

Продиференціююємо вирази ( 2.2 ) по всіх змінних, отримаємо
dX=x1/p·dY + Y/f·dX1 - Y·x1/ f²·df,
dZ= z1/f·dY + Y/f·dz1 - Y· z1/ f²·df, (2.3 )
dY= f/p·dB + B/p·df - B·f/p².
Перейдемо до середніх квадратичних похибок та отримаємо
m²X= (x1/f)²m²Y + (Y/f)²m²x1 + (Y·x1/ f²)2m²f,
m²Z= (z1/f)²m²Y + (Y/f)²m²z1 + (Y· z1/ f²)²m²f, (2.4 )
m²Y=( f/p)²m²B + (B/p)²m²f + (B·f/p²)²m²p.
У першому та другому рівняннях переважає величина похибки mY порівняно з похибками mx1, mz1 і mf. Тому другим та третім членами можемо знехтувати. В останньому рівнянні точність визначення фокусної віддалі є досить високою – відносна похибка, як правило, становить mf : f = 1:10000, і тому впливом похибкики mf можна знехтувати. Похибка визначення базису теж невелика і завжди можна так організувати польові геодезичні роботи, щоб відносна похибка була не гірша, аніж mB : В = 1:2000.Тому впливом похибки mB теж можна знехтувати.
Після цих уточнень з (2.3) маємо
mX = x1/f·mY, mZ = z1/f·mY, mY = Y/p·mp. (2.5)
Аналіз формул (2.4) показує, що похибка mY залежить від точності визначення паралакса mp. На неї впливають:
точність стереофотограмметричного вимірювання, яка становить для ЦФС 0.005-0.003 мм,
похибки у встановленні під час фотографування кутових елементів зовнішнього орієнтування знімків; підрахунки показують, що при встановленні кутів з точністю 5" ці похибки становлять 0.003-0.006 мм.
Сумарна похибка mp обчислюється як сума квадратів елементарних середніх квадратичних похибок та становить 0.010-0.015 мм.
Проведемо розрахунок похибок (2.4) для такого конкретного випадку: х1 =30 мм, z1 = 40 мм, mY = 10 мм, Yф = 32 м, mx1 = mz1 =5 мкм, mf = 5 мкм. Отримаємо наступні значення:
mX = 1.983 мм;
mZ = 2.514 мм.
my = 10.000 мм.
Аналізуючи отримані результати, необхідно зробити висновок, що вони відповідають точності архітектурніх обмірів ІІ класу.
2.2. Технологічна схема обробки зображень.
2.2.1 Орієнтуванння зображень на цфс.
При зйомці споруд потребується підвищена точність вимірювальних робіт, що досягається зменшенням відстаней, збільшенням базису, збільшенням кількості знімків з кожної фотостанції тощо.
Одна з можливостей підвищення точності робіт – найповніше врахування поправок за зміну елементів внутрішнього та зовнішнього орієнтування.
Для наземного знімка використовується просторова фотограмметрична система координат SXYZ має початок в центрі проекції S. Вісь Z займає вертикальне положення, осі X та Y – творять горизонтальну площину, причому це може бути або ліва, або права система. Найчастіше це права система, показана на рис.4
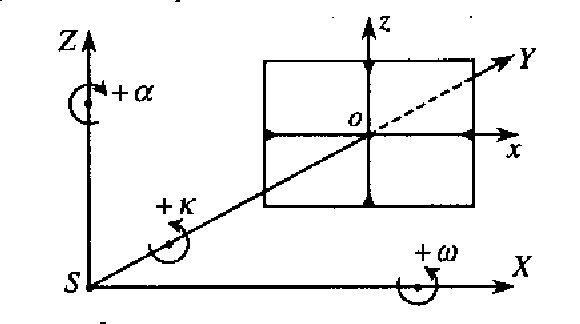
Рис.4 Просторова фотограмметрична система при наземному зніманні та повороти системи координат знімка на кути α, ω, κ.
Особливістю наземного знімання є те, що тут можна зафіксувати і лінійні, і кутові елементи зовнішнього орієнтування кожного знімка.
Оскільки знімання ведеться з базису фотографування, то елементами зовнішнього орієнтування двох знімків можуть бути різні величини. Їх вибір залежить, як від випадку поодинокого знімка, від поставленої задачі та зручностей користування.
Для поодинокого знімка найприйнятнішим є класичний підхід: Xs, Ys, Zs – це лінійні елементи зовнішнього орієнтування (координати центра проекції) у вибраній просторовій системі координат; α, ω, κ – кутові елементи, що характеризують кутову орієнтацію системи координат знімка відносно просторової системи.
Особливістю елементів кутового орієнтування при наземному зніманні для поодинокого знімка полягає в наступному: що, замість кута α, який
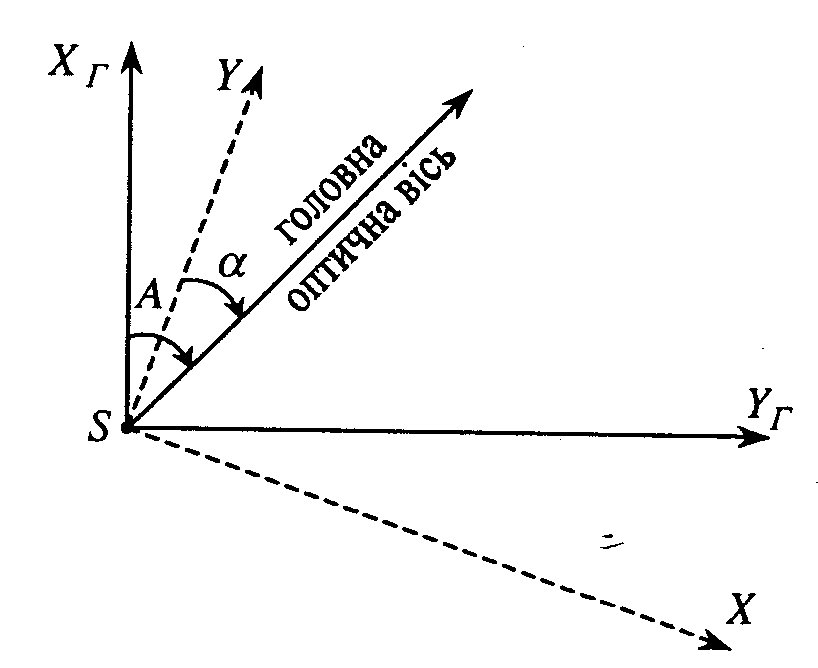
Рис.5. Відрахування кутів А при наземному зніманні.та α
відраховується від осі Y, використовують дирекційний кут А напрямку головної оптичної осі фотокамери (рис.5), який відраховують від осі Хг.