащего направления
переключения.
Рассмотрим систему с релейным элементом (рисунок 9.1,а) без гистерезиса и зоны нечувствительности (идеальным релейным элементом ).
Рисунок 9.4 - Графики входного и выходного сигналов релейного элемента
Моменты переключения
(![]() ...)
есть те моменты, в
...)
есть те моменты, в
которые x(t) проходит пороговые значения, т.е. эти моменты являются корнями уравнения
![]() .
(9.13)
.
(9.13)
Условие (9.13) есть условие надлежащих моментов переключения. Кроме того, для последовательного чередования направлений переключений необходимо, чтобы выполнялось условие
![]() (9.14)
(9.14)
или
![]() (9.15)
(9.15)
Условия (9.14) и (9.15) называются условиями надлежащих направлений переключения.
Изображения любого из прямоугольных импульсов можно записать так:
![]() (9.16)
(9.16)
где
![]()
![]() - значение амплитуды
прямоугольного импульса на выходе
релейного элемента.
- значение амплитуды
прямоугольного импульса на выходе
релейного элемента.
Изображение управляющего воздействия есть сумма изображений всех импульсов
|
|
Следовательно,
|
(9.17) |
Поскольку
|
|
где
![]() -
символ обратного преобразования Лапласа,
-
символ обратного преобразования Лапласа,
![]() -
переходная функция линейной части
системы,
-
переходная функция линейной части
системы,
то и
|
(9.18)
|
Принимая во внимание (10.18) из выражения (10.17), получаем
|
(9.19) |
Итак, для отдельных участков переходного процесса на основании (10.19) получаем
|
|
Легко заметить, что
выражение для
![]() можно записать в виде:
можно записать в виде:
![]() (9.20)
(9.20)
Из выражений (9.18),
(9.19), (9.20) следует, что для построения
переходного процесса в релейной системе
необходимо иметь переходную характеристику
линейной части системы и знать моменты
переключения
![]() .
Поскольку априори
неизвестна, то аналитически вычислить
нельзя. Наиболее простой способ
нахождения
- это графический.
.
Поскольку априори
неизвестна, то аналитически вычислить
нельзя. Наиболее простой способ
нахождения
- это графический.
Если на графике
изобразить
![]() и нанести функцию
и нанести функцию
![]() (рисунок 10.5), то точка их пересечения
даст значение
(рисунок 10.5), то точка их пересечения
даст значение
![]() .
Начиная с момента
, откладываем величину
.
Начиная с момента
, откладываем величину
![]() и складываем ее с
так, что при t1<t<t2
получаем
и складываем ее с
так, что при t1<t<t2
получаем
![]() .
Абсцисса точки пересечения
.
Абсцисса точки пересечения
![]() с
с
![]() даст значение t2
и т.д. Продолжая указанную последовательность
действий, строим переходный процесс в
системе при заданном входном воздействии.
даст значение t2
и т.д. Продолжая указанную последовательность
действий, строим переходный процесс в
системе при заданном входном воздействии.
Рисунок
9.5 - Графический способ определения
![]()
Если релейный элемент имеет гистерезис (рисунок 10.1,в), то условие надлежащих моментов переключения будет таким:
|
(9.21) |
a условие надлежащих направлений переключения останется прежним (9.14).
Как видно из рисунка 9.6, последовательность импульсов, воздействующих на линейную часть, имеет прежний вид, поэтому и выражение для вычисления выходной величины системы остается прежним.
Если характеристика релейного элемента смещена (рисунок 9.7), то можно считать, что к линейной части дополнительно приложено постоянное возмущение
![]() (9.22)
(9.22)
Для релейного элемента с зоной нечувствительности и гистерезисом (рисунок 9.1,г) условия надлежащих моментов переключения принимают вид (рисунок 9.8):
Рисунок 10.6 - Последовательность управляющих импульсов при наличии зоны нечувствительности
Рисунок 10.7 - Характеристика реле со смещением
Рисунок 9.8 - Характеристика управляющих воздействий при наличии зоны нечувствительности и гистерезиса
|
(9.23) |
а условия надлежащих направлений
|
(9.24) |

Как следует из
рисунка 9.8, в данном случае форма
прямоугольных импульсов, действующих
на линейную часть системы, изменяется
по сравнению с ранее рассмотренной. В
промежутки времени от
![]() до
отсутствует воздействие на линейную
часть.
до
отсутствует воздействие на линейную
часть.
Если рассуждать таким же образом, как и в предыдущих случаях, то можно записать выражения для выходной величины системы в следующем виде:
|
(9.25) |

и
|
(9.26) |

Выражение (9.25) соответствует наличию управляющего воздействия на систему, а выражение (9.26) - отсутствию управляющего воздействия.
Рассмотренный метод построения переходных процессов может быть использован только в том случае, если заданы численные значения параметров релейного элемента и линейной части системы. Он применим к системам с распределенными параметрами, запаздыванием и т.д., если найдена каким-либо способом переходная характеристика линейной части. Однако этот метод не дает возможности найти общие условия устойчивости и возникновения различных режимов, существующих в релейных системах.
При машинном методе построения переходных процессов непрерывную часть системы следует представить в виде системы дифференциальных уравнений первого порядка (в форме Коши). Релейную характеристику описывают системой логических выражений, соответствующих условиям (9.2 - 9.6), которые необходимо дополнить уравнением замыкания .
9.3 Устойчивость нелинейных систем
Основополагающей работой в этой области является работа А.М. Ляпунова (1892) "Общая задача об устойчивости движения". Однако наибольшее значение для исследования устойчивости нелинейных систем имеет так называемый второй (прямой) метод Ляпунова, основанный на использовании некоторой функции, называемой функцией Ляпунова. В своей работе он указал способ построения такой функции лишь для линейных систем. Для нелинейных систем общего метода определения функции Ляпунова нет, поэтому можно подобрать несколько функций, каждая из которых даст свои условия устойчивости, т.е. второй метод Ляпунова позволяет получить лишь достаточные условия устойчивости. Сложность метода не позволяла его использовать почти 60 лет.
В настоящее время существует большое число различных определений понятия устойчивости. Это прежде всего понятие асимптотической и абсолютной устойчивости (А.И. Лурье, В.Н. Постников,1945 г.) устойчивости в малом, большом, целом (Я.3.Цыпкин, В.М. Попов - румынский ученый, 1959 г.); технической или практической устойчивости на конечном интервале времени (К.А. Карагаров, А.Г.Пилютин.1962г.); устойчивость по Лагранжу (Ж.П.Ла-Салль,С.Лефшец,1964 г.), условной устойчивости (Ж.П.Ла-Салль,1964 г.) гиперустойчивости (В.М.Попов,1960 г.).
В настоящее время существуют аналитические и частотные методы исследования нелинейных систем. Сложность аналитического исследования привели к разработке критериев (Я.3.Цыпкина, В.М. Попова) позволяющих упростить решение задачи.
Общие положения об устойчивости нелинейных систем
При отсутствии возмущающих воздействий уравнения динамики для нелинейной системы -го порядка в общем виде в нормальной форме Коши имеют вид:
![]() (9.27)
(9.27)
Пусть
![]() есть невозмущенное движение системы,
а
есть невозмущенное движение системы,
а
![]() - отклонение возмущенного состояния
системы, тогда
- отклонение возмущенного состояния
системы, тогда
![]() (9.28)
(9.28)
где
![]() - возмущенное движение системы,
определяемое уравнениями (9.27) при
определенных начальных условиях
- возмущенное движение системы,
определяемое уравнениями (9.27) при
определенных начальных условиях
![]() .
.
Уравнение возмущенного движения в отклонениях запишется в виде:
![]() (9.29)
(9.29)
В общем случае вид уравнений (10.29) зависит от вида установившегося процесса , поскольку (9.29) получается из (9.27) подстановкой (9.28). Это могут быть гармонические колебания, линейная временная функция и т.д.
Невозмущенное
движение
![]() называется устойчивым, если задав
"трубку"
называется устойчивым, если задав
"трубку"
![]() -мерного сечения
,
можно подобрать в начальный момент
-мерного сечения
,
можно подобрать в начальный момент
![]() такую область начальных условий ,
зависящую от ,
что с увеличением
такую область начальных условий ,
зависящую от ,
что с увеличением
![]() возмущенное движение не выйдет из
заданной трубки .
возмущенное движение не выйдет из
заданной трубки .
Невозмущенное
движение
![]() будет неустойчивым, если указанное
условие не выполняется хотя бы для
одного
будет неустойчивым, если указанное
условие не выполняется хотя бы для
одного
![]() .
.
Если условия
определения выполнены и
![]() при
при
![]() то невозмущенное движение называется
асимптотически устойчивым.
то невозмущенное движение называется
асимптотически устойчивым.
Если же при после любых начальных отклонений, то система называется устойчивой в целом.
Абсолютно устойчивой называют асимптотически устойчивую систему в целом внутри определенного класса нелинейностей.
Таким образом, в отличие от линейных систем, устойчивость нелинейных определяется величиной возмущающего воздействия (отклонения координат состояния).
Функция Ляпунова
Знакоопределенной
функцией называется такая, которая во
всей рассматриваемой области, содержащей
начало координат, сохраняет один и тот
же знак и обращается в нуль только в
начале координат. Она может быть
положительно определенной
![]() или отрицательно определенной. Функция
называется знакопостоянной, если
имеет один и тот же знак, но обращается
в нуль не только в начале координат,
например:
или отрицательно определенной. Функция
называется знакопостоянной, если
имеет один и тот же знак, но обращается
в нуль не только в начале координат,
например:
![]()
Знакопеременной называется функция, не сохраняющая знака в рассматриваемой области.
Согласно критерию Сильвестра любая квадратичная форма будет знакоопределенной (положительно), когда все главные диагональные миноры матрицы ее коэффициентов будут положительными.
Например:
|
|
![]() ,
обращающаяся в нуль в начале координат,
называется функцией Ляпунова, если
она знакоположительна.
,
обращающаяся в нуль в начале координат,
называется функцией Ляпунова, если
она знакоположительна.
Производная функции Ляпунова:
![]() (9.30)
(9.30)
Учитывая (10.29), можно записать:
![]() (9.31)
(9.31)
![]() также
является функцией координат системы.
также
является функцией координат системы.
Поскольку
![]() ,а
,а
![]() то
то
![]() (9.32)
(9.32)
т.е. производная функции Ляпунова по времени представляет собой скалярное произведение градиента этой функции на вектор фазовой скорости.
Скалярным произведением
двух векторов называется
![]() ,
или, если векторы заданы в декартовых
координатах, то
,
или, если векторы заданы в декартовых
координатах, то
![]() и
и
![]()
Вектор grad
перпендикулярен
![]() и направлен в сторону возрастания .
Если
и направлен в сторону возрастания .
Если
![]() ,
то
,
то
![]() с вектором grad
составляет острый угол и фазовая
траектория пересекает
в сторону увеличения. Если
с вектором grad
составляет острый угол и фазовая
траектория пересекает
в сторону увеличения. Если
![]() ,
угол между grad
и
тупой, (косинус отрицательный) и
фазовая траектория идет в сторону
уменьшения
,
угол между grad
и
тупой, (косинус отрицательный) и
фазовая траектория идет в сторону
уменьшения
![]() .
Если для системы уравнений (9.29) существует
знакоопределенная функция
,
производная которой
.
Если для системы уравнений (9.29) существует
знакоопределенная функция
,
производная которой
![]() является знакопостоянной противоположного
знака, то решение системы
является знакопостоянной противоположного
знака, то решение системы
![]() устойчиво, если
устойчиво, если
![]() - знакоопределенная, то решение системы
будет устойчивым асимптотически.
Действительно, если
- знакоопределенная, то решение системы
будет устойчивым асимптотически.
Действительно, если
![]() ,
то фазовая траектория может остаться
на поверхности
.
Если же
,
фазовая траектория будет монотонно
убывающей и x(t)0
при
.
,
то фазовая траектория может остаться
на поверхности
.
Если же
,
фазовая траектория будет монотонно
убывающей и x(t)0
при
.
Пример:
|
|
Подставив
![]() и
и
![]() ,
имеем
,
имеем
|
При
![]() -
знакоопределенная отрицательная
функция. При этом
-
знакоопределенная отрицательная
функция. При этом
![]() остается положительной, следовательно
исходная нелинейная система асимптотически
устойчива.
остается положительной, следовательно
исходная нелинейная система асимптотически
устойчива.
9.4 Устойчивость релейных систем
При рассмотрении устойчивости релейных систем воспользуемся определением, приведенным Я.3.Цыпкиным. Это объясняется не только удобством формулировки (существует большое число различных определений понятия устойчивости), но и распространенностью релейных систем в классе нелинейных.
Нелинейная система
будет устойчивой, если для всякого
заданного числа
![]() можно найти такое число
можно найти такое число
![]() ,
что для всех исчезающих воздействий
,
что для всех исчезающих воздействий
![]() таких, что
таких, что
![]() входная величина нелинейного элемента
входная величина нелинейного элемента
![]() удовлетворяет неравенству
удовлетворяет неравенству
![]() для всех
для всех
![]() .
Если потребовать, чтобы
.
Если потребовать, чтобы
![]() то такая система называется асимптотически
устойчивой. Воздействие называется
исчезающим, если комбинация
то такая система называется асимптотически
устойчивой. Воздействие называется
исчезающим, если комбинация
![]() и
и
![]() абсолютно интегрируема, т.е.
абсолютно интегрируема, т.е.
![]() .
.
Это понятие асимптотической устойчивости несправедливо для нелинейных элементов с зоной нечувствительности. В этом случае следует считать положение равновесия устойчивым, если
![]()
где
![]() - любое значение, принадлежащее зоне
нечувствительности.
- любое значение, принадлежащее зоне
нечувствительности.
Итак, если на нелинейную систему действует ограниченное по модулю внешнее воздействие, то в асимптотически устойчивой системе существует вынужденное движение, ограниченное по модулю, и, кроме того, отклонение от вынужденного движения стремится к нулю с течением времени. Если условия асимптотической устойчивости выполняются при малых отклонениях от положения равновесия, то система устойчива в малом. Если условия устойчивости выполняются при любых конечных значениях (), то система устойчива в большом. И, наконец, если автоматическая система асимптотически устойчива при любых (), то она устойчива в целом.
Особенность нелинейных систем - в том, что система может быть асимптотически устойчивой в малом, но условия асимптотической устойчивости в большом могут не выполняться.
Невозможность получения решения в большинстве случаев для систем выше второго порядка привела к разработке методов нахождения достаточных условий устойчивости нелинейных систем без точного решения описывающих их уравнений.
При отсутствии зоны нечувствительности у нелинейного элемента его выходной сигнал стремится к нулю только тогда, когда частота переключений в системе неограниченно возрастает.
Для определения условия устойчивости нелинейной системы в малом рассмотрим наиболее тяжелый случай, когда нелинейный элемент имеет вид идеального реле. В этом случае нелинейную систему можно представить состоящей из линейной части и усилителя с бесконечным коэффициентом усиления. Для устойчивости такой системы необходимо, чтобы выполнялось условие устойчивости линейной системы при неограниченном возрастании ее коэффициента усиления.
Если на рисунке 10.3
предположить, что у нелинейного элемента
коэффициент усиления К,
а
![]() ,
то передаточная функция замкнутой
системы будет равна
,
то передаточная функция замкнутой
системы будет равна
|
Отсюда - характеристическое уравнение замкнутой системы
![]() (9.33)
(9.33)
Условием устойчивости нелинейной системы в малом является отрицательность действительных частей корней характеристического уравнения (9.33).
При
![]() получаем предельную систему,
характеристическое уравнение которой
получаем предельную систему,
характеристическое уравнение которой
![]() .
.
Найдем критерий
устойчивости нелинейных систем,
позволяющий по
![]() или
или
![]() линейной части судить об устойчивости
замкнутой системы в малом. Для этого
воспользуемся
линейной части судить об устойчивости
замкнутой системы в малом. Для этого
воспользуемся
![]() - разбиением по основному параметру
- разбиением по основному параметру
![]() .
.
Полагая в уравнении
(9.30)
![]() ,
получаем
,
получаем
![]() .
.
Для устойчивости
системы необходимо, чтобы при больших
![]() ,
включая
,
точка
принадлежала отрезку устойчивости,
который представляет собой отрезок
вещественной оси на комплексной
плоскости, находящийся в заштрихованной
области. На комплексной плоскости
штрихуется область, расположенная слева
от
при возрастании .
Поскольку
,
включая
,
точка
принадлежала отрезку устойчивости,
который представляет собой отрезок
вещественной оси на комплексной
плоскости, находящийся в заштрихованной
области. На комплексной плоскости
штрихуется область, расположенная слева
от
при возрастании .
Поскольку
![]() велико, то нас интересует поведение
только при больших значениях .
Если разложить
по степеням
велико, то нас интересует поведение
только при больших значениях .
Если разложить
по степеням
![]() ,
т.е.
,
т.е.
![]() (9.34)
(9.34)
то поведение ее при
больших
определяется первыми членами разложения.
![]() приближается к нулю по прямой под углом
приближается к нулю по прямой под углом
![]() к
действительной оси.
к
действительной оси.
На рисунке 9.9
изображены различные варианты
при различных знаках
![]() ,
а также различных индексах передаточной
функции линейной части системы l,
под которым понимается разность степеней
полиномов знаменателя и числителя
,
а также различных индексах передаточной
функции линейной части системы l,
под которым понимается разность степеней
полиномов знаменателя и числителя
![]() :
:
![]()
Рисунок 10.9 - Вид АФХ линейной части при различных индексах
При этом предполагается,
что
![]() ,
поскольку
,
поскольку
![]() всегда соответствует неустойчивости.
всегда соответствует неустойчивости.
Анализ изображенных
на рисунке 9.9 кривых показывает, что
если предельная система устойчива, то
и линейная система при
![]() будет устойчивой, но лишь при
будет устойчивой, но лишь при
![]() и
.
Линейная система при
стремится к границе устойчивости при
и
.
Линейная система при
стремится к границе устойчивости при
![]() и
и , причем, когда
- велико, то линейная система будет
устойчивой при
и неустойчивой при
.
и
и , причем, когда
- велико, то линейная система будет
устойчивой при
и неустойчивой при
.
Линейная система
будет заведомо неустойчивой при
,
если
![]() .
.
Коэффициенты
![]() и
и
![]() легко найти через коэффициенты
передаточной функции линейной части
системы.
легко найти через коэффициенты
передаточной функции линейной части
системы.
|
(9.35) |
Разложив
![]() по отрицательным степеням
,
получим
по отрицательным степеням
,
получим
|
(9.36) |
Производя перемножение
в правой части, а затем приравнивая
коэффициенты при одинаковых степенях
![]() слева и справа, получаем
слева и справа, получаем
|
(9.37) |
Из системы алгебраических уравнений (9.37) по правилу Крамера находим коэффициенты
![]() (9.38)
(9.38)
где
![]() - определитель,
полученный из правой части уравнения
(9.37) заменой столбца с коэффициентами
- определитель,
полученный из правой части уравнения
(9.37) заменой столбца с коэффициентами
![]() на столбец левой части системы. Поскольку
нас интересуют только два коэффициента
и
,
то из их первых двух уравнений (9.37) найдем
на столбец левой части системы. Поскольку
нас интересуют только два коэффициента
и
,
то из их первых двух уравнений (9.37) найдем
|
(9.38) |
Коэффициенты и можно легко определить, если использовать следующий прием:
|
(9.39) |
Пусть
![]() ,
тогда
,
тогда
![]() (9.40)
(9.40)
Если
![]() ,
то
,
то
![]() (9.41)
(9.41)
Итак, релейная автоматическая система будет устойчивой в малом в том случае, если нули передаточной функции находятся в левой полуплоскости комплексной плоскости, а индекс передаточной функции не превышает двух, причем
при
![]()
![]() ;
;
при
![]() ;
;
![]() .
.
Устойчивость предельной системы (нули передаточной функции линейной части находятся в левой полуплоскости комплексной плоскости) может быть исследована любым из известных критериев устойчивости линейных систем (Гурвица, Михайлова).
9.5 Условия устойчивости нелинейной системы « в целом »
Часто в системах регулирования нелинейная характеристика не может быть точно задана или изменяться в процессе работы (например, характеристика регулирующего органа при изменении давления в питающей сети, трения в сальнике и т.д.). В таких случаях, задаваясь лишь главными свойствами нелинейности, можно найти достаточные условия асимптотической устойчивости в большом или целом.
А.M. Летовым введено
определение функций класса
![]() ,
обладающих следующими свойствами:
,
обладающих следующими свойствами:
![]() -
непрерывная функция,
-
непрерывная функция,
|
(9.42) |
Этому определению
удовлетворяют функции произвольной
формы. Использовав этот подход, можно
выделить класс нелинейных функций
![]() ,
когда характеристика нелинейного
элемента лежит внутри сектора,
ограниченного прямыми линиями
,
когда характеристика нелинейного
элемента лежит внутри сектора,
ограниченного прямыми линиями
![]() и
и
![]() рисунок 9.10
рисунок 9.10
![]() .
(9.43)
.
(9.43)
Если лежит в ограниченном секторе и принадлежит классу , то асимптотическую устойчивость системы называют абсолютной устойчивостью (А.И. Лурье, В.Н. Постников).
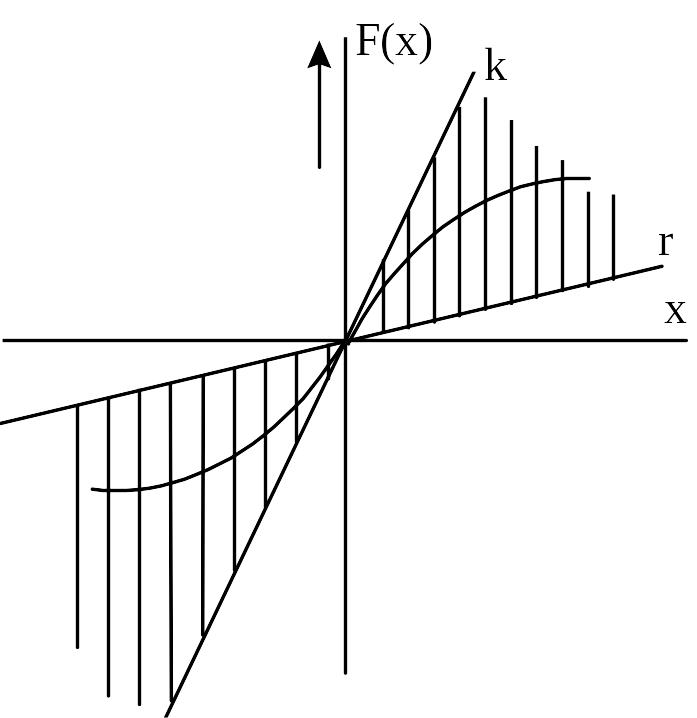
Рисунок 9.10 - График нелинейности класса
Если
![]() и
и
![]() ,
то говорят об абсолютной устойчивости
в большом или некоторой области.
,
то говорят об абсолютной устойчивости
в большом или некоторой области.
Работы В.М Попова
стали основополагающими при исследовании
абсолютной устойчивости нелинейных
систем частотными методами. В.М. Попов
доказал, что для абсолютной устойчивости
положения равновесия нелинейной
системы, состоящей из нелинейного
элемента с характеристикой
,
удовлетворяющей условиям (10.42) и
устойчивой или нейтральной линейной
частью, достаточно, чтобы при
![]() существовало такое действительное
число
,
при котором для всех
существовало такое действительное
число
,
при котором для всех
![]() выполнялось бы неравенство
выполнялось бы неравенство
![]() (9.44)
(9.44)
Я.3.Цыпкин обобщил этот критерий и распространил на системы с релейными характеристиками (разрывными). Он доказал, что для устойчивости релейной системы в целом достаточно, чтобы линейная часть системы была устойчива или нейтральна, а частотная характеристика и параметры релейного элемента удовлетворяли бы условию
![]() (9.45)
(9.45)
где
![]() - при положительном гистерезисе;
- при положительном гистерезисе;
![]() - при отрицательном
гистерезисе.
- при отрицательном
гистерезисе.
Этому критерию можно дать простую геометрическую интерпретацию. Пусть
![]() .
(9.46)
.
(9.46)
Тогда (10.45) перепишем в форме
![]() (9.47)
(9.47)
В плоскости параметров
![]() и
и
![]() выражение (10.47) для знака равенства
определяет прямую, проходящую через
точку
выражение (10.47) для знака равенства
определяет прямую, проходящую через
точку
![]() на оси абсцисс с наклоном, равным
на оси абсцисс с наклоном, равным
![]() .
Эта прямая называется прямой Попова и
делит плоскость
.
Эта прямая называется прямой Попова и
делит плоскость
![]() на две полуплоскости - правую и левую,
рисунок 9.11.
на две полуплоскости - правую и левую,
рисунок 9.11.
Рисунок
9.11 - Вид прямых Попова для
![]() и
и
![]()
Неравенство (9.45) соответствует точкам области, расположенной справа от этой прямой.
Введем понятие модифицированной частотной характеристики линейной части релейной системы
|
(9.48) |
где
|
|
Из выражения (9.46) видно, что для получения модифицированной частотной характеристики достаточно в обычной изменить масштаб мнимой части в каждой точке в раз.
Релейная система
будет устойчива в целом, когда
модифицированная частотная
характеристика ее линейной части
расположена справа от прямой Попова
при
,
если гистерезис положительный и
![]() если гистерезис отрицательный.
если гистерезис отрицательный.
Построив на комплексной плоскости модифицированную частотную характеристику линейной части, находим неравенство
![]() (9.49)
(9.49)
где
![]() - координата точки пересечения
- координата точки пересечения
![]() с вещественной осью, рисунок 9.12.
с вещественной осью, рисунок 9.12.
Это неравенство позволяет выбирать необходимые параметры релейного элемента, обеспечивающие устойчивость релейной системы в целом.
Если релейный элемент не имеет гистерезиса, то для устойчивости релейной системы в целом необходимо, чтобы условие (9.45) выполнялось при любом .
Если релейный элемент идеальный, то автоматическая система будет устойчива в целом, когда линейная ее часть устойчива или нейтральна а частотная характеристика линейной части расположена в нижней полуплоскости. Эти очевидные формулировки вытекают из условия (9.45) и общей формулировки устойчивости релейных систем в целом.
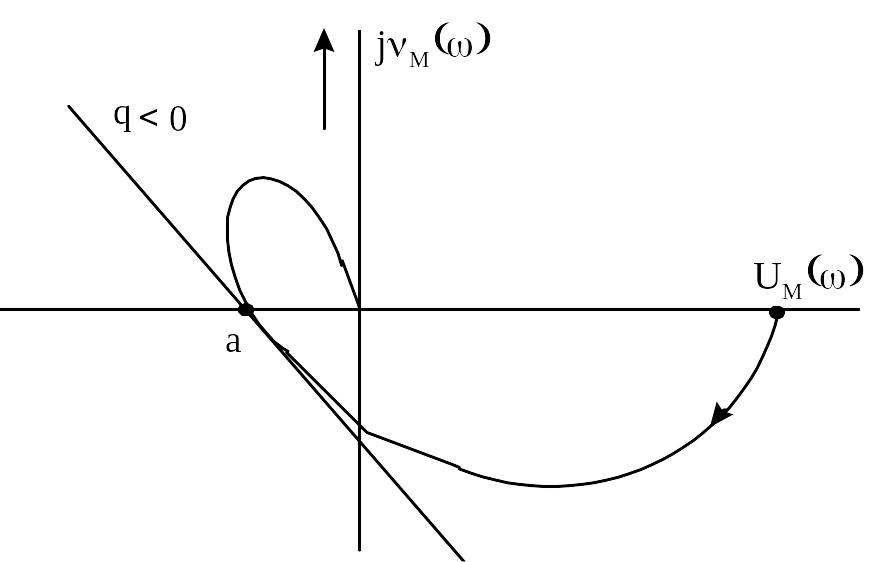
Рисунок 9.12 - Анализ устойчивости релейной САУ по критерию Цыпкина
9.6 Автоколебания в релейных автоматических системах
Следуя определению А.А.Андронова, автоколебаниями называют такие периодические движения в нелинейной системе, которые возникают под действием сил, зависящих от состояния системы (а не в результате внешних периодических воздействий).
Спецификой релейных систем является то, что форма выходной величины релейного элемента в периодическом режиме предопределена. Поэтому исследование автоколебаний сводится к изучению воздействия периодической последовательности прямоугольных импульсов на линейную часть системы и отысканию их параметров, удовлетворяющих существованию периодических режимов.
Периодическая последовательность прямоугольных импульсов (рисунки 9.4, 9.6, 9.8) может быть представлена с помощью ряда Фурье в виде суммы гармонических составляющих
![]() (9.50)
(9.50)
Для симметричной
функции
![]() четные слагаемые отсутствуют, поэтому
четные слагаемые отсутствуют, поэтому
![]() (9.51)
(9.51)
или в вещественной форме
![]() (9.52)
(9.52)
Рассмотрим наиболее простой случай, когда используется идеальный релейный элемент (без зоны нечувствительности, рисунок 9.1,а,б). Определив коэффициенты ряда Фурье для этого случая, выражение (10.52) перепишем в виде.
![]() (10.53)
(10.53)
Для нахождения
реакции линейной части на сумму
гармонических воздействий необходимо
амплитуду каждого гармонического
воздействия умножить на модуль
частотной характеристики линейной
части при этой частоте, а к фазе
гармонического воздействия прибавить
фазу частотной характеристики системы
![]() и все произведения сложить, т.е.
и все произведения сложить, т.е.
![]() (9.54)
(9.54)
где
![]() -амплитудно-частотная
характеристика линейной части системы.
-амплитудно-частотная
характеристика линейной части системы.
Для исследования автоколебаний в релейной системе вводится понятие годографа релейной системы
![]() (9.55)
(9.55)
где мнимая
![]() равна значению выходной величины
линейной части системы при
равна значению выходной величины
линейной части системы при
![]() с обратным знаком, а действительная
часть
значению производной выходной величины
линейной части системы при
с обратным знаком, а действительная
часть
значению производной выходной величины
линейной части системы при
![]() ,
отнесенной к частоте
тоже с обратным знаком.
,
отнесенной к частоте
тоже с обратным знаком.
Для релейных систем с зоной нечувствительности с увеличением числа условий существования автоколебаний дополнительно вводится характеристика
![]()
где
![]() характеризует отношение длительности
существования управлявшего воздействия
одного знака к величине полупериода
колебаний. Этот случай мы рассматривать
не будем.
характеризует отношение длительности
существования управлявшего воздействия
одного знака к величине полупериода
колебаний. Этот случай мы рассматривать
не будем.
Производная
![]() берется по
при
берется по
при
![]()
Если релейный элемент имеет зону нечувствительности, то вводятся два годографа релейной системы, которые мы не будем рассматривать.
С помощью годографов релейной системы удобно качественно и количественно исследовать влияние структуры и параметров линейной части системы и параметров релейного элемента на частоту и форму колебаний.
Годограф релейной
системы
![]() может быть определен:
может быть определен:
1) по частотной характеристике линейной части системы;
2) по временной характеристике линейной части системы;
3) по передаточной функции линейной части системы.
Рассмотрим методику определения по частотной характеристике линейной части системы. Используя (10.54), находим составляющие годографа релейной системы
![]() (9.56)
(9.56)
![]() (9.57)
(9.57)
Запись выражений
(9.55) и (9.56) объясняется тем, что через
полупериод
![]() сама периодическая функция и ее
производная изменяют знак по сравнению
со знаком, выбранным в момент начала
отсчета. Подставив значения (9.56), (9.57) в
выражение (9.55), получим
сама периодическая функция и ее
производная изменяют знак по сравнению
со знаком, выбранным в момент начала
отсчета. Подставив значения (9.56), (9.57) в
выражение (9.55), получим
|
(9.58) |
Здесь:
![]()
![]()
Выражение (9.58)
указывает на метод построения годографа
релейной системы по АФХ разомкнутой
линейно части. Первое слагаемое
для заданной частоты представляет собой
частотную характеристику разомкнутой
системы, в которой релейный элемент
заменен усилителем с коэффициентом
усиления, равным
![]() .
Остальные слагаемые зависят от частот,
кратных
.
Остальные слагаемые зависят от частот,
кратных
![]() .
.
Методика нахождения иллюстрирована на рисунке 9.13.
1. Задаются значениями
частот
![]() ,
,
![]() и т.д.
и т.д.
2. Находят значения
![]() ,
,
![]() ,...
и т.д.
,...
и т.д.
3. Строят по полученным
точкам на комплексной плоскости годограф
релейной системы
![]() .
.
Для нахождения
на АФХ линейной части определяют точки,
соответствующие
![]() ,
,
![]() ,
,
![]() ,
и т.д. Уменьшают ординаты точек
соответственно в
,
и т.д. Уменьшают ординаты точек
соответственно в
![]() раз и проводят к концам уменьшенных
ординат векторы из начала координат.
Геометрически суммируя все эти
векторы и умножая результат на
раз и проводят к концам уменьшенных
ординат векторы из начала координат.
Геометрически суммируя все эти
векторы и умножая результат на
![]() ,
получают значения
,
рисунок 9.13.
,
получают значения
,
рисунок 9.13.
Рисунок
9.13 - Методика построения
![]()
Если известна
![]() и
и
![]() ,
то найдя на
значения
,
то найдя на
значения
![]() ,
,![]() ,
,![]() и т.д. и просуммировав их, получим
и т.д. и просуммировав их, получим
![]() .
Аналогично, определив по графику
.
Аналогично, определив по графику
![]() значения
значения
![]() и т.д. и просуммировав их, получим
и т.д. и просуммировав их, получим
![]() .
По полученным координатам легко построить
.
По полученным координатам легко построить
![]() .
.
Годограф релейной
системы позволяет проверять условия
существования автоколебаний и определять
их частоту. Для этого на комплексной
плоскости строят
при изменении
![]() .
Пусть релейный элемент имеет характеристику,
как показано на рисунке 9.1в. Если на
комплексной плоскости провести прямую,
параллельную действительной оси и
отсекающую на мнимой оси отрезок, равный
-0,
то наличие точки ее пересечения с
годографом
в левой полуплоскости комплексной
плоскости говорит о возможных
автоколебаниях с частотой, равной
частоте, соответствующей точке
пересечения
.
Для этой точки справедливы соотношения
:
.
Пусть релейный элемент имеет характеристику,
как показано на рисунке 9.1в. Если на
комплексной плоскости провести прямую,
параллельную действительной оси и
отсекающую на мнимой оси отрезок, равный
-0,
то наличие точки ее пересечения с
годографом
в левой полуплоскости комплексной
плоскости говорит о возможных
автоколебаниях с частотой, равной
частоте, соответствующей точке
пересечения
.
Для этой точки справедливы соотношения
:
|
(9.59) |
Если учесть (9.55), то (9.59) перепишем так:
|
(9.60) |
т.е. мы получили условие надлежащего момента переключения и надлежащего направления переключения. Для точек пересечения в правой полуплоскости (рисунок 9.14) эти условия не выполняются.
Рисунок 9.14 - Автоколебания в релейной системе
При отрицательном
гистерезисе прямая
![]() заменяется на
заменяется на
![]() .
Если в релейной системе зона
нечувствительности отсутствует, то
следует считать
.
Если в релейной системе зона
нечувствительности отсутствует, то
следует считать
![]() , т.е. роль этой прямой будет выполнять
ось абсцисс.
, т.е. роль этой прямой будет выполнять
ось абсцисс.
9.7 Вынужденные колебания в релейных системах
Если на релейную систему действует периодическое
воздействие, то в ней могут быть три режима работы:
1) биение между автоколебаниями и вынужденными колебаниями;
2) вынужденные колебания, когда система синхронизируется автоматически частотой внешнего воздействия, подавляя автоколебания. Этот режим еще называют режимом принудительной синхронизации или захватывания;
3) режим
субгармонических колебаний, при котором
подавляются автоколебания и системе
навязываются вынужденные колебания,
частота которых составляет
![]() от частоты внешнего воздействия, где
от частоты внешнего воздействия, где
![]() - целое положительное число.
- целое положительное число.
Режим захватывания и субгармонический режим являются периодическими, тогда как режим биений является непериодическим.
Пусть на систему действует внешнее воздействие вида
![]()
где - максимальное значение внешнего воздействия;
![]()
При этом входная величина релейного элемента также изменяется по периодическому закону.
![]()
Условия существования вынужденных колебаний в релейной системе с релейным элементом, изображенным на рисунке 10.1,в, представим в виде
и
![]() .
.
При исследовании
вынужденных колебаний в релейной системе
без зоны нечувствительности частота
их
![]() задана, а искомой величиной является
сдвиг фаз
задана, а искомой величиной является
сдвиг фаз
![]() между вынужденными колебаниями и
внешним периодическим воздействием.
Величина должна быть действительной и
удовлетворять условиям существования
вынужденных колебаний.
между вынужденными колебаниями и
внешним периодическим воздействием.
Величина должна быть действительной и
удовлетворять условиям существования
вынужденных колебаний.
Для определения воспользуемся годографом релейной системы. Введем комплекснозначную функцию.
![]()
Если на вход подается гармоническое колебание, то
Отсюда следует,
что
![]() соответствует окружности радиуса
.
соответствует окружности радиуса
.
Рассмотрим сумму этой функции и годографа релейной системы.
![]()
Разделим на вещественную и мнимую часть сумму этих функций
![]()
![]()
При
![]() мнимая и действительная части тождественны
условиям надлежащих моментов и направлений
переключений. Поэтому условия
существования вынужденных колебаний
частоты
мнимая и действительная части тождественны
условиям надлежащих моментов и направлений
переключений. Поэтому условия
существования вынужденных колебаний
частоты
![]() можно записать в следующем виде:
можно записать в следующем виде:
![]()
![]()
Последнее условие указывает на путь определения наличия вынужденных колебаний.
Строят годограф релейной системы и на нем находят точку, соответствующую частоте . Из этой точки проводит окружность радиусом .
Условие существования автоколебаний будут выполняться для тех значений , при которых кривая пересекает прямую , в левой полуплоскости. Число найденных таким образом значений определяет число периодических решений, соответствующих возможным вынужденным колебаниям.
1. При малых
![]() ( рисунок 9.15,а) точка пересечения
с прямой
( рисунок 9.15,а) точка пересечения
с прямой
![]() отсутствует, вынужденные колебания
частоты
отсутствует, вынужденные колебания
частоты
![]() ,
которые бы подавили автоколебания, тоже
отсутствуют. В системе может быть
режим биений либо субгармонический
режим.
,
которые бы подавили автоколебания, тоже
отсутствуют. В системе может быть
режим биений либо субгармонический
режим.
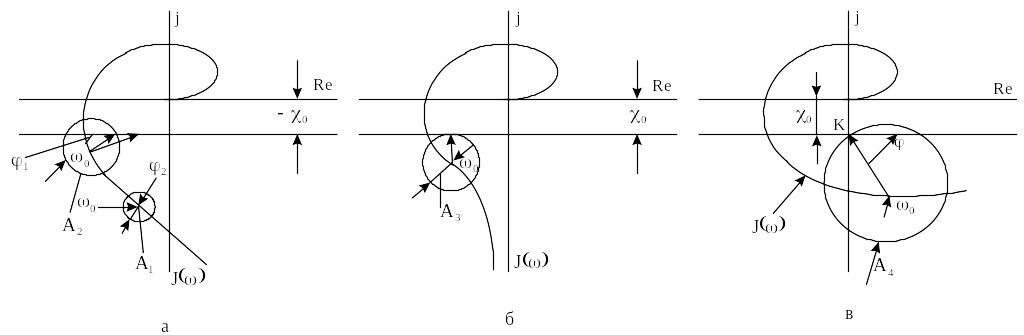
Рисунок 9.15 - Вынужденные колебания в релейной системе
2.
![]() -
большое, появляются точки пересечения
кривой
с прямой
в левой полуплоскости и, следовательно,
наблюдается режим вынужденных колебаний.
-
большое, появляются точки пересечения
кривой
с прямой
в левой полуплоскости и, следовательно,
наблюдается режим вынужденных колебаний.
3. Если
![]() ,
то
- касается прямой
,
рисунок 9.15.б.
,
то
- касается прямой
,
рисунок 9.15.б.
4. Если
![]() ,
то кривая
при некотором значении
,
то кривая
при некотором значении
![]() ,
пересекает прямую
лишь в точке
,
пересекает прямую
лишь в точке
![]() ,
где прямая пересекает мнимую ось, рисунок
9.15.в. Если
,
где прямая пересекает мнимую ось, рисунок
9.15.в. Если
![]() (рисунок 9.15.а) находится ниже прямой
,
то
(рисунок 9.15.а) находится ниже прямой
,
то
![]() и
и
![]() положительны, если выше - отрицательны.
положительны, если выше - отрицательны.
Если
находится в правой полуплоскости, то
![]() определяется как отрезок от точки,
соответствующей
определяется как отрезок от точки,
соответствующей
![]() до точки пересечения
с мнимой осью.
до точки пересечения
с мнимой осью.
Если частота
внешнего воздействия соответствует
частоте возможных автоколебаний, то
![]() , т.е. режим вынужденных колебаний
возможен при весьма малой амплитуде
внешних воздействий. Поскольку
годограф
, т.е. режим вынужденных колебаний
возможен при весьма малой амплитуде
внешних воздействий. Поскольку
годограф
![]() уменьшается при увеличении
,
то при достаточно высоких частотах
внешнего воздействия критическое
значение амплитуды
уменьшается при увеличении
,
то при достаточно высоких частотах
внешнего воздействия критическое
значение амплитуды
![]() становится малым и, следовательно,
может быть выбрана и малая амплитуда
внешнего воздействия, чтобы сорвать
автоколебания и установить режим
вынужденных колебаний частоты
.
становится малым и, следовательно,
может быть выбрана и малая амплитуда
внешнего воздействия, чтобы сорвать
автоколебания и установить режим
вынужденных колебаний частоты
.
9.8 Линеаризация релейных систем
Из-за существенно нелинейных свойств релейного элемента нарушается линейная связь между входной и выходной величинами, однако это позволяет коммутировать большие мощности простыми средствами. Указанный недостаток может быть устранен линеаризацией релейных систем, которую можно провести несколькими способами.
1. Линеаризация вынужденными колебаниями. Идея ее заключается в том, что на вход релейного элемента подается, кроме основного, медленно изменяющегося сигнала, высокочастотный сигнал, амплитуда которого больше амплитуды основного. Если на выходе релейного элемента включить фильтр низких частот, то на выходе фильтра получим среднее значение, зависящее от величины основного входного сигнала. При малых значениях отношения основного сигнала к амплитуде дополнительного гармонического сигнала получается линейная зависимость между входной и выходной величинами релейного элемента.
Неудобство такого метода линеаризации заключается в необходимости наличия отдельного независимого генератора, хотя это придает ей гибкость и позволяет изменять амплитуду и частоту дополнительного периодического воздействия.
2. Линеаризация автоколебаниями. В этом случае источником дополнительного периодического воздействия, производящего линеаризацию, являются автоколебания самой релейной системы, если частота их намного выше частоты внешнего воздействия.
В этих случаях обычно стремятся повысить частоту автоколебаний введением в управляющий сигнал производной от отклонения, упругих внутренних обратных связей, и т.д. Такая линеаризация релейных систем называется вибрационной. Она не позволяет в желаемом диапазоне изменять частоту и амплитуду автоколебаний.
3. Линеаризация с помощью скользящего режима. Смысл скользящего режима выясним, рассмотрев простейший пример следящей системы, изображенной на рисунке 9.16.
Релейный элемент РП имеет зону нечувствительности и гистерезис, рисунок 9.10.г. При перемещении движка задающего потенциометра увеличивается напряжение, приложенное к РП.
Рисунок 9.16 - Схема иллюстрации скользящего режима
При достижении
этим напряжением значения
![]() релейный элемент срабатывает и
включает замыкающим контактом
релейный элемент срабатывает и
включает замыкающим контактом
![]() или
или
![]() двигатель
,
который перемещает движок отрабатывающего
потенциометра. Как только движок
отрабатывающего потенциометра приблизится
к положения задающего настолько, что
напряжение на реле РП станет равным
напряжению отпускания
двигатель
,
который перемещает движок отрабатывающего
потенциометра. Как только движок
отрабатывающего потенциометра приблизится
к положения задающего настолько, что
напряжение на реле РП станет равным
напряжению отпускания
![]() ,
реле РП отключится, и двигатель
остановится.
,
реле РП отключится, и двигатель
остановится.
При дальнейшем изменении положения задающего потенциометра работа системы повторяется. Таким стразом, движок отрабатывающего потенциометра будет следить за положением задающего с погрешностью, равной .
Рисунок 9.17 - График перемещений задающей и отрабатывающей оси
Если характеристики РП представляет собой характеристику идеального релейного элемента (рисунок 9.1,б), то частота включений релейного элемента будет стремиться к бесконечности, при этом движок отрабатывающего потенциометра точно следит за положением движка задающего потенциометра .
Под скользящим
режимом понимается режим работы системы,
при котором регулирующий орган в процессе
компенсации возмущения перемещается
кратковременными включениями в одном
направлении. При этом очевидно, что
средняя его скорость перемещения
![]() всегда будет меньше скорости при
длительном включении
всегда будет меньше скорости при
длительном включении
![]() ,
,
где
![]() - постоянная времени сервомотора.
- постоянная времени сервомотора.
Скользящий режим
не может возникнуть в системе с
двухпозиционным релейным элементом,
поскольку в таком случае происходит
реверсирование сервомотора. Скользящий
режим, наблюдаемый в релейной системе,
линеаризует ее и позволяет применять
к ней общие методы исследования линейных
систем. В обычной релейной системе при
![]() (рисунок 9.18,а)
(рисунок 9.18,а)
![]() ,
,
![]() ,
однако переключение не изменяет знака
производной, хотя в общем случае
,
однако переключение не изменяет знака
производной, хотя в общем случае
 (9.66)
(9.66)
Однако в системе возможен другой случай (рисунок 9.18,б), когда
![]() .
(9.67)
.
(9.67)
Этот случай соответствует возникновению скользящего режима. Условием возникновения такого режима, очевидно, является то, что скорость роста сигнала обратной связи больше скорости роста входного внешнего воздействия, что и приводит к отключению релейного элемента.
![]()
![]()
Рисунок 9.18 - Изменение сигнала на входе реле при отсутствии и наличии скользящего режима
Выходной
сигнал
![]() ,
будет иметь
,
будет иметь
![]() ,
если индекс переда-точной
функции
,
если индекс переда-точной
функции
![]() элемента обратной связи, охватывающего
релейный элемент равен единице, рисунок
9.19.
элемента обратной связи, охватывающего
релейный элемент равен единице, рисунок
9.19.
Рисунок 9.19 - Схема реализации скользящего режима
При
![]() в релейной системе наблюдается идеальный
скользящий режим,при этом
в релейной системе наблюдается идеальный
скользящий режим,при этом
![]() .
(10.68)
.
(10.68)
На основании выражения (10.68) для системы, изображенной на рисунке 9.19, можно записать:
![]()
![]()
![]() ,
откуда
,
откуда
![]() ,
или
,
или
 .
(9.69)
.
(9.69)
Выражению (9.69) соответствует линейная система, изображенная на рисунке 9.20.
Рисунок 9.20 - Структурная схема линеаризованной системы
Такой же будет схема, у которой вместо релейного элемента установлен усилитель с бесконечным коэффициентом усиления,
![]() .
.
При
![]()
Здесь
![]() есть
результирующая передаточная функция
релейного элемента, охваченного
обратной связью.
есть
результирующая передаточная функция
релейного элемента, охваченного
обратной связью.
Таким образом, система, линеаризованная скользящим режимом, совпадает с предельной системой, получаемой при исследовании устойчивости положения равновесия релейной системы в малом.
Для скользящего
режима индекс
![]() ,
или просто
,
или просто
![]() ,
всегда должен быть равен единице.
,
всегда должен быть равен единице.
Если последовательно с релейным элементом включено звено, охватываемое обратной связью, то индекс произведения передаточных функций этого звена и звена обратной связи должен быть равен единице. В этом случае изменение параметров передаточной функции, последовательно включенной с релейным элементом, не будут сказываться на работе CAP, и, кроме того, в релейной системе наблюдается скользящий режим.
Итак, если релейная автоматическая система устойчива в целом (или малом), и индекс передаточной функции линейной части равен единице, то, начиная с некоторого момента, в релейной системе наступит скользящий режим, который называется частично скользящим режимом.
Непрерывный скользящий режим будет в том случае, если в любой момент времени
![]() .
(9.70)
.
(9.70)
Для выявления
скользящего режима необходимо в явном
виде найти
![]() и
и
![]() ,
причем
находят в предположении
,
причем
находят в предположении
![]() ,
а
определяют как реакцию звена обратной
связи на ступенчатое воздействие с
выхода релейного элемента.
,
а
определяют как реакцию звена обратной
связи на ступенчатое воздействие с
выхода релейного элемента.
9.9 Метод гармонической линеаризации
Этот метод является приближенным и основан на работах Н.М.Крылова и Н.И.Боголюбова. Впервые он был представлен Е.П.Поповым на II Всесоюзном совещании по теории автоматического регулирования в 1953 году. Метод отличается простотой, универсальностью и применим к различным видам нелинейности, позволяет исследовать системы любого порядка с несколькими нелинейностями.
Область использования
метода гармонической линеаризации
ограничена системами, обладающими
высокими фильтрующими свойствами
![]() и тем точнее, чем выше эти фильтрующие
свойства.
и тем точнее, чем выше эти фильтрующие
свойства.
Метод гармонической линеаризации позволяет опреде-лить условия устойчивости, амплитуду и частоту автоколе-баний, выбрать параметры коректирующих звеньев, обеспечи-вающие заданные характеристики системы.
Входная
и выходная величина нелинейного элемента
связаны нелинейной зависимостью
![]() .
.
Предполагают
и
![]() изменяются по гармоническому звкону;
выходная величина
не зависит от производной и интегра-лов
входной величины; среднее значение
за период равно нулю
изменяются по гармоническому звкону;
выходная величина
не зависит от производной и интегра-лов
входной величины; среднее значение
за период равно нулю
 .
.
Линеаризация
нелинейной характеристики нелинейного
элемента может быть произведена
различными способами, например разложением
в ряд Тейлора в окрестности рабочей
точки
![]()
где
![]()
Если на
вход нелинейного звена подаются
прямоугольные импульсы, то на выходе
наблюдаются тоже прямоугольные импульсы
причем
![]()
Величина
![]() в этом случае не остается постоянной,
а зависит от
- амплитуды входного сигнала.
в этом случае не остается постоянной,
а зависит от
- амплитуды входного сигнала.
Если на
вход нелинейного звена подан синусоидальный
сигнал
![]() то на выходе получим
то на выходе получим
![]() (9.71)
(9.71)
если
ограничится в разложении Фурье функции
![]() первой гармоникой.
первой гармоникой.
Если учесть, что
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
![]() ,
,
![]() четно,
четно,
то легко найти коффициенты разложения
![]()
Обозначим
![]() ,
тогда
,
тогда
![]() (9.72)
(9.72)
Коэффициент
![]() можно записать в таком виде:
можно записать в таком виде:
![]() или,
или,
изменив
пределы интегрирования,
 (9.73)
(9.73)
где
![]() -значение площади петли, образуемой
характеристикой
нелинейлого элемента, рисунок 9.21. Из
этого же рисунка очевидно,
что
для однозначных характеристик
-значение площади петли, образуемой
характеристикой
нелинейлого элемента, рисунок 9.21. Из
этого же рисунка очевидно,
что
для однозначных характеристик
![]() .
.
Таким образом, для однозначной нечетносимметричной характеристики гармонически линеаризованную связь выходной и входной величин можно представить в виде
![]() .
(9.74)
.
(9.74)
Для нечетносимметричной неоднозначной характеристики
![]() или в
операторном виде
или в
операторном виде
![]()
С учетом сказанного из выражения (9.71) получаем:
![]() (9.75)
(9.75)
Выражения (9.74) и (9.75) являются приближенными уравнениями нелинейных звеньев. В приложениях даются характеристики неленейностей и их коэффициенты гармонических линеаризаций.
Иногда пользуются понятием эквивалентной переда-точной функции (эквивалентный комплесный коэффициент усиления)
 (9.76)
(9.76)
где
![]()
Нелинейное отставание по координате в виде гистерезисной петли превращается при гармонической линеаризации в эквивалентное линейное отставание по фазе.
Рассмотрим способ вычисления коэффициентов гармони-ческой линеаризации для наиболее часто встречающихся видов нелинейностей (релейных характеристик) (рисунок 9.1 а,б,в,г,д). Наиболее сложный случай представляет релейная характеристика с зоной чувствительности и гистеризисом, изображена на рисунке 9.21.
При симметричных нелинейных характеристиках:
![]() ,
,
а для симметричных относительно начала координат характеристик получаем

C учетом сказанного рассмотрим характеристику изображенную на рисунке 9.21. Для этого случая
Рисунок
9.21
- Физический смысл коэффициента
![]()
поэтому
 .
(9.77)
.
(9.77)
Интегрируя выражения (9.77), находим
В частном случае, если
Таким образом, мы получили выражения для коэффициентов гармонической линеаризации для наиболее распространенных видов релейных характеристик.
Уравнение свободных колебаний в нелинейной системе
Для нелинейной системы, состоящей из одного нелинейного элемента и линейной части (рисунок 10.22), составим приближенное уравнение замкнутой системы.
Рисунок 9.22 - Расчетная схема нелинейной системы
Для линейной части
![]() .
(9.83)
.
(9.83)
Для нелинейного элемента
![]() .
(9.84)
.
(9.84)
Передаточная функция разомкнутой системы
![]() .
(9.85)
.
(9.85)
Складывая числитель и знаменатель передаточной функции
разомкнутой системы (10.85) и приравнивая сумму к нулю, получаем условное характеристическое уравнение замкнутой линеаризованной системы
![]() .
(9.86)
.
(9.86)
Если в системе регулирования возникают свободные незатухающие колебания постоянной амплитуды и частоты
![]() ,
то коэффициенты характеристического
уравнения становятся постоянными. В
этом - условность характеристического
уравнения (9.86), поскольку
,
то коэффициенты характеристического
уравнения становятся постоянными. В
этом - условность характеристического
уравнения (9.86), поскольку
![]() ,
входящее в уравнение, является параметром
системы, а не частотой, задаваемой извне.
,
входящее в уравнение, является параметром
системы, а не частотой, задаваемой извне.
Если решение
характеристического уравнения (9.86) при
![]() дает вещественные положительные значения
и
,
то в системе возможны автоколебания с
полученной амплитудой и частотой.
Это соответствует появлению незатухающих
колебаний в линейной системе, что
говорит о наличии чисто мнимых корней
характеристического уравнения.
Поэтому появление незатухающих свободных
колебаний в нелинейной системе может
быть обнаружено с помощью методов
отыскания границы устойчивости линейной
системы.
дает вещественные положительные значения
и
,
то в системе возможны автоколебания с
полученной амплитудой и частотой.
Это соответствует появлению незатухающих
колебаний в линейной системе, что
говорит о наличии чисто мнимых корней
характеристического уравнения.
Поэтому появление незатухающих свободных
колебаний в нелинейной системе может
быть обнаружено с помощью методов
отыскания границы устойчивости линейной
системы.
Способы определения автоколебательных режимов в нелинейной системе
а) Метод Гольдфарба
Условие возникновения незатухающих колебаний в системе, рисунок 9.22,
![]() ,
,
или
![]() .
(9.87)
.
(9.87)
Решение может быть
получено графически, если на комплексной
плоскости изобразить
![]() и
и
![]() .
Если указанные характеристики
пересекаются, то решение существует, и
в системе
возможны
автоколебания с частотой, соответствующей
частоте точки пересечения характеристик.
Если
и
не пересекаются, то в системе не могут
существовать колебания конечной
амплитуды.
.
Если указанные характеристики
пересекаются, то решение существует, и
в системе
возможны
автоколебания с частотой, соответствующей
частоте точки пересечения характеристик.
Если
и
не пересекаются, то в системе не могут
существовать колебания конечной
амплитуды.
Изменяя амплитудно-фазовую характеристику линейной части системы , можно избежать возникновения автоколебаний и сделать систему устойчивой.
В том случае, когда и пересекаются, возникает вопрос, а будут ли автоколебания устойчивыми?
Для ответа на этот
вопрос рассмотрим рисунок 9.23. Пусть
амплитуда колебаний в точке
![]() возросла и равна
возросла и равна
![]() Тогда точка переместится из
в точку
Тогда точка переместится из
в точку
![]() и будет соответствовать
и будет соответствовать
![]() .
Общий коэффициент усиления разомкнутой
системы равен
.
Общий коэффициент усиления разомкнутой
системы равен
![]() .
.
Рисунок 9.23 - Иллюстрация метода Гольдфарба.
Согласно критерию
устойчивости Найквиста-Михайлова
система регулирования будет устойчива,
если
![]() не схватывает точку
не схватывает точку
![]() ,
или, если
,
или, если
![]() не охватывает точку конца вектора
,
т.е.
не охватывает точку конца вектора
,
т.е.
![]() .
В рассматриваемом случае
охватывает точку
.
В рассматриваемом случае
охватывает точку
![]() ,
и, следовательно, амплитуда колебаний
будет возрастать.
,
и, следовательно, амплитуда колебаний
будет возрастать.
Если амплитуда
колебаний
![]() уменьшается, то вектору
уменьшается, то вектору
![]() будет соответствовать точка
будет соответствовать точка
![]() .
Вектор
не охватывает
ее и, следовательно, амплитуда колебаний
уменьшается дальше, система будет
устойчива, автоколебания с частотой,
соответствующей точке
.
Вектор
не охватывает
ее и, следовательно, амплитуда колебаний
уменьшается дальше, система будет
устойчива, автоколебания с частотой,
соответствующей точке
![]() ,
будет неустойчивы.
,
будет неустойчивы.
Пусть в системе есть
автоколебания, соответствующие точке
![]() .
При увеличении амплитуды
.
При увеличении амплитуды
![]() значение
значение
![]() сместится в точку
.
При этом
сместится в точку
.
При этом
![]() не будет охватывать точку
не будет охватывать точку
![]() ,
следовательно, система устойчива,
автоколебания уменьшатся по амплитуде,
и точка
переместится
в точку
.
Если амплитуда автоколебаний уменьшится
по сравнению с амплитудой, соответствующей
точке
,
следовательно, система устойчива,
автоколебания уменьшатся по амплитуде,
и точка
переместится
в точку
.
Если амплитуда автоколебаний уменьшится
по сравнению с амплитудой, соответствующей
точке
![]() ,
то
,
то
![]() (здесь:
(здесь:
![]() )
сместится в точку
)
сместится в точку
![]() .
При этом
будет охватывать точку
,
система станет неустойчивой, и амплитуда
колебаний начнет возрастать, смещая
точку
к
.
При этом
будет охватывать точку
,
система станет неустойчивой, и амплитуда
колебаний начнет возрастать, смещая
точку
к
![]() .
.
Таким образом, точке соответствует наличие в системе устойчивых автоколебаний.
Анализ рассмотренных
случаев показывает, что автоколебания
в нелинейной системе будут устойчивы,
если характеристика
![]() пересекает
и выходит из зоны охвата
при увеличении
.
Если
заходит в зону охвата
при увеличении
,
то автоколебания в системе неустойчивы.
пересекает
и выходит из зоны охвата
при увеличении
.
Если
заходит в зону охвата
при увеличении
,
то автоколебания в системе неустойчивы.
Аналитический метод
В общем случае нелинейный элемент может иметь характеристику
![]() .
(9.88)
.
(9.88)
Для неоднозначной
нелинейности, когда выполняется условие
(10.88), коэффициенты гармонической
линеаризации "![]() "
и "
"
и "![]() "
зависят как от
,
так и от
.
Подставив в характеристическое
уравнение (10.86)
"
зависят как от
,
так и от
.
Подставив в характеристическое
уравнение (10.86)
![]() , получим
, получим
![]()
или
![]() ,
(9.89)
,
(9.89)
где
![]() и
и
![]() - вещественная и мнимая часть
характеристического уравнения.
- вещественная и мнимая часть
характеристического уравнения.
Приравняв отдельно
нулю вещественную и мнимую часть,
получим два уравнения с двумя
неизвестными
![]() .
.
![]() .
(9.90)
.
(9.90)
Полученные совместным решением системы (9.90) значения и должны быть вещественными положительными. Только в этом случае имеет смысл проверять их на устойчивость. На рисунок 9.24 построена серия годографов типа Михайлова в плоскости координат , .
Устойчивой системе соответствует охват начала координат
годографом.
Пусть годограф
проходит через начало координат. Дадим
приращение амплитуде колебаний
![]() .
Этому будет соответствовать смещение
годографа относительно начала координат,
оцениваемое вектором.
.
Этому будет соответствовать смещение
годографа относительно начала координат,
оцениваемое вектором.
![]() .
.
Рисунок 9.24 - Годографы типа Михайлова
Изменению >0
будет соответствовать вектор
![]() .
.
Если,
![]() ,
то годограф типа Михайлова будет
охватывать начало координат. Но
,
то годограф типа Михайлова будет
охватывать начало координат. Но
![]() , поэтому
, поэтому
автоколебания
будут
устойчивы,
если![]()
Это будет иметь место, если выполняется условие:
![]() ,
(9.91)
,
(9.91)
поскольку
![]() .
.
Система управления будет устойчива, если выполняется неравенство (9.91).
Частные производные
(9.91) берутся
в точке
![]() ;
=0.
Для систем, описываемых дифференциальным
уравнением 5-го порядка и выше,
необходимо проверить выполнение критерия
устойчивости Михайлова для остальной
части годографа.
;
=0.
Для систем, описываемых дифференциальным
уравнением 5-го порядка и выше,
необходимо проверить выполнение критерия
устойчивости Михайлова для остальной
части годографа.
Использование определителя Гурвица
Условием наличия в
характеристическом уравнении пары
мнимых корней является равенство нулю
предпоследнего определителя Гурвица
![]() .Все
остальные определители должны быть
положительными.
.Все
остальные определители должны быть
положительными.
Этот способ имеет практический смысл лишь в том случае, если коэффициенты характеристического уравнения не зависят от , т.е. когда нелинейность однозначна.
Приравнивая нулю предпоследний определитель, находят значение амплитуды автоколебаний. Для отыскания частоты автоколебаний можно воспользоваться одним из уравнений (9.90), в которых амплитуда колебаний будет уже известной величиной.
Автоколебания в
системе устойчивы, если при увеличении
амплитуды колебаний выше расчетного
значения
![]() будет положительным, а при уменьшении
- отрицательным. Иными словами, нелинейная
система имеет устойчивые автоколебания,
если
будет положительным, а при уменьшении
- отрицательным. Иными словами, нелинейная
система имеет устойчивые автоколебания,
если
![]() .
(9.92)
.
(9.92)
Использование годографа типа кривой Михайлова
Этот метод нахождения параметров автоколебаний используется тогда, когда другие методы оказываются слишком громоздкими.
Рассматривая
![]() как
прямоугольные координаты, строят на
комплексной плоскости кривые для серии
конкретных значений
и .
Амплитуда и частота автоколебаний
определяются параметрами той кривой,
которая проходит через начало координат,
рисунок 9.24.
как
прямоугольные координаты, строят на
комплексной плоскости кривые для серии
конкретных значений
и .
Амплитуда и частота автоколебаний
определяются параметрами той кривой,
которая проходит через начало координат,
рисунок 9.24.
Задаваясь различными значениями , строят серию кривых при изменении в диапазоне, соответствующем их расположению у начала координат.
Если нет значений , при которых кривая типа Михайлова проходит через начало координат, то автоколебания в системе отсутствуют.
Устойчивость
автоколебаний может быть проверена по
значениям
для различных кривых. Если для случая,
изображенного на рисунке 9.24
![]() ,
то автоколебания устойчивы, поскольку
для
,
то автоколебания устойчивы, поскольку
для
![]() кривая типа Михайлова соответствует
устойчивой системе. При этом амплитуда
колебаний будет уменьшаться и при
кривая типа Михайлова соответствует
устойчивой системе. При этом амплитуда
колебаний будет уменьшаться и при
![]() в системе возникнут незатухающие
автоколебания. Для
в системе возникнут незатухающие
автоколебания. Для
![]() система неустойчива, амплитуда колебаний
в системе будет возрастать, и при
наступит состояние устойчивого
периодического движения с частотой
система неустойчива, амплитуда колебаний
в системе будет возрастать, и при
наступит состояние устойчивого
периодического движения с частотой
![]() .
.
9.10 Метод фазовой плоскости
Исследование нелинейных систем сопряжено со значительными трудностями, потому что не существует единого точного метода решения нелинейных уравнений. Для каждого вида нелинейности приходится изыскивать специфический частный метод.
Существенный интерес в теории управления представляет собой класс систем, состоящих из ряда линейных элементов и одного нелинейного.
Метод изображения переходных процессов на фазовой плоскости был введен академиком А.А.Андроновым. Метод дает возможность получить наглядную и точную картину всей совокупности переходных процессов при любых начальных условиях для систем второго порядка, содержащих нелинейные элементы.
Фазовой плоскостью называется плоскость, в которой по осям координат откладываются какие-либо две переменные, характеризующие переходный процесс в системе. Наиболее часто в качестве таких координат используются отклонения регулируемой величины и скорость ее изменения. Нелинейное дифференциальное уравнение вида
![]() (9.93)
(9.93)
сводится к двум
дифференциальном уравнениям первого
порядка введением переменной
![]() .
.
![]() ,
,![]() .
(9.94)
.
(9.94)
Эта система уравнений является частным случаем более общего
![]() ,
(9.95)
,
(9.95)
где
![]() и
и
![]() - нелинейные функции координат.
- нелинейные функции координат.
Для изображения переходного процесса на фазовой плоскости исключим из этих уравнений время. Для этого разделим второе на первое.
![]() .
(9.96)
.
(9.96)
В итоге получили
нелинейное дифференциальное уравнение,
у которого нет общего решения, поэтому
всякий раз приходится изыскивать частный
метод его решения. Решение уравнения
(9.96) есть некоторая функция
![]() ,
графическое изображение которой на
фазовой плоскости называется фазовой
траекторией. Каждой точке фазовой
плоскости соответствует только одна
фазовая траектория, кроме особых точек.
Это позволяет для различных начальных
условий
,
графическое изображение которой на
фазовой плоскости называется фазовой
траекторией. Каждой точке фазовой
плоскости соответствует только одна
фазовая траектория, кроме особых точек.
Это позволяет для различных начальных
условий
![]() и
и
![]() получить
наглядные фазовые портреты. Особыми
точками называются такие, в которых
происходит одновременное обращение в
нуль функций
и
:
получить
наглядные фазовые портреты. Особыми
точками называются такие, в которых
происходит одновременное обращение в
нуль функций
и
:
![]() .
(9.97)
.
(9.97)
На основании выражения
(9.97) в особых точках
![]() и
и
![]() обращаются в нуль, т.е. движение в них
прекращается, они представляют собой
точки равновесия системы. Это могут
быть реализуемые особые точки, т.е.
устойчивые, или нереализуемые, существующие
формально.
обращаются в нуль, т.е. движение в них
прекращается, они представляют собой
точки равновесия системы. Это могут
быть реализуемые особые точки, т.е.
устойчивые, или нереализуемые, существующие
формально.
Если координата , т.е. дана система уравнений (9.94), тогда фазовые траектории приобретают некоторые дополнительные свойства.
1. В верхней
полуплоскости
![]() ,
поэтому при возрастании
координата
увеличивается и, следовательно, движение
происходит на фазовой плоскости слева
направо. В нижней полу - плоскости
,
движение происходит справа на
налево.
,
поэтому при возрастании
координата
увеличивается и, следовательно, движение
происходит на фазовой плоскости слева
направо. В нижней полу - плоскости
,
движение происходит справа на
налево.
2. Если второе управление (9.94) разделить на первое, то
![]() .
.
При
![]() , т.е. в точках пересечения фазовых
траекторий с осью
, т.е. в точках пересечения фазовых
траекторий с осью
![]() касательные к фазовым траекториям
перпендикулярны оси
.
касательные к фазовым траекториям
перпендикулярны оси
.
Фазовые траектории линейного звена второго порядка
На примере построения фазовых траекторий линейного звена второго порядка легко проследить получение фазовых траекторий и особых точек наиболее важных типов, встречаемых в нелинейных системах. Пусть уравнение свободных колебаний в системе представимо в виде
![]()
или
![]() .
(9.98)
.
(9.98)
Геометрическое место точек, в которых наклон касательных ко всем фазовым траекториям одинаков, представляет собой линии, называемые изоклинами. В рассматриваемом случае изоклины прямолинейны
![]() ,
(9.99)
,
(9.99)
где
![]() - угловой коэффициент касательной к
траектории. Прямая линия проходит
через начало координат. Угловой
коэффициент изоклины
- угловой коэффициент касательной к
траектории. Прямая линия проходит
через начало координат. Угловой
коэффициент изоклины
![]() равен
равен
![]() .
.
Из (10.99) следует, что
при
![]() ,
,
при
![]() .
.
1. Если
![]() , то все траектории пересекают ось у под
отрицательным углом тем большим, чем
больше коэффициент демпфирования
, то все траектории пересекают ось у под
отрицательным углом тем большим, чем
больше коэффициент демпфирования
![]() .
Если
.
Если
![]() ,
то траектории будут пересекать ось у
под прямым углом. Биссектрисы квадратных
углов
,
то траектории будут пересекать ось у
под прямым углом. Биссектрисы квадратных
углов
![]() имеют
имеют
![]() ,
экстремумам фазовых траекторий
соответствует
,
экстремумам фазовых траекторий
соответствует
![]() .
.
Вид фазовой траектории зависит от корней характеристического уравнения
 ,
(9.100)
,
(9.100)
где 0 - частота собственных колебаний идеального осцилятора без демпфирования.
Из системы уравнений (9.98)
![]() .
(9.101)
.
(9.101)
Решив это уравнение, получаем уравнения фазовой траектории.
Произвольная
постоянная
![]() определяется из условия
определяется из условия
![]() ,
,
![]() .
В итоге получаем уравнение эллипса
.
В итоге получаем уравнение эллипса
![]() ,
,
где
![]() ,
,
и
- оси эллипса,
![]() ,
(рисунок
9.25).
,
(рисунок
9.25).
Для
![]() получаем уравнение
получаем уравнение
![]() ,
эллипсы
превращаются в концентрические
окружности.
,
эллипсы
превращаются в концентрические
окружности.
Начало координат в данном случае не принадлежит ни одной из траекторий и называется особой точкой типа центр.
Рисунок 9.25 - Фазовые траектории, соответствующие особой точке типа центр
Для
всякой заданной области, включающей
центр, можно найти такие начальные
условия
![]() и
и
![]() ,
при которых замкнутая кривая не будет
выходить из заданной области. Это значит,
что равновесие в точке (0,0) будет устойчивым
в смысле Ляпунова, но асимптотической
устойчивостью точка типа центр не
обладает.
,
при которых замкнутая кривая не будет
выходить из заданной области. Это значит,
что равновесие в точке (0,0) будет устойчивым
в смысле Ляпунова, но асимптотической
устойчивостью точка типа центр не
обладает.
2.
![]() .Уравнение
фазовой траектории принимает вид:
.Уравнение
фазовой траектории принимает вид:
![]() .
(9.102)
.
(9.102)
Корни
характеристического уравнения (9.100)-
комплексно сопряженные, т.е.
![]()
![]() (9.103)
(9.103)
Можно
доказать, что логарифмические спирали
с уравнением в полярной системе координат
![]() соответствуют системе (9.103).
соответствуют системе (9.103).
Если
![]() ,
то
при
,
то
при
![]() и
и
![]() стремятся к нулю,
рисунок
9.26,а,б.
Начало координат - это особая точка,
которая в данном случае называется
фокусом. Все
траектории
стягиваются к началу координат (или
уходят).
стремятся к нулю,
рисунок
9.26,а,б.
Начало координат - это особая точка,
которая в данном случае называется
фокусом. Все
траектории
стягиваются к началу координат (или
уходят).
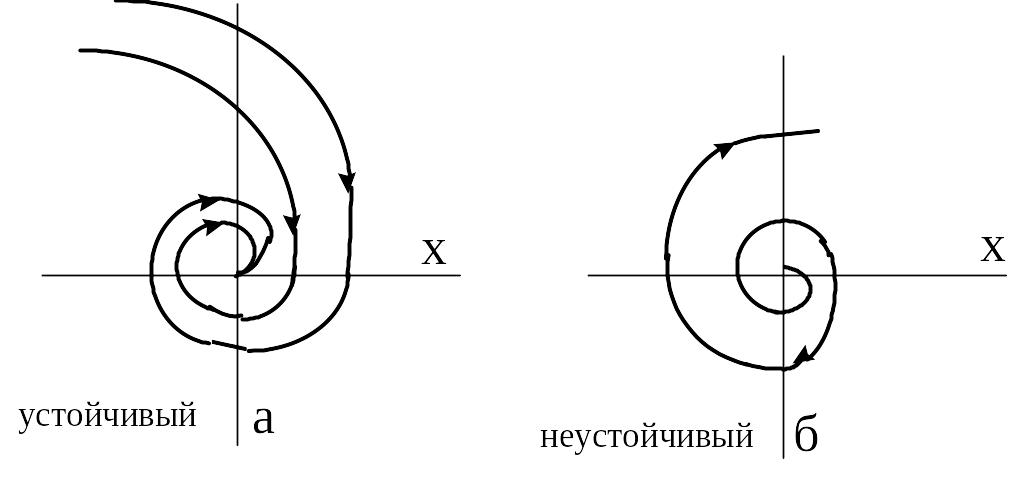
Рисунок 9.26 - Фазовые траектории, соответствующие особой точке типа фокус
3.
![]() .
Рассмотрим вначале положительное
демпфирование
.
Рассмотрим вначале положительное
демпфирование
![]() .
Можно доказать, что существует два
прямых луча, проходящих через начало
координат, которые одновременно являются
фазовыми траекториями.
.
Можно доказать, что существует два
прямых луча, проходящих через начало
координат, которые одновременно являются
фазовыми траекториями.
Пусть
уравнение искомого луча
![]() .
.
Подставляя это выражение в уравнение (10.99), получаем
![]() .
.
Получили уравнение такое же, как и исходное характеристическое уравнение (9.100). Угловой коэффициент является корнем характеристического уравнения исходного зве-на. Это говорит о том, что, во-первых, такой луч существует и, во-вторых, таких лучей два, рисунок 9.27.
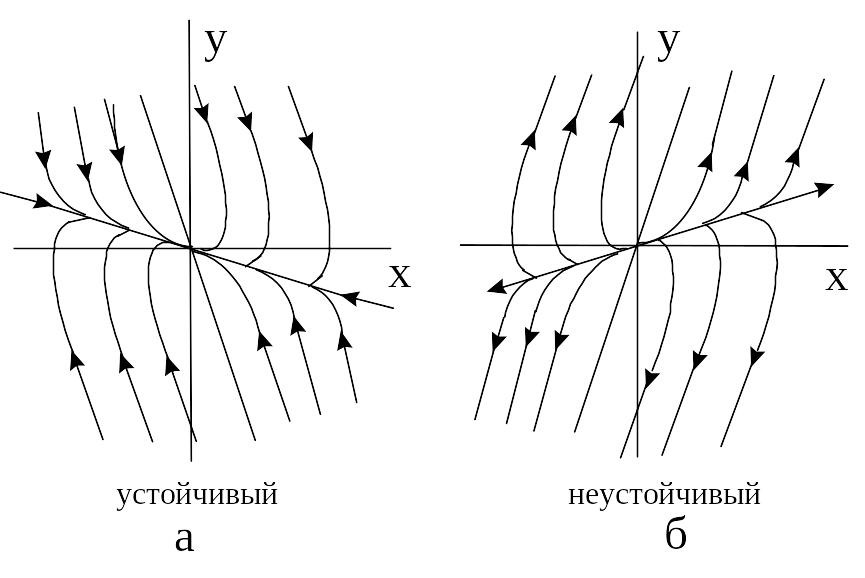
Рисунок 9.27 - Фазовые траектории, соответствующие особой точке типа узел
Луч, ближайший к оси ординат совпадает с одной из траекторий. Другой луч представляет собой предельную траекторию, к которой стремятся все остальные фазовые траектории. Внутри угла, образованного лучами, траектории идут монотонно, приближаясь к началу ординат, т.е. область внутри луча представляет собой область начальных условий, при которых процесс будет монотонным. За пределами этого луча переходный процесс будет не монотонен и с перерегулированием. Устойчивый процесс, когда корни вещественные отрицательные, приведен на рисунке 9.27,а, неустойчивый переходный процесс (корни положительные) - на рисунке 9.27,б.
Все траектории, стягиваясь к началу координат, имеют в точке равновесия одинаковые касательные и с вполне определенным наклоном. Такая точка равновесия называется устойчивым узлом (неустойчивым узлом).
4. Случай с отрицательной упругой силой. Уравнение динамики в этом случае принимает вид
![]() .
(9.104)
.
(9.104)
Существуют два луча с угловыми коэффициентами
![]() ,
,
которые разделяют фазовую плоскость на четыре характерные области, в каждой из которых фазовые траектории имеют гиперболический характер. Лучи, являясь асимптотами гипербол, представляют собой особые траектории.
От луча, проходящего во втором и четвертом квадрантах гиперболы удаляются, к лучу в первом и третьем квадрантах они приближаются асимптотически.
Наклон лучей зависит
от
![]() .
При
.
При
![]() он становится равным
он становится равным
![]() ,
и фазовые траектории располагаются
симметрично относительно осей координат,
рисунок 9.28.
,
и фазовые траектории располагаются
симметрично относительно осей координат,
рисунок 9.28.
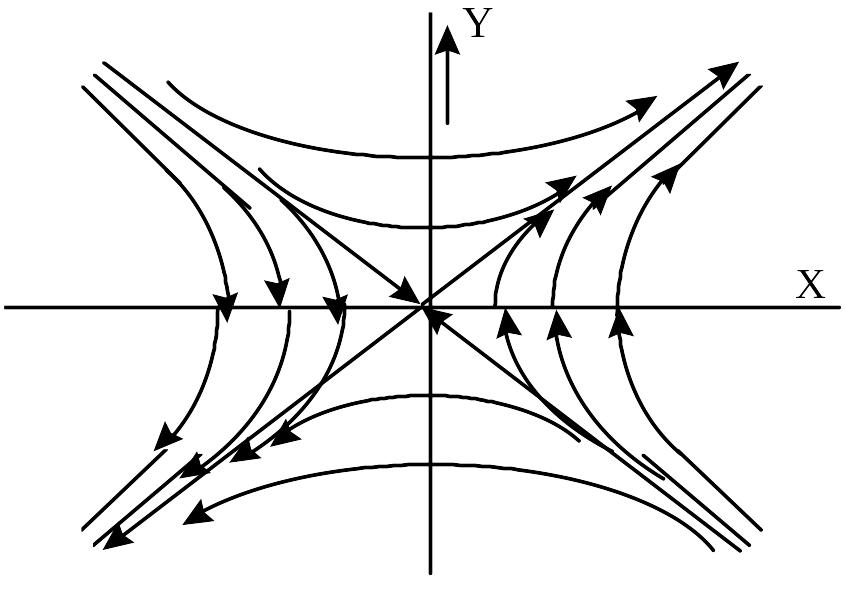
Рисунок 9.28 - Фазовые траектории, соответствующие особой точке типа седло
Особая точка - начало координат - является неустойчивой особой точкой. Фазовые траектории сначала приближаются к ней, а затем начинают удаляться. Такая особая точка называется седлом.
Если интегрирование
дифференциальных уравнений фазовых
траекторий затруднено или невозможно,
фазовый портрет может быть построен
графоаналитическим или графическим
методом. Одним из таких методов
является метод изоклин. Чтобы получить
уравнение изоклины, необходимо в
дифференциальном уравнении фазовой
траектории положить
![]() .
.
При этом уравнении изоклины
![]() ,
(9.105)
,
(9.105)
где
![]() - есть тангенс угла наклона фазовой
траектории к оси абсцисс. Задаваясь
различными значениями
, получим семейство кривых, изоклин,
рисунок 9.29.
- есть тангенс угла наклона фазовой
траектории к оси абсцисс. Задаваясь
различными значениями
, получим семейство кривых, изоклин,
рисунок 9.29.
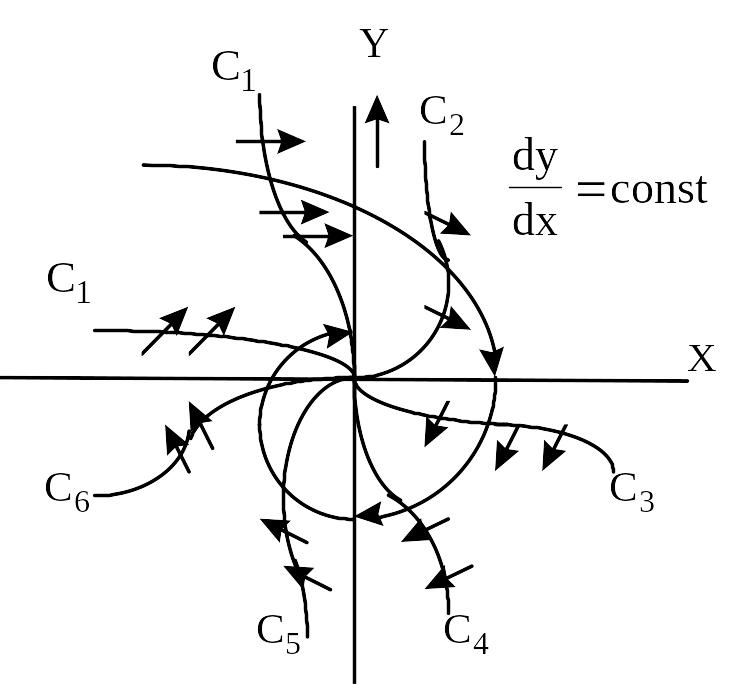
Рисунок 9.29 - Построение фазовых траекторий методом изоклины
В первом приближении фазовая траектория может быть построена по стрелкам на изоклинах, указывающим наклон фазовых траекторий в точках, образующих изоклин
Более точно фазовую траекторию можно построить, если использовать метод канонических полигонов, заключающийся в том, что, если известны направления касательных к интегральной кривой на соседних изоклинах, то угол наклона траектории кривой выбирается как биссектриса угла, образованного этими направлениями на предыдущей изоклине, рисунок 9.30
Метод изоклин достаточно громоздок и трудоемок, его точность определяется числом изоклин и (при желании) может быть достаточно высокой, если выбрать соответствующее число изоклин и масштаб чертежа.
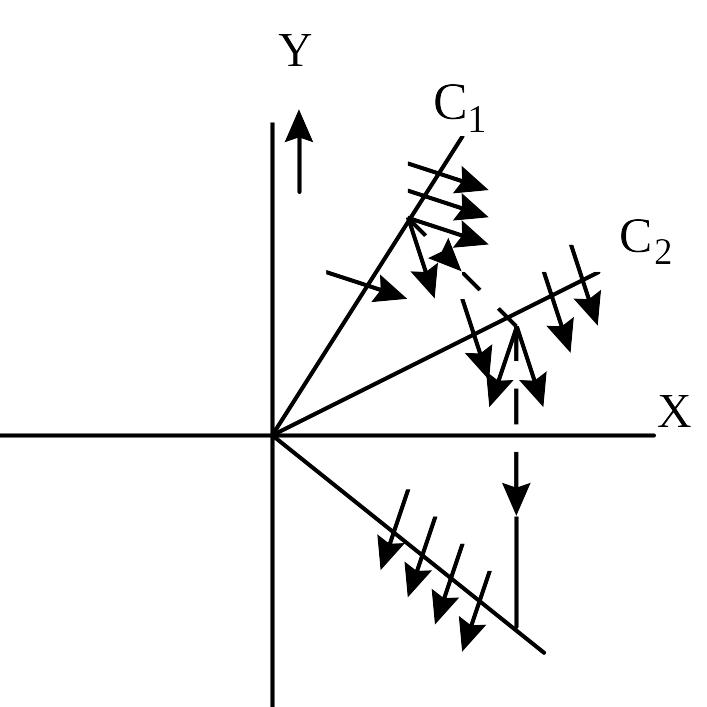
Рисунок 9.30 - Иллюстрация метода канонических полиномов
Метод точечных преобразований
Применение метода фазовых портретов для многомерных автоматических систем становится затруднительным, особенно в случае медленно затухающих или автоколебательных систем вследствие возрастающей трудоемкости графических построений. Поэтому актуальна разработка метода, позволяющего без построения полного фазового портрета определять характер колебаний, наличие автоколебаний и их характеристик в системе. Эту задачу решил академик А.А.Андронов с помощью метода точечных преобразований.
Практически рассматриваемый метод получил распространение лишь для систем второго порядка, описываемых кусочно-линейными уравнениями.
Сущность его состоит в том, что фазовая плоскость разбивается на ряд областей, в пределах которых переходные процессы описываются линейными дифференциальными уравнениями.
При переходе их из одной области в другую уравнения тоже изменяются скачком к новой форме. С помощью этих уравнений аналитически определяются положения начальных и конечных точек фазовых траекторий на стыках областей (линии переключения). По расположению граничных точек фазовых траекторий можно судить о характере колебательных движений, о наличии предельных циклов и т.д.
Пусть известны уравнения линий переключения (пунктирные линии) и уравнения фазовых траекторий в первой и второй областях, рисунок 9.31.
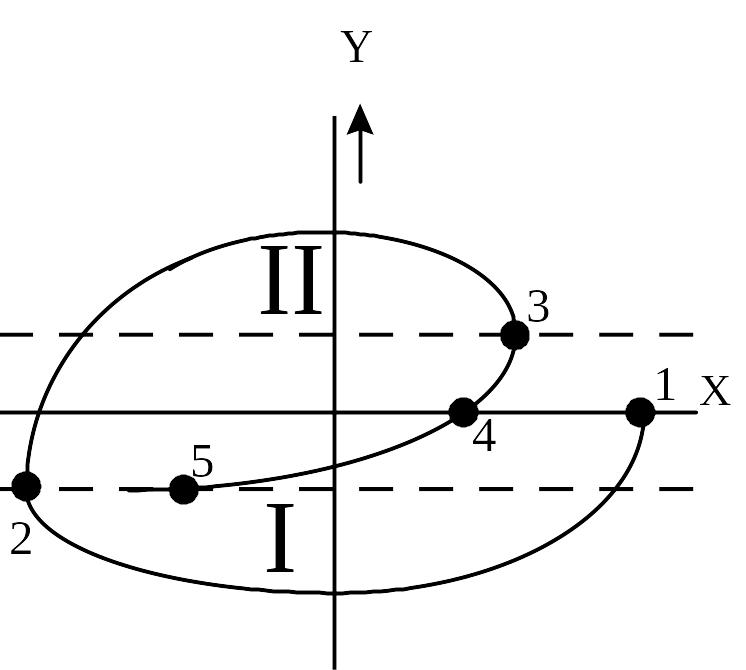
Рисунок 9.31 - Иллюстрация к методу точечных преобразований
Выбрав начальную точку 1, с помощью уравнений линии переключения и фазовой траектории в первой области находим точку 2. Аналогично находим точки 3 и 5. В итоге получаем точечное преобразование правой полуоси X самой в себя. Достаточно вычислить точки 2,3,4,5 не строя фазового портрета.
Точка 4 лежит ближе
к началу координат, чем 1, следовательно,
колебания затухают. Задаваясь различными
начальными условиями в пределах
возможных, можно построить характеристику
зависимости
![]() ,
которая называется функцией последования,
рисунок 9.32.
,
которая называется функцией последования,
рисунок 9.32.
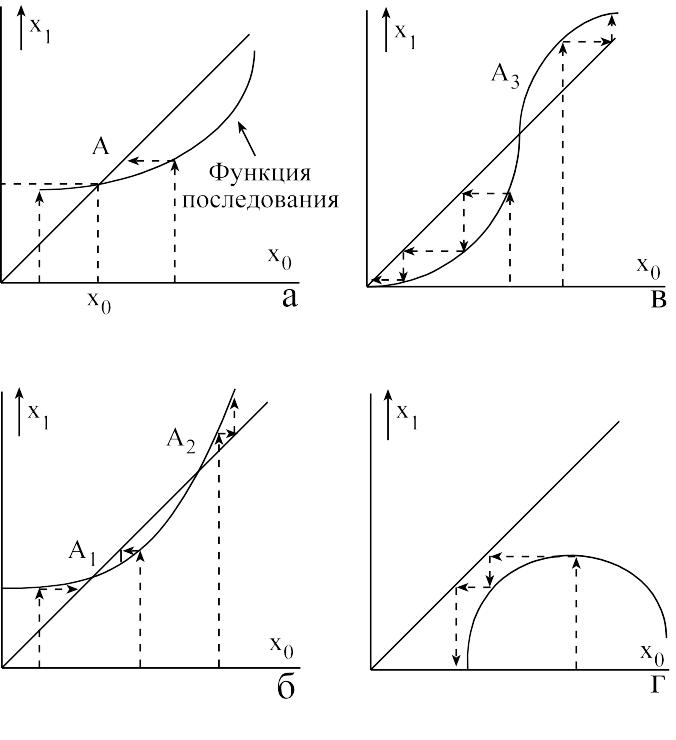
Рисунок 9.32 - Виды функций последования
Если провести линию
под углом в 45°, то получим точку
пересечения с функцией последования.
В этой точке
![]() ,
т.е. точка
преобразуется сама в себя, что соответствует
предельному циклу. Произведя простые
построения, легко определить характер
автоколебаний. Эти построения носят
название диаграммы Ламерея, рисунок
9.32,б,в,г. На рисунке 9.32,6 точке
соответствуют устойчивые автоколебания
и, следовательно, устойчивый предельный
цикл, а точка
,
т.е. точка
преобразуется сама в себя, что соответствует
предельному циклу. Произведя простые
построения, легко определить характер
автоколебаний. Эти построения носят
название диаграммы Ламерея, рисунок
9.32,б,в,г. На рисунке 9.32,6 точке
соответствуют устойчивые автоколебания
и, следовательно, устойчивый предельный
цикл, а точка
![]() - неустойчивый предельный цикл. Точке
- неустойчивый предельный цикл. Точке
![]() на рисунке 9.32. в соответствует неустойчивый
предельный цикл. Для функции
последования, изображенной на рисунке
9.32.г предельные циклы отсутствуют,
автоколебаний в системе тоже нет.
на рисунке 9.32. в соответствует неустойчивый
предельный цикл. Для функции
последования, изображенной на рисунке
9.32.г предельные циклы отсутствуют,
автоколебаний в системе тоже нет.
Особенности метода точечных преобразований
1. Применим только для кусочно-линейных систем, так как только для них возможно аналитическое вычисление положения граничных точек.
2. Необходимо знание уравнений линий переключения.
3. Полученные характеристики не имеют прямой связи с параметром времени.
В настоящее время разработан обобщенный метод точечных преобразований, используемый для существенно нелинейных и многократных колебательных систем. Он свободен от недостатков классического метода А.А. Андронова (см. А.В. Башарин, И.А. Башарин "Динамика нелинейных автоматических систем управления").
Литература
1 Теория автоматического управления. В част./ Н.А.Бабаков, А.А.Воронова и др. под. ред. А.А.Воронова. - М.: Высшая школа, 1986 г. ч.1 - 367 с .
2 Зайцев Г.Ф. Теория автоматического управления и регулирования. - Киев: Вища школа, 1988 г. - 430 с., ил.
3 Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: "Наука", 1978 г. - 256 с.
4 Пугачев В.И. Методические указания и программы расчета основных характеристик систем автоматического управления. Краснодар, Изд. КубГТУ, 1996, - 77с.
5 Теория автоматического управления. В част./ Н. А. Бабаков, А. А. Воронова и др. под. ред. А.А.Воронова. - М.: Высшая школа, 1986 г.
Ч 2 - 504 с., ил.
6 Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. - М.: Наука, 1988 г. - 256 с.
7 Цыпкин Я.З. Релейные автоматические системы. -М.: Наука, 1974, -575 с.